
Configurable Chromium browser skill for ARC: navigate URLs, print, open in PC browser, maximize/restore, set page content to a global variable.
How to add the Chromium robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Display category tab.
- Press the Chromium icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Chromium robot skill.
How to use the Chromium robot skill
Full-featured Chrome web browser robot skill that can be configured using control commands.
Main Window
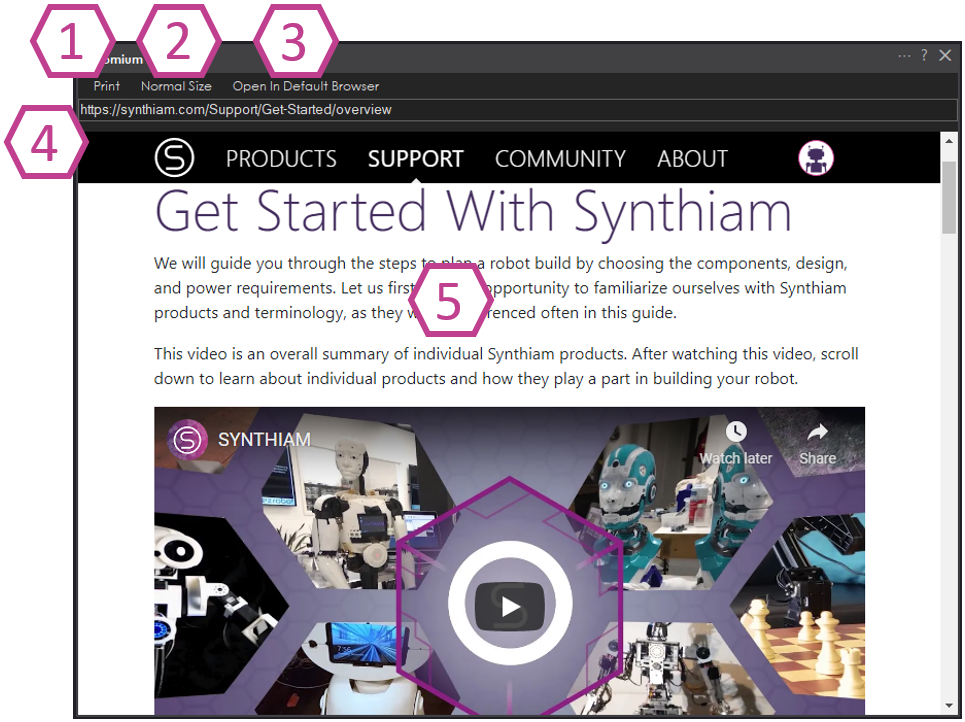
Print the current page
Maximize or restore the window state
Open the current page in the PC default browser
The current URL or enter a custom URL (press enter to browse)
The web content
Config Window The config window, which displays settings that can be configured for the robot skill's behavior, can be accessed by pressing the three little dots on the skill's top left menu.
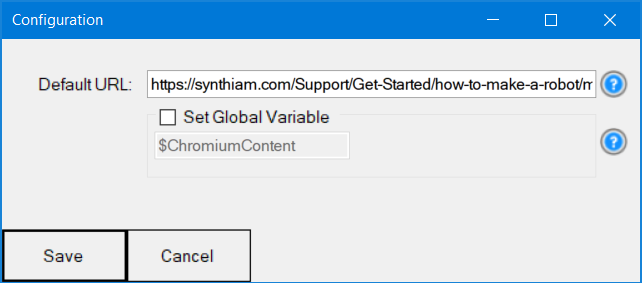
Default URL: The default URL that will load when the project is loaded
Set Global Variable: This checkbox will specify if the global variable is set with the contents of the loaded page. The global variable will be $ChromiumContent by default. You can edit that variable when this checkbox is set in the field below it. If this option is enabled, the robot skill should wait until the page is loaded before setting the variable which means it will block the ControlCommand call. However, because the chromium browser is developed by a third party (google), this functionality may change because they don't want bots to be created with it. So if you find the variable is not being updated with the latest page data, you may have to sleep() to wait an amount of time and cross your fingers that the page has loaded and the variable is set.
ControlCommands
A ControlCommand for this robot skill allows the URL to be specified and viewed. View the Cheat Sheet for easier access to this command.ControlCommand("Chromium", "NavigateTo", "URL") Specify the name of this robot skill in your project (i.e. chromium) Specify the URL to navigate to.
ControlCommand("Chromium", "WindowMaximize") Maximizes the robot skill window into the virtual desktop that it resides in.
ControlCommand("Chromium", "WindowNormal") Restores the window to a normal size within the virtual desktop that it resides in.

Interesting. So can a robot that is controlled by a browser interface, be controlled using this. Example if it uses the typical keyboard controls can we then connect that to a movement panel?
If you’d like to control a robot from your web browser, use one of the two http controls:
http server: https://synthiam.com/Support/Skills/General/HTTP-Server?id=16082
http custom server: https://synthiam.com/Support/Skills/General/HTTP-Server-Custom?id=16126
@Nink, Were you thinking of controlling 3rd party web controlled robots like the Rovio? (I know, old bot, but it is one I have, and it is web based).
If you can figure out the web commands, you could use a custom movement panel. I haven't gotten the Rovio to work that way, but it uses Javascript, not simple HTML. It is probably doable by having the Movement Panel call scripts to run Javascript now that ARC supports it as a scripting language, but I haven't spent the time to try to figure it out.
In any case, I don't think that was the intent of this skill. This is more to allow your robot to display web pages. My use case is that I have a web cam with IR that I wanted to use in a robot, just for remote night vision (not using it for any detection events) and it works in a browser, but there is something strange with its mpeg header and it doesn't work in the ARC camera control (although again, DJ did some recent updates and I haven't retested).
Alan, the robot skill that you’d be interested in is Stream All The Video Sources: https://synthiam.com/Support/Skills/Camera/Stream-All-The-Video-Sources?id=20279
Hi @Alan,
I am going to connect a Quad A1 to Synthiam. (See the robot dog thread). Initially we were thinking of writing a driver for the Moteus but I figured since Josh has already written various gaits and motions all I need to integrate with them. On further inspection it looks like he supports a series of JSON commands that I can send to the robot. https://github.com/mjbots/quad/blob/main/mech/quadruped_command.h#L28
You can see an example of its use at: https://github.com/mjbots/quad/blob/main/mech/web_control_assets/js/app.js#L517
So I will be begging for support (As always) with help to get this working when the time comes.
deleted - posted in wrong thread
I was looking at the Chromium Skill and noted it can call up images from my PC. But the ControlCommand for setting the URL does not exist. If it did, I could use ShowDesktop() to show the Chromium Window with photo and text - see below:
Let me take a look at that later this evening for ya. I'm taking a bit of a break tonight, given that it's sunday evening