
Connecting EZB Over Internet
A Wi-Fi or Ethernet-enabled EZB can be connected remotely over the internet. In these cases, a robot could be at your house or work and remotely controlled from a different location. Because most home/office networks have private IP addresses behind a security firewall, this feature will require configuring the router/firewall to forward a port. The port that most EZBs use by default is TCP 23. This process to enable remote client connections would require the TCP port 23 to be forwarded to the IP Address of the EZB device.
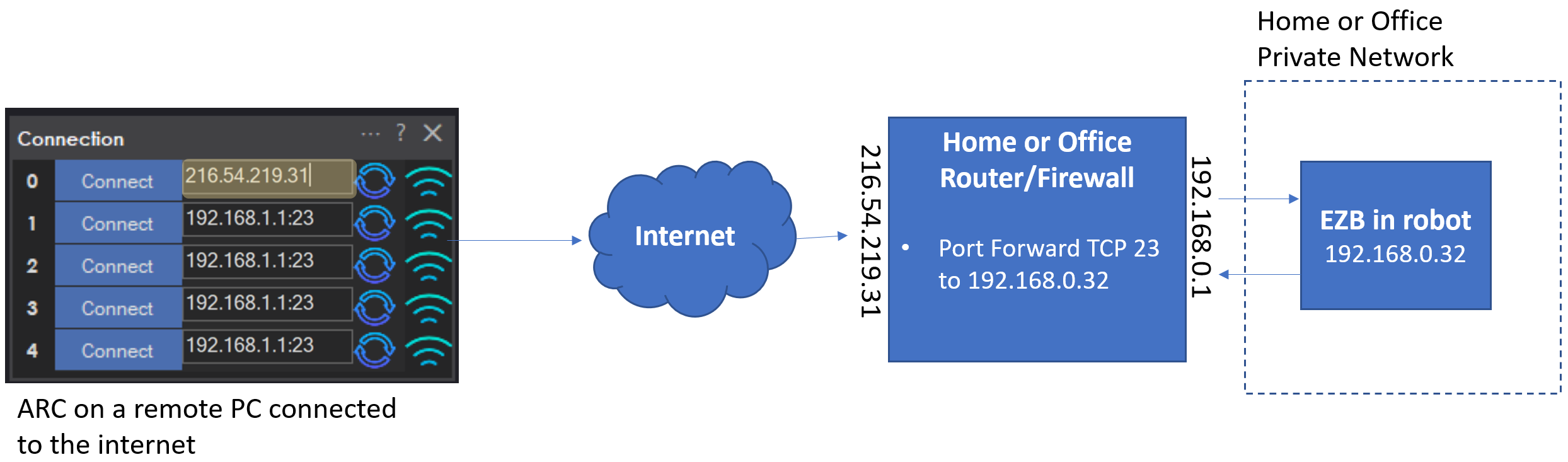
Here is an example diagram of how a remote connection would be configured to an EZB on TCP port 23.
EZB Listening (server) Port
Because EZBs can configure their listening (server) port, we mention TCP port 23 in this document, but it may be changed with the EZB configuration. Check the manual for the EZB type you're using to see how the TCP listening (server) port can be changed.
IP Address
In the remote ARC instance, you will need to enter the IP Address of the Office/Home router/firewall. This is because the office/home router/firewall will be the endpoint that ARC will connect to. That router/firewall will forward the connection data to and from the EZB. You can obtain your office/home router/firewall's IP address in a few different ways...
Get IP Address from Google - Using this method, use a home/office network PC and search in google for the words "What Is My IP?". You will be presented with an IP address. That is the IP address that the remote ARC instance will use to connect to the robot on the home/office network.
Dynamic DNS Server - Services like Dyn DNS allow entering the IP address that the hostname rather than the IP address can reference.