H.Berserk

Strange Issue With Servo Speed/Delay/Steps And Usb Camera
Hi everyone, I have been following you for some time and first of all I wanted to thank this forum and the fantastic Ez Robot because you have allowed me to learn many things. I started building a hexapod around an ez board v4 and I played a bit with AutoPosition but I have a strange problem with the speed of the servos. When I turn on the ez board v4 for the first time I have to turn on the PC camera even for a second and then turn it off otherwise the movements are slow, I don't understand why I didn't set anything in the camera device. I tried to turn on the ez camera instead of the camera pc but the movements remain slow. Same problem with the mobile app. I thought of resetting all the movements without ever turning on the pc camera, but maybe I'm missing something? I inserted a video that maybe will explain better than my English "google".
Related Hardware (view all EZB hardware)

Related Robot Skills (view all robot skills)



Can you slide the Auto Position speed control down and up again rather than starting the camera control? Will that fix it? I'm wondering if the speed isn't being initialized.
You can force a speed initialization in the connection control with these steps...
Press the GEAR icon on the connection control to open the settings window
press the pencil icon to edit the script for "0 - Connection Established Cmd"
Paste in this initialization code...
Hi Dj Sures, thanks for the reply. Sorry I forgot to mention that I had already set up an init script.
And I also tried to move the speed slide before starting the USB camera but it doesn't solve the problem. I Had also tried to add in the init script servospeed (Dxx, 0) for each servo but it does not work. I also tried a new project and I imported the AutoPosition frame and action and init script but it doesn't work. Today I made the last attempt I installed ARC on another PC but it does not work until I turn on the USB camera... Maybe at the hexapod likes to see my face from PC before walk fast..That's really interesting - I'll have to take a look and see if it can be replicated on my end. Would you mind sharing your project with me? Use the FILE attach button on this editor to attach the EZB file.
Thanks for the help DJ Sures. I am attaching the project file. Hexapod Backup.EZB
Try this beta release: https://synthiam.com/Software/Release/Beta-Release-2019-04-09-00-17970
Wow DJ Sures You're really fantastic and professional! I tried the new Beta release, I created a new project and I imported only AutoPosition Frame/action and Init script but we were unlucky. It does not work yet until I add camera device and start for a second the USB camera. I do this.. I never ever ever ever start USB camera in my project and i fix delay/step/speed of each movement. Easy! But I want to thank you and I would like to take the opportunity to ask you another question.
I created a variable to change the speed of each frame/action because I saw that Fast Movement Modifier is present only on "Forward(), Left(), Right(), Reverse(), Stop() " and SetSpeed() don't work on the others Actions.
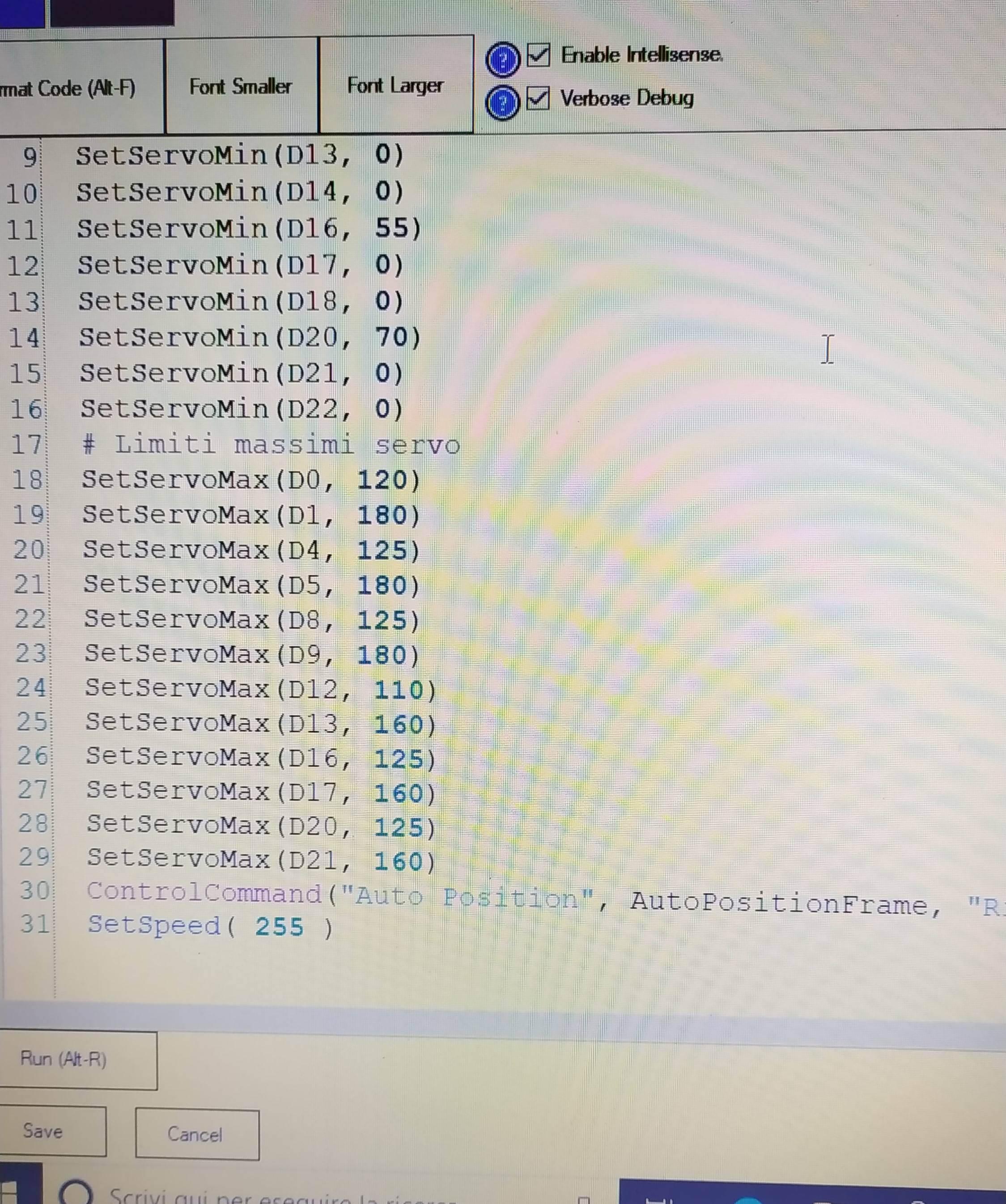
This is the variable i start in a init script:
But I want to thank you and I would like to take the opportunity to ask you another question.
I created a variable to change the speed of each frame/action because I saw that Fast Movement Modifier is present only on "Forward(), Left(), Right(), Reverse(), Stop() " and SetSpeed() don't work on the others Actions.
This is the variable i start in a init script:
after i create a action :
Now how do I stop the script " strafe right" when I change action? Because just it finishes the new action, "Strafe Right" starts from where it had remained. I tried to use the If/ElseIf/else and Waitforchange() / waitfor() functions but I couldn't fix it.. The script stays paused but then starts again on its own. Sorry for the beginner question.
I’ll continue looking into the speed issue. Adding the usb camera may work but it’s not a viable solution.
as for your second question... I think it makes sense for the speed modifier to apply to all actions. I’ll have the software updated for that. Stay tuned!
Perfect!! cool Thanks DJ Sures!