

Add ADC positional feedback to hobby PWM servos via minor mod to EZ-B/Arduino; enables real-time position readout, calibration and puppet mirroring
Requires ARC
v10
(Updated 9/10/2022)
Compatible with:
 Windows
Windows
How to add the PWM Servo Feedback (ADC) robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Servo category tab.
- Press the PWM Servo Feedback (ADC) icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the PWM Servo Feedback (ADC) robot skill.
How to use the PWM Servo Feedback (ADC) robot skill
This control will allow hobby PWM servos to have positional feedback in ARC with a slight modification requiring a wire, soldering iron, and Philips screwdriver. This uses the ADC port on the EZ-B (v4, Arduino, etc.)
Example
In this video, we remote control a JD with another JD. The servo positions from one JD are read using this robot skill, and the positions are set to the other JD. This is like using one JD as a puppet to control the other JD.Video Tutorial
Watch this video tutorial to see how the servos are modified and connected to the EZB. This video also shows how to calibrate the servos for the range position.Config
The configuration menu is outlined in the above tutorial video. Select the ADC port for the servo and select the servo port. You can manually enter the ADC values or auto-calibrate the Min and Max positions.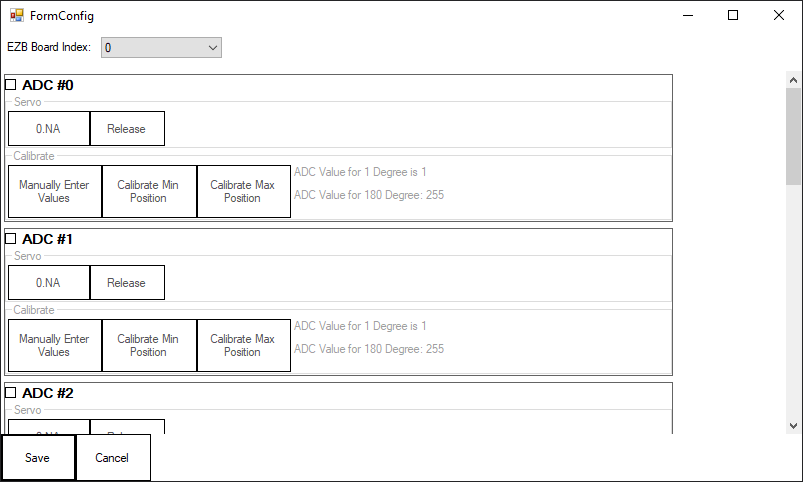
Related Hack Events
live hack

PWM Servo Position Feedback (Read Servo Position)
Hack PWM servos for real-time positional feedback in EZ-Builder using EZ-B v4, Arduino or IoTiny with ADC/I2C Synthiam...
live hack

Robot As Puppet To Control Another Robot By Reading Servo...
Control a robot puppet by reading servo potentiometer signals into an EZB ADC to mirror servo positions in real time
Related Questions
question
Is There Anyway To Control A Dc Motor Like A Servo?
Is there anyway to control a dc motor like a servo with position feedback using ACR an Arduino?
question

ESP32 CAM ADC Jitter With PWM Servo Feedback
Using an ESP32-CAM (AI Thinker) flashed with the Synthiam firmware as my EZ-B over Wi-Fi (client mode), I’m trying to...

Upgrade to ARC Pro
With ARC Pro, your robot is not just a machine; it's your creative partner in the journey of technological exploration.
Thanks. This opens up all sorts of better building and money savings.
Fantastic DJ!!!
@DJ, Hello.
I have a servocity Linear servo with 3 wire that does connect to the EZB servo port. I watched your live hack about using the PWM servo Feedback(ADC). I want to hack my Linear servo to use PWM servo Feedback(ADC), . Link to the linear servo; https://www.servocity.com/12-stroke-115-lb-thrust-linear-servo/
Background on my linear servo: When I turn on the power to my linear servo it automatically pulls the linear shaft all the way down. I would like it to stay at the last position or the Stand position and not pull the shaft all the way down. will hacking my linear servo allow it to stay at the last position used after turning the power off then back on again?
Is there a way to add a script when the EZB is turned on then turn my linear servo power on to hold the last position? I know I can add a script in the connection configure, just not sure how to write the script and if using the PWM servo Feedback(ADC) will work.
So long store, does the hack keep the last position used?
Thank you in advance for your time.
@DJ,
I think I have a way so my linear actuator does not pull down position. However, I am needing Board #4. Is possible to add (select Board number as you can in Auto Position)? This is a new feature request please.
Thank you, cheers, merne
Updated to allow selecting the ezb board index.
Wow DJ, You're awesome!
That was fast. I didn’t expect you to do it today. Isn’t it a holiday for you guy’s up North today?
Thank you very much DJ,much appreciated.
Cheers
@DJ,
Sorry the newer version did not work. I even did the version update no luck. Uninstalled ARC and reinstalled ARC still no luck. See picture below... Thank you DJ.
Updated for that message.