
3. EZB Microcontroller
When a generic I/O controller (Arduino, Microbit, etc.) is programmed with Synthiam firmware compatible with ARC, we refer to it as an EZB. The firmware then allows the EZB I/O controller to use additional capabilities available in ARC. An EZB connects sensors, motors, and peripherals to the computer.
What is an EZB Microcontroller?
a low-power device that allows sensors, servos, LEDs, and motor controllers to be connected. The EZB provides an interface between your computer and the
robot hardware. Popular EZB Microcontrollers are Arduinos or EZ-Robot EZB v4/IoTiny, etc. You will find a list of compatible microcontrollers below in this guide.
Each EZB will provide various hardware and custom commands. To identify the capabilities of an EZB, ARC provides abstract methods that represent the EZB's capabilities. For example, if the connected EZB supports a hardware UART, the respective EZB index in ARC will provide hardware UART commands. The Firmware Capability Manager determines the capabilities of each EZB. An EZB will report its capabilities to ARC. ARC will notify you if an unsupported command is issued to an EZB.
Natively Supported EZBs
Based on the type of computer selection (embedded SBC or remote PC), EZBs will support different connection types. For example, a connection type of USB requires the computer to be embedded in the robot. An EZB that has Wi-Fi supports a remote computer or embedded computer configuration.

The Arduino Mega 2560 is an excellent high-I/O microcontroller for robotics and automation projects. With this firmware, the Mega becomes an...
Connection: USB
The Arduino / Genuino Uno is a small microcontroller board based on the ATmega328P. A microcontroller is like a tiny computer that can read...
Connection: USB
The Arduino Leonardo can be programmed with the EZB firmware for various capabilities when connected to ARC. Find the firmware below. The...
Connection: USB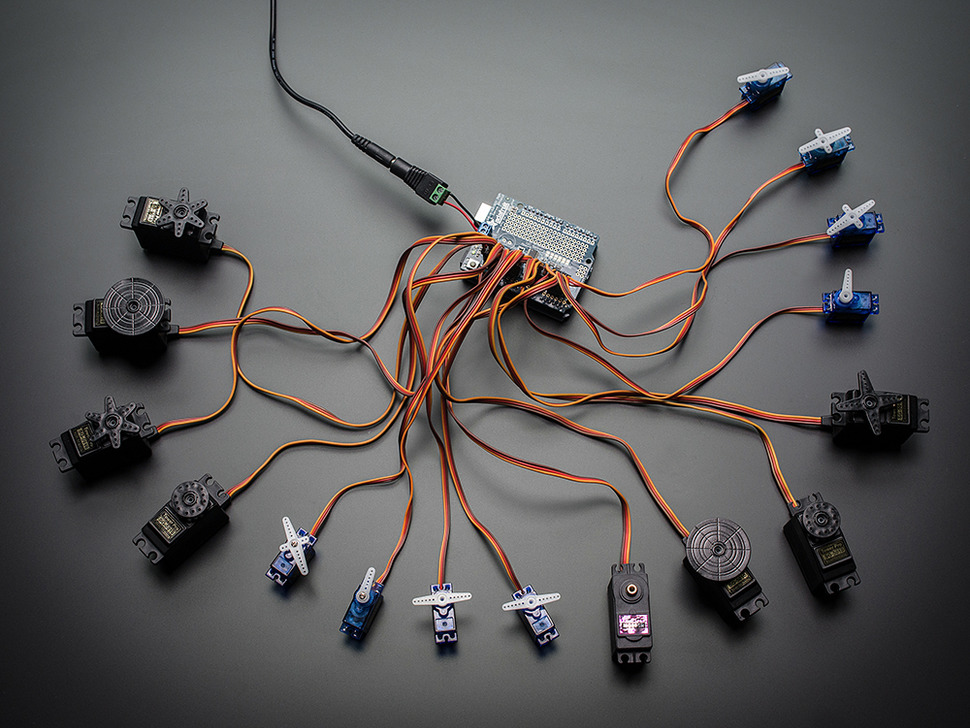
This configuration is deprecated, and it is recommended to use any Arduino/ESP32/etc firmwares with the PCA9685 Robot Skill...
Connection: USB
The ESP32 is a small, low-cost microcontroller without a camera onboard. Think of a microcontroller as a tiny computer whose job is to...
Connection: Wi-Fi
The ESP32-CAM is a small, affordable WiFi microcontroller board that includes an onboard camera and enough GPIO to control simple robotics...
Connection: Wi-Fi
Connect Something! The EZ-B IoTiny (often called "IoTiny") is a tiny WiFi robot and IoT controller in the EZRobot family. Think...
Connection: Wi-Fi / USB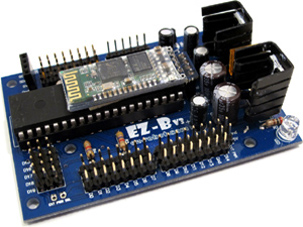
About this hardware: The Synthiam / EZ-Robot EZ-B v3 Bluetooth Robot Controller was introduced in 2011 and discontinued in 2013 when it was...
Connection: Bluetooth
The Synthiam EZ-B v4/2 (often called "EZ-B v4") is the main controller (the "brain") for a robot or IoT project. It’s...
Connection: Wi-Fi / USB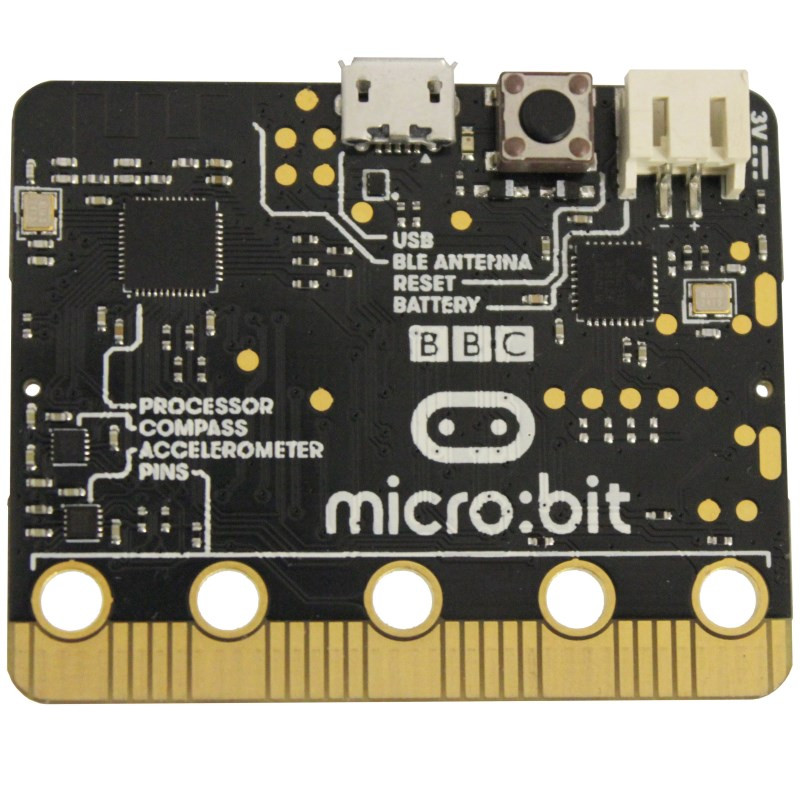
The BBC micro:bit is a small, beginner-friendly microcontroller board (a tiny computer on a circuit board) that was created for teaching...
Connection: USB
The Robotis OpenCM 9.04 is a small, open-source microcontroller board that can be used as an EZ-B compatible interface for Synthiam ARC...
Connection: USB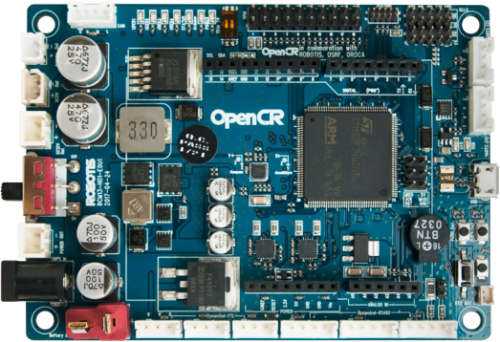
What this is: OpenCR 1.0 is an open-source robot controller (microcontroller board) with a powerful ARM processor. With the correct firmware...
Connection: USB
Don't see your hardware listed?
Add any robot product, hardware, PLC, or microcontroller to the Synthiam-supported EZB list. We have published the EZB communication protocol for anyone to use.
EZB Communication Protocol Details