

Capture a robot skill's display and stream selected area as video to a configured camera device with FPS and live preview crop.
Requires ARC
v5
(Updated 7/5/2022)
Compatible with:
 Windows
Windows
How to add the Robot Skill To Camera robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Camera category tab.
- Press the Robot Skill To Camera icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Robot Skill To Camera robot skill.
How to use the Robot Skill To Camera robot skill
Capture the output display of a robot skill and send it to a camera device. Specify the robot skill to capture, and it will send the video to the selected camera device.
The Ultrasonic Radar Scan area is captured in this screenshot below and sent to the Camera Device as a video stream.

Usage
- You will need a camera device added to the project. Select the camera device from the configuration menu.
- In the camera device, select the Custom option in the device list. Then press the start button.
Configuration
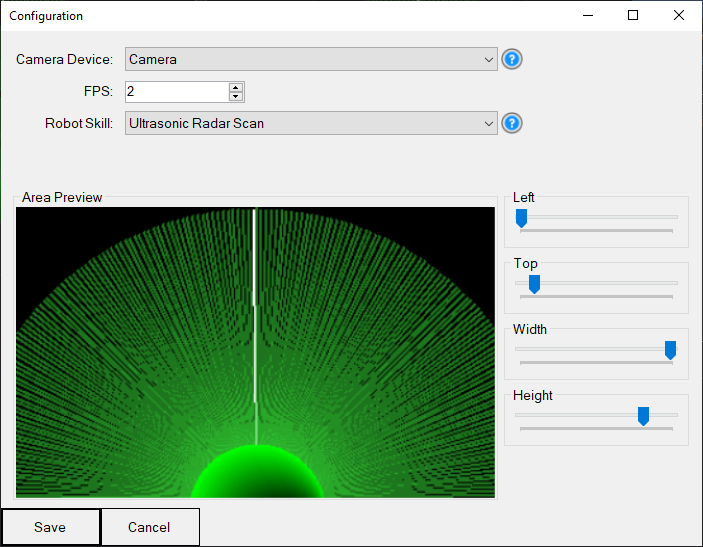
Camera Device
- The camera device that the video capture will be streamed to.
FPS
- The frames per second rate that the video will be captured. A lower frame rate will reduce CPU usage.
Robot Skill
- The robot skill in capturing the stream from
Area Preview
- This is the preview of the video stream that will be sent to the camera device. Use the Left/Top/Width/Height sliders on the right to fine-tune the capture area.
Related Questions
question

Looking To Improve Face Tracking Esp32 Cam
Looking for some advice on face tracking. My setup is using a esp32 Cam. It's connected to ARC via wifi. I have an...
question
Color Tracking
When I tray color tracking, like shown at YouTube, the robot will not speak. How can I get him to say, for example:This...
question

ESP32-CAM NMS Pose Yaw Flips
I’ve got an ESP32-CAM (AI Thinker) flashed with the Synthiam ESP32-CAM firmware (set to Client Wi-Fi) mounted overhead...

Upgrade to ARC Pro
Subscribe to ARC Pro, and your robot will become a canvas for your imagination, limited only by your creativity.
I again, have encountered 2 problems.
Skill robot skill To Camera:
Skill Screen To Camera:
This is the case for both skills
.
What is your fps set to?
in the videos 10, but I also tested it with 1 or 2, same behavior
Does it do it at a lower fps?
yes also at 1 or 2 fps ...
Interesting... I cannot seem to reproduce it. It might be catching the redraw of the radar image but I can't be certain. I'll have to think about this one...
Oh, another thing. If your radar is set for a 250ms (default value) for scan speed, you can use an FPS of 4. That would save some CPU because the radar only updates ~4 times a second.
bad shaky video :-) 1, 2 and 5 fps
Have to install a screencapter program for videos :-) (Edit, hmm, Screen Recorder, ahhh .....)
As long as EZ-B is off, nothing wobbles... yes, I have less than 250ms, I have to check, I'll keep testing...