

Connects Ohmnilabs Telepresence robot's UP Board COM to ARC, enabling drive and servo control (neck V0) and integration with ARC cameras.
How to add the Ohmnilabs Standalone robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Movement Panels category tab.
- Press the Ohmnilabs Standalone icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Ohmnilabs Standalone robot skill.
How to use the Ohmnilabs Standalone robot skill
This skill connects the Ohmnilabs Telepresence Robot servo/wheel hardware with ARC. Windows must be installed on the robot's internal UP Board so that ARC can run. This skill connects to the Ohmnilabs bus through the COM port that's detected.
Prerequisite - Installing Windows 10
The Ohmnilab robot comes with an Intel Up Board as the SBC (Single Board Computer). In order to run ARC and all of the available skills, Windows 10 x64 (64 bit) operating system needs to be installed on the UP board inside the Ohmnilabs Telepresence robot.- Windows 10 x64 (64 bit) operating system installation instructions for UP Board: https://wiki.up-community.org/Setup
2) Windows 10 FT230x Driver. This is required for the communication interface between the Up Board and the Ohmnilab communication protocol/hub. Install 64bit version: https://www.ftdichip.com/Drivers/VCP.htm
3) Windows 10 download for UP board: https://downloads.up-community.org/download/up-board-windows-10-installation-guide/
Additionally, watch DJ's Live Hack page for installing Windows on a UP Board: https://synthiam.com/Community/HackEvents/Intel-Up-Board-as-a-robot-controller-19435
More information about the Ohmnilab telepresence robot can be found here: https://synthiam.com/Docs/Hardware/Ohmnilabs-Telepresence-Robot
Neck Servo
The neck servo is controlled over port V0 in ARC. This allows tipping the screen/neck up and down.Windows Installation Tips & Performance
We have a guide in the Support section that includes steps on freeing storage space and increasing the performance of robot computers, such as single-board computers. View the instructions HERE.Main Window
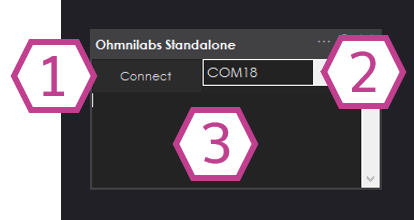
1. Connect/Disconnect Button This button connects or disconnects ARC to the UP Board.
2. Device Drop-down This drop-down selects a COM port installed on the UP board. Use your device manager to find the proper COM port if needed.
3. Status Display Displays in the text the communication between ARC and the UP Board.
Configuration
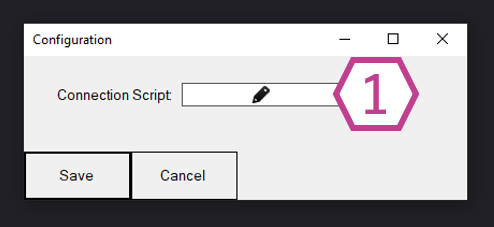
1. Connection Script This allows you to execute a script when ARC connects to the Robot.
How to use Ohmnilabs Standalone
Add the Ohmnilabs Standalone to your ARC project (Project -> Add Skill -> Movement Panels -> Ohmnilabs Standalone).
Select the Ohmniabs robot's hardware COM Port.
Press the Connect Button.
Use additional skills to control the Ohmnilabs Telepresence robot and add features (movement panel, camera, etc.).
