
Adjust servo/PWM speed (0-20) between two positions to quickly experiment and tune motion; select board/port; settings aren't saved.
Compatible with:
 Windows
Windows
How to add the Servo Speed robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Servo category tab.
- Press the Servo Speed icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Servo Speed robot skill.
How to use the Servo Speed robot skill
This skill allows you to adjust the speed of a servo or PWM between two positions. It can be used for quickly identifying and experimenting with servo speeds for your application. This skill does not save the last setting or restore settings when the project is loaded.*Note: Before this skill can be used, the servo position must be initialized. To do this, you can simply set the position with a script command or a servo skill. If you wish to have your robot initialize a servo speed when connected, use the Connection skill and the ServoSpeed() command in an initialization script.
Main Window

1. Servo Speed Slider
Press and hold the left mouse button down in this area to adjust the slider value. The range is 0-20. The lower the value the higher the speed.
2. Servo Speed Display
The speed value will be displayed here.
Settings
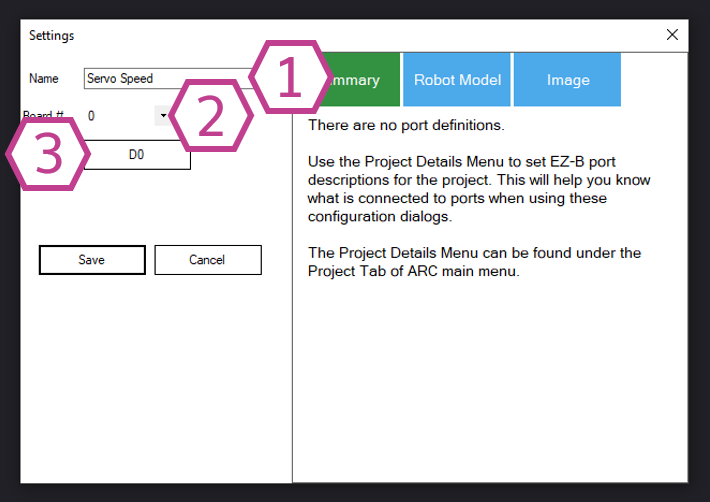
1. Title Field
This field contains the title of the skill. You can change it if you'd like. *Note: Changing the title will also change the title in the controlCommand() associated with this skill.
2. Board Index Drop-down
Select the EZB index number that your servo is connected to.
3. Port Selection Drop-down
Select the port number that your servo is connected to.
How to use Servo Speed
1) Add the Servo Speed skill to your ARC project (Project -> Add Skill -> Servo -> Servo Speed).
2) Add a Servo skill to your ARC project (Project -> Add Skill -> Servo).
3) In the Servo Speed skill settings select the port that you would like to adjust the speed of.
4) Adjust the servo speed in the main window of the Servo Speed skill.
5) Move servo with the servo skill and watch as it matches the speed set by the Servo Speed skill.
Resources
Speed : Delay for ezb v4 =========== 10 = 100 ms 9 = alternating between 80, 100 ms 8 = 80 ms 7 = alternating between 60, 80 ms 6 = 60 ms 5 = alternating between 40, 60 ms 4 = 40 ms 3 = alternating between 20, 40 ms 2 = 20 ms 1 = 20 ms, but the angle step is 2 or -2
The delay of speed is discussed here
Video
Related Tutorials
Related Questions
question

Strange Issue With Servo Speed/Delay/Steps And Usb Camera
Hi everyone, I have been following you for some time and first of all I wanted to thank this forum and the fantastic Ez...
question

Leap Motion Combine With ARC To Control In Space
I'm trying to use LEAP Montion on ARC but I'm still not successful and I posted this question in the hope that someone...
question
Audio, Servo Movement Panels Are Only On Connection 0 ?
I noticed audio and the servo movement panels only work on connection 0 ? I also use connection 1, and connection 2,...
question

Question For Power Supply Requirement
Hey guys, I am looking into how to build a bigger servo actuator at the moment... Its nothing like a full blown project...

Upgrade to ARC Pro
Experience the transformation – subscribe to Synthiam ARC Pro and watch your robot evolve into a marvel of innovation and intelligence.
Trying to something similar with Blockly, Virtual stepper servo but it doesn't seem to be working.
The stepper motor robot skill doesn’t support the protocol of servo speed. That’s a servo specific parameter. The stepper motor can emulate a servo using the robot skill, but there’s no way for the speed to be adjusted as they’re controlled differently.
Ok understand, is there a way to Home/zero the stepper through Controlcommand? I was trying zero each virtual port in controlled orderly fashion by doing one at a time with a switch/sensor and still continue on with Blockly.
After experimenting it is actually able to change speeds in the advanced area. How about approaching this a different way, can we make the number input for speed to be a variable and make a block for it or a command control for it? If this possible then it solves the problem. The reason that I'm pursuing the speed condition somewhat vigorusly is that I know it will be very important for different situations. You may want to move an arm somewhat quickly but when you get near it you'll want to slow it down hover the sensor over it, read the data and pick up the pencil/pin etc.