
Movement panel enabling Kangaroo & Sabertooth encoder-based speed/velocity control, UART/PC serial options, tuning and encoder setup.
How to add the Sabertooth Kangaroo robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Movement Panels category tab.
- Press the Sabertooth Kangaroo icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Sabertooth Kangaroo robot skill.
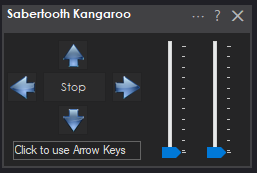
How to use the Sabertooth Kangaroo robot skill
Movement panel for the Kangaroo and Sabertooth from Dimension Engineering. This allows a robot with wheel encoders to be used, which enables the kangaroo's speed control and various other features.
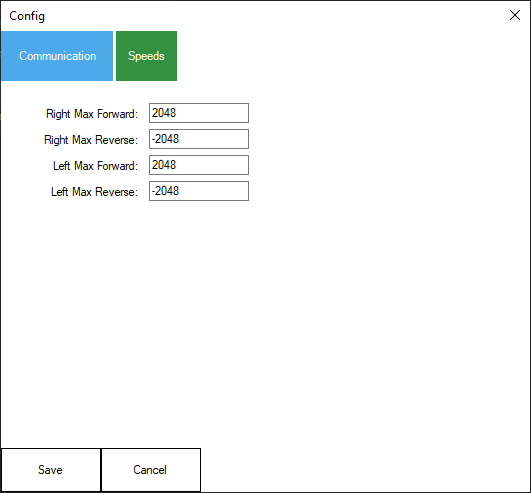
Configuration
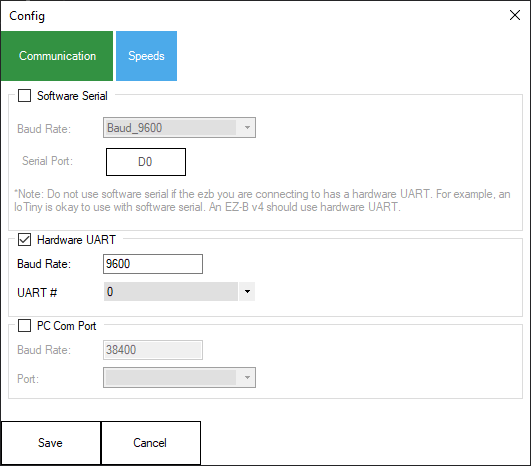
1. Software Serial Option Checkbox This uses any EZB digital I/O port to send an emulated serial signal to control the Sabertooth. This section includes a drop-down for the serial communication speed (baud rate) and a Button to change I/O ports. *note: Software serial should only be used if the ezb does not have hardware UART.
2. Hardware UART Option Checkbox This uses an EZB UART port to send a serial signal to control the Sabertooth. This section includes a drop-down for the serial communication speed (baud rate) and another drop-down to select the hardware UART number.
*Note: Use the ezb hardware UART if available over software serial. 3. PC COM Option Checkbox This uses a PC COM port (commonly a USB-to-Serial device) to send a serial signal to the Sabertooth to control it. This section includes a drop-down for the serial communication speed (baud rate) and another drop-down to select the COM port number. This option has the unique feature that allows you to connect the Sabertooth motor controller directly to a computer.
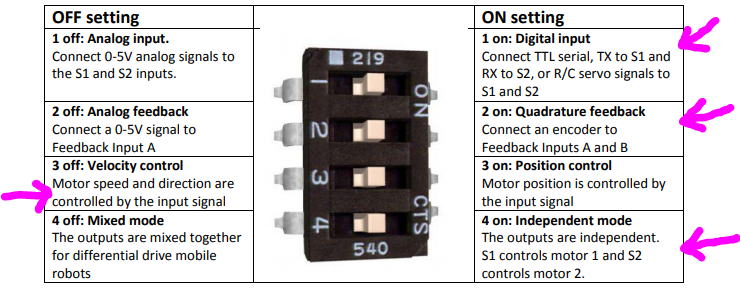
Kangaroo Dip Switches


Had one of these a while back and had a lot of problems. will dust it off and see if it is worth keeping.
I had a lot of problems setting it up the kangaroo with sabertooth for a movement - I don't know if it's worth the hassle depending on the robot chassis. If it's a custom chassis with decent quad encoders then it might be worth investing the time to get speed control.
You had a sabertooth or kangaroo or both?
When i tuned the encoders with their software, the values were totally wonky and different between each channel (left and right wheel). So i took the values from one wheel and copied them to the other. That actually ended up working.
Also, I had some issues with the encoder because the sensors weren't close enough to the wheel to measure ticks - so that's a thing.
Ya, the Kangaroo is a tricky device. The autotune is a little tricky if everything isn't just right. However once you get a successful tune it's rock solid and works great. I suggest you use the DeScribe software to tune with and not the onboard tune button.
Thanks dave - i used the DEScribe with the auto tune. I never bothered with the onboard tune button. Once I got the DESCribe auto tune to give me some values, I tweaked them.
It's working really well right now, actually. I wouldn't say it was great to start with though. Not sure if i'd use it again lol.
BTW, here's the thread of the problems I had with it: https://synthiam.com/Community/HackEvents/DJ-s-Test-Bots-TurtleBot-3-and-K-8-20483
Ya, it can be a real pain to get going. Depending on your setup it can be nightmarish or a breeze.
The Roboclaw is built just as nice with the same features. It also has an auto tune. I've never used it but I've always wanted to give it a try. Maybe it is easier to get a proper tune.
All I know is that if the tune was left to me I'd never get close to the proper PID, speed and dead-band settings. LOL. It's easier for me to struggle sometimes with a auto tune then spend days or weeks getting all those setting correct.
I checked your link to the problems you were having. What a nightmare. I shared a few ideas based on my experiences in that thread.