

Windows ARC plugin for Omron HVC-P/HVC-P2: Python-based face/body/hand detection, gaze, age/gender, expressions and recognition; dual-camera support.
How to add the Omron HVC-P2 (Second Camera) robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Camera category tab.
- Press the Omron HVC-P2 (Second Camera) icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Omron HVC-P2 (Second Camera) robot skill.
How to use the Omron HVC-P2 (Second Camera) robot skill
Omron HVC-P2 plugin for ARC Windows, onboard PC required. This will also work with the original HVC-P.
Required Download And Installation: Download Python_Install_Zip Unzip it and install Python and PySerial.
This was created to be used with a second Omron HVCP(2) camera if you are using 2 as the variables have an extension "_2" in ARC.
Please Note Per Omron technical support, it is recommended for each camera to have their own album of saved user faces. It is not recommended to share album data between cameras.
When using a second Omron camera the cameras will receive a port number based on a "first come, first serve" basis. Please be mindful of the port assignments.
This is an updated version of the original plugin David Cochran created for the Omron HVC-P which used the Omron EvaluationSoftware_v1.2.0 software for trained faces.
My version of the plugin includes the updated EvaluationSoftware_rev.2.4.1 software for training faces. It works with both the original HVC-P and the HVC-P2.
As with David Cochran's original plugin you will need to use an ARC script to control the camera and it is recommended that you us the Variable Watcher to see the values that the camera returns.
HVC-P Original Camera UART Connection: FTDI Friend - Adafruit is what I use to connect from the serial port to the Omron. The pin layout is as follows on the back of the Omron. Please Note: This is not required for the HVC-P2 Camera.
Ground is the first pin toward the center part of the Omron Ground is the 1st pin - connect to the ground pin on the FTDI friend 5V VCC is the 3rd pin - connect to VCC on the FTDI friend RX is the 4th pin - connect to TX on the FTDI friend TX is the 5th pin - connect to RX on the FTDI friend This config should allow you to use 921,600 baud.
The options are listed in the plugin. To use the plugin you can use a script. This will return all of the variables possible.
b = Body Detection (where and how many) h = Hand Detection (where and how many) f = Face Detection (where and how many) g = Gaze (direction person is looking) s = Gender (male, female or -1) a = Age (estimated age of the first face) o = Face Orientation (direction face is looking) x = Face Expression (happy, sad, angry, surprised...) e = Eye Estimation (how open or closed the eyes are) r = Face Recognition
#Available Omron Variables in ARC for a 2nd Omron Camera
$Omron_age_2
$Omron_age_Reliability_2
$Omron_body_CoordX_2
$Omron_body_CoordY_2
$Omron_body_Count_2
$Omron_body_Reliability_2
$Omron_Camera_Error_2
$Omron_expression_2
$Omron_expression_neg_pos_deg_2
$Omron_eyes_left_2
$Omron_eyes_right_2
$Omron_face_CoordX_2
$Omron_face_CoordY_2
$Omron_face_Count_2
$Omron_face_inclination_angle_2
$Omron_face_leftright_direction_2
$Omron_face_orentation_reliability_2
$Omron_face_Reliability_2
$Omron_face_verticle_angle_2
$Omron_gaze_LeftRight_2
$Omron_gaze_UpDown_2
$Omron_gender_2
$Omron_gender_Reliability_2
$Omron_hand_CoordX_2
$Omron_hand_CoordY_2
$Omron_hand_Reliability_2
$Omron_hand_Size_2
$Omron_Hands_Count_2
$Omron_recognition_score_2
$Omron_Recognized_Name_2
$Omron_user_id_2
A test project is included for testing 2 cameras: OmronHVC-P2Test.EZB
Configuration:
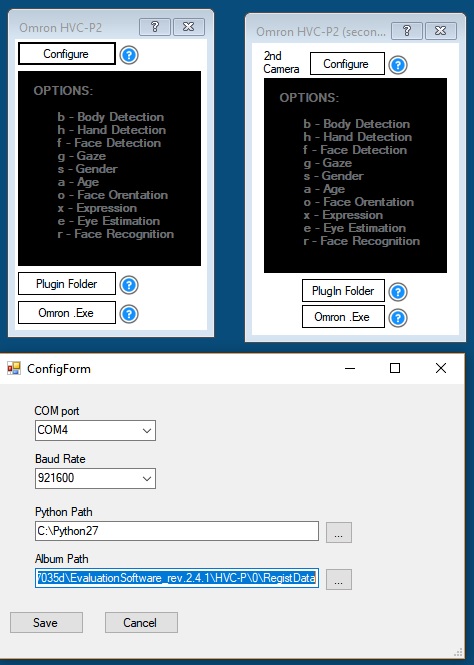
-You will need to configure for your camera for port, baud, Python folder and album folder for trained user faces. Once you save the configuration your settings will be saved for future use.
-The "Plugin Folder" button gives you a quick link to your plugin folder.
-The "Omron .Exe" button gives you a quick link to the Omron evaluation software which is used for testing the camera outside of ARC and training user faces. YOU CAN NOT USE THE CAMERA IN BOTH ARC AND THE EVALUATION SOFTWARE AT THE SAME TIME!!! You can only use the camera in one or the other.
Trouble Shooting: You might need to remove the plugin from your project and re-add before it detects your camera if you encounter an communication error on first run after an update to the plugin.
Source Code:OmronHVCP_Plugin_2ndCamera12.13.17.zip
3D Printer Files: HVC-P2 Case from Boris David Cochran's HVC-P case Pt1 David Cochran's HVC-P case Pt2 David Cochran's HVC-P case extrusion
Revisions Rev 5: 12.13.17 - correct variable for $Omron_user_id when nothing is detected the default will go to "500" which is not a possible user ID value instead of "0" which the default value for the first trained user ID.
Also added feature so all of the Omron variables inside ARC are set to natural states if the camera can not be communicated with it. Previously the variables were not being cleared.
Rev 4: 12.11.17 - added feature for album path for trained user faces from the Omron evaluation software can be added manually and saved as a setting. You must set the path now. The feature was added because the album paths between cameras and even firmware revisions are not all the same.
Rev 3: 12.4.17 - corrected variable swapped for hand/face coordX

