

Infrared indoor positioning for ARC robots: dual-camera tracks IR beacon, shows real-time heading, path and EZ-Script navigation variables
 Hardware Info
Hardware InfoHow to add the Indoor Positioning System robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Navigation category tab.
- Press the Indoor Positioning System icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Indoor Positioning System robot skill.
How to use the Indoor Positioning System robot skill
The indoor positioning system is a combination of Infrared (IR) light transmitter and a dual camera receiver. The IR transmitter is mounted on your robot, and the dual camera receiver is placed in a corner of the room. The dual camera receiver is made up of a camera that captures regular image data and another that only captures infrared light. You can mount the dual camera on a tripod so it can see the room with it's 100 degree wide angle lenses.
There are three variables created that return the current status of the IPS navigation and heading degrees of the robot. These variables in EZ-Script can be used to identify when the robot is navigating and what direction it is moving.
Main Window - Navigation
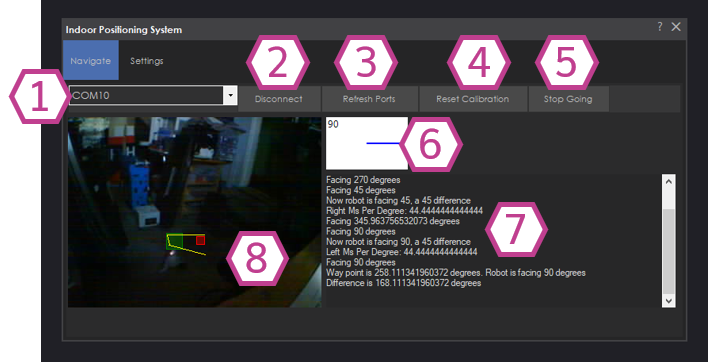
1. Device Drop-down Select the IPS COM port from this drop-down. If needed, use your Device manager to find the COM Port labelled "STMicroelectronics Virtual COM port".
2. Connect/Disconnect Button Connect/Disconnect this skill to the IPS hardware.
3. Refresh Ports Button Refreshes the device list in the drop-down.
4. Reset Calibration Button
5. Stop Going Button Stops the robot connected to the IPS from moving.
6. Navigation Direction Display Displays the direction the robot is headed in degrees and a visual line representation.
7. Status Display Displays the status of the IPS and connected robot in text form.
8. Realtime Visual Display Displays the detected IR transmitter (red box), the robots navigated path (yellow line) and the desired position to reach (green box)
Main Window - Settings
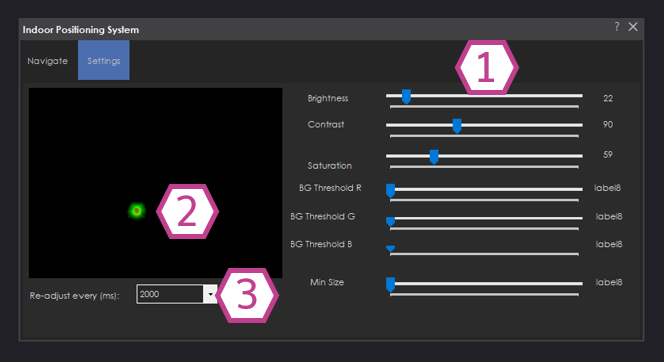
1. Image Adjustment Sliders These sliders adjust the Brightness, Contrast, Saturation, Color of the IR camera image. Use these slider to dial in the detected IR light. The Brightness, Contrast, and Saturation are the most important sliders to adjust. The Min size slider changes the detectable area the detected light must be, the larger the Min size, the large the IR light spot will be needed.
2. Realtime Infrared Light Display This is a realtime visual representation of the detected IR light. The display can change based of the image adjustment sliders and the amount of IR light being detected by the IR camera.
3. Delay Adjustment Drop-down This will change how often the robot will course correct when it attempts to move to the desired position.
How to Use Indoor Positioning System
Open the ARC project that corresponds to the robot you would like to control with the Indoor Positioning System. That ARC project must use a Movement Panel skill.
Connect to your robot.
Add the Indoor Positioning System skill (Project -> Add Skill -> Navigation -> Indoor Positioning System).
Connect to the Indoor Positioning System.
Set the Image Adjustment sliders in the Indoor Positioning System settings tab to dial in the detected IR light.
Back in the Navigation tab click on the Realtime visual display on the position where you would like your robot to navigate to.
Videos
Resources
Required USB driver: USB Virtual Com Port Driver.zipThe source files for the hardware are available here: github.com/synthiam/E-39_Indoor_Positioning_System
Related Questions

What Is Really Needed For Indoor Navigation?
Sharp IR On Car Robot, Table Top Robot Avoids Falling Off

Upgrade to ARC Pro
Synthiam ARC Pro is a new tool that will help unleash your creativity with programming robots in just seconds!
Hi Dj, I am happy to see you again present this IPS. I was wondering if or when this hardware may become available? I know your LIDAR device had manufacturing/supplier issues but this IPS will meet my needs. Thanks, Ron
Looks like it'll be on the EZ-Robot website for purchase end of March 2019. It's being manufacturered as i write this.
I Thanks Dj. Ccard ready....
Any updates on new products ?
You'd get a better answer by contacting EZ-Robot at https://synthiam.com/About/Contact-Us.aspx I'm not sure what their plans are for the IPS date.
In the meantime, you can find the hardware and firmware open source here: https://github.com/synthiam/E-39_Indoor_Positioning_System
Thanks for the update. I will check it out. Ron
Dj, Is there a tutorial or a way for me to look at how to use this plugin? I see the example videos, but no instruction or example script.
There is no hardware for this yet Andy.