

T265 VSLAM for ARC: SLAM-based mapping and precise way-point navigation, low-power tracking, and NMS telemetry.
 Hardware Info
Hardware InfoHow to add the Intel Realsense T265 robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Navigation category tab.
- Press the Intel Realsense T265 icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Intel Realsense T265 robot skill.
How to use the Intel Realsense T265 robot skill
With its small form factor and low power consumption, the Intel RealSense Tracking Camera T265 has been designed to give you the tracking performance for your robot. This ARC user-friendly robot skill provides an easy way to use the T265 for way-point navigation.
The T265 combined with this robot skill provides your robot a SLAM, or Simultaneous Localization and Mapping solution. It allows your robot to construct a map of an unknown environment while simultaneously keeping track of its own location within that environment. Before the days of GPS, sailors would navigate by the stars, using their movements and positions to successfully find their way across oceans. VSLAM uses a combination of cameras and Inertial Measurement Units (IMU) to navigate in a similar way, using visual features in the environment to track its way around unknown spaces with accuracy. All of these complicated features are taken care of for you in this ARC robot skill.
Update Firmware The device sensor may require a firmware update.
Visit the Realsense GitHub page, scroll to the bottom of the page, and install the Intel.Realsense.Viewer.exe from here: https://github.com/IntelRealSense/librealsense/releases/latest
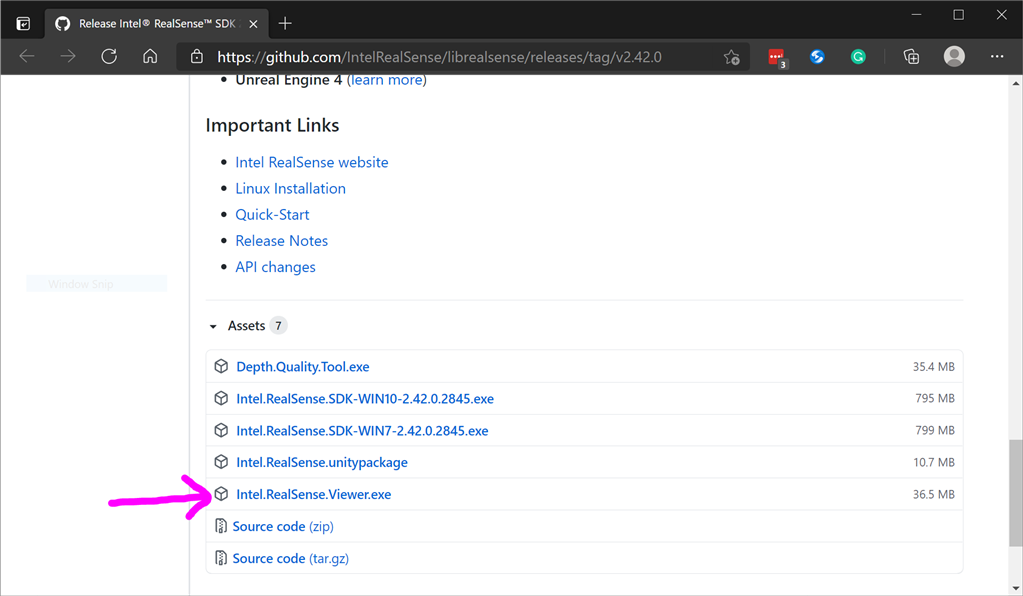
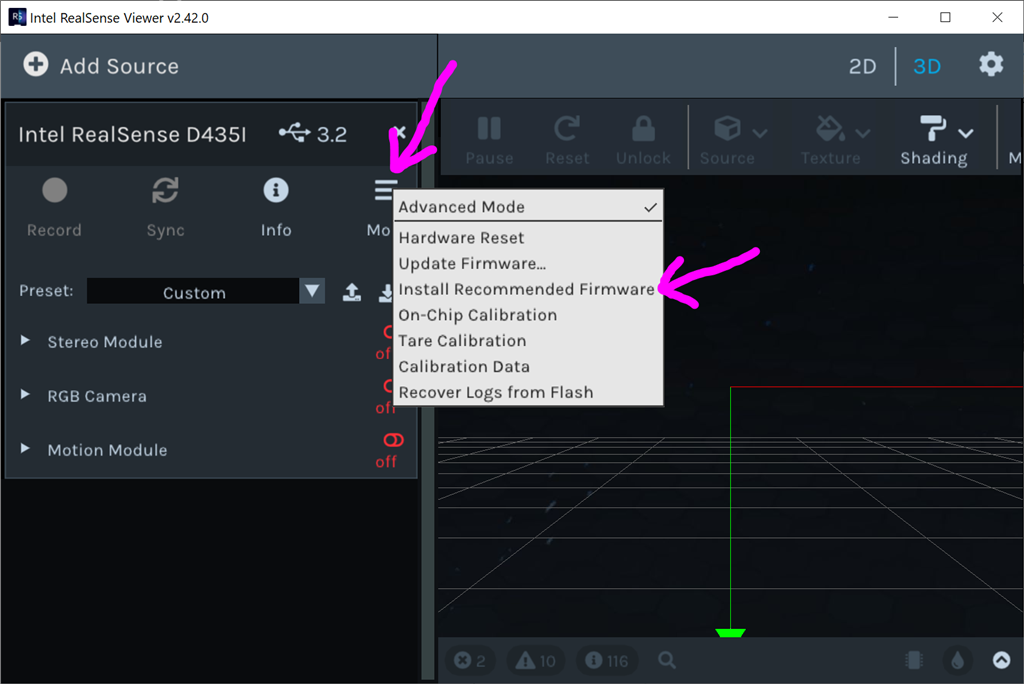
Click the hamburger settings icon and select Install Recommended Firmware
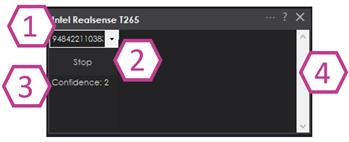
Robot Skill Window The skill has a very minimal interface because it pushes data in the NMS and is generally used by other robot skills (such as The Navigator).
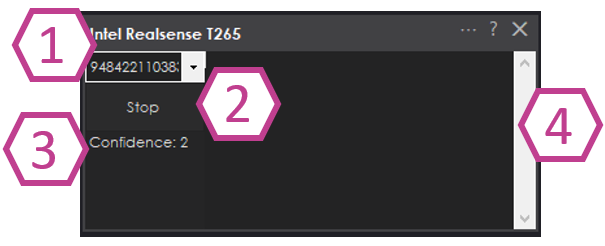
Drop-down to select Realsense device by the serial number. This is useful if there are multiple devices on one PC.
START/STOP the Intel T265 connection.
The confidence of the tracking status between 0 (low) and 3 (highest). In a brightly lit room with many points of interest (not just white walls), the tracking status will be high. Tracking will be low if the room does not have enough light and/or detail for the sensor to track.
Log text display for errors and statuses.
Config Menu
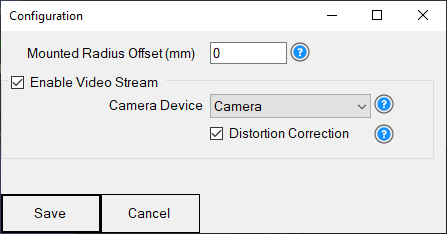
1) Mounted Radius Offset (mm) is the distance in mm of the T265 from the center of the robot. A negative number is toward the front of the robot, and a positive number is toward the rear. The sensor must be facing 0 degrees toward the front of the robot. The sensor must not be offset to the left or right of the robot.
Enable Video Stream will send the fisheye b&w video from the T265 to the selected camera device. The selected camera device robot skill must have Custom specified as the input device. Also, the camera device will need to be started to view the video.
Distortion Correction will use a real-time algorithm to correct the fisheye lens, which isn't always needed and is very CPU intensive.
Video Demonstration Here's a video of the Intel RealSense T265 feeding The Navigator skill for way-point navigation
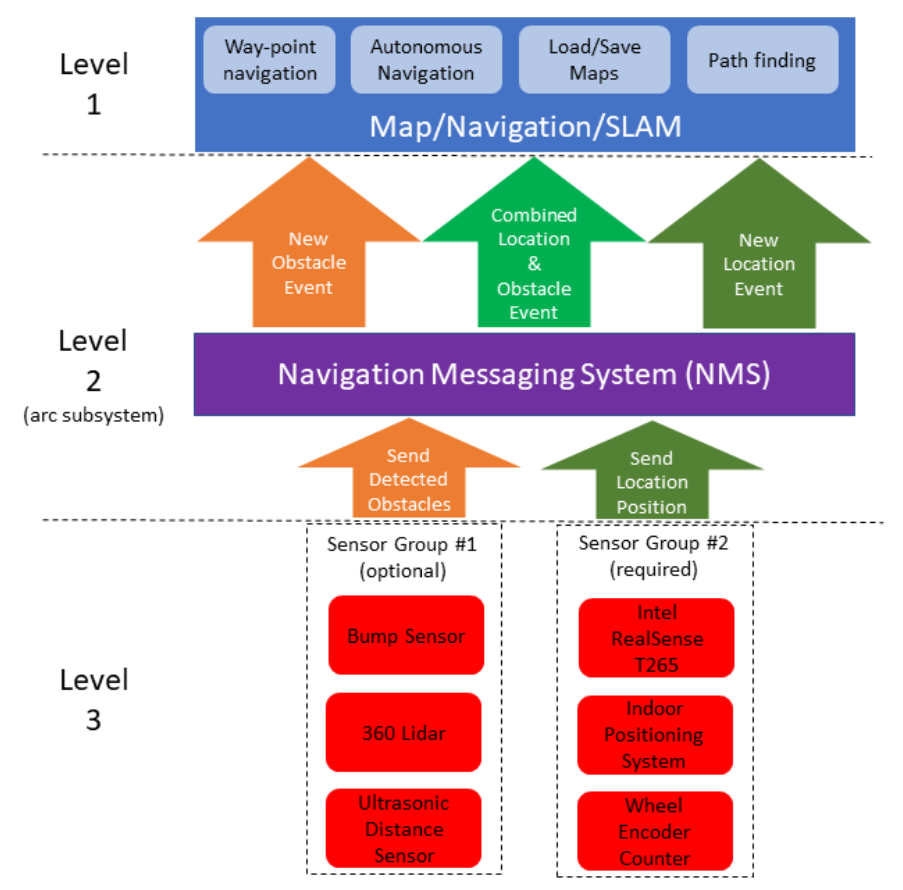
ARC Navigation Messaging System This skill is part of the ARC navigation messaging system. It is encouraged to read more about the messaging system to understand available skills HERE. This skill is in level #3 group #2 in the diagram below. This skill contributes telemetry positioning to the cartesian positioning channel of the NMS. Combining this skill with Level #3 Group #1 skills for obstacle avoidance. And for Level #1, The Navigator works well.
Environments This T265 will work both indoors and outdoors. However, bright direct light (sunlight) and darkness will affect performance. Much like how our eyes see, the camera will is also susceptible to glare and lack of resolution in the dark. Because the camera visual data is combined with the IMU, the camera must have reliable visible light. Without the camera being able to detect the environment, the algorithm will be biased to use the IMU and will experience drift, which greatly affects the performance of the sensor's accuracy.
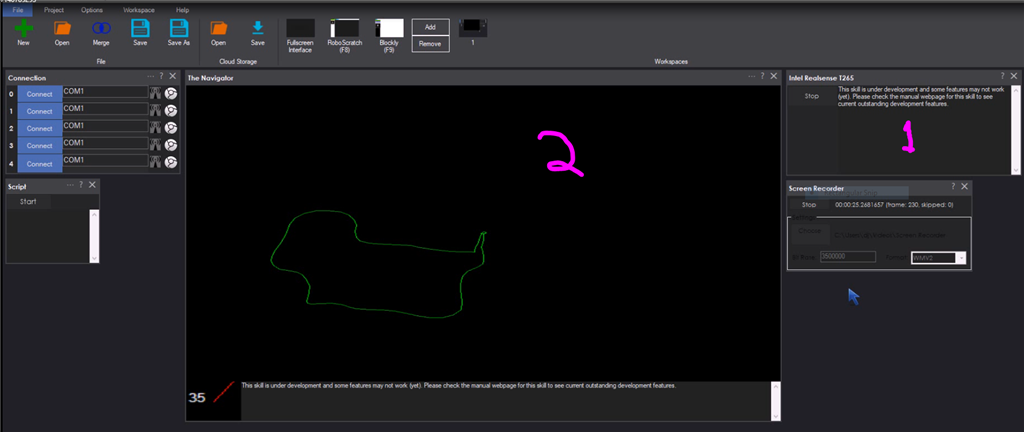
Screenshot Here is a screenshot of this skill combined with The Navigator in ARC while navigating through a room between two way points.
Starting Location The T265 does not include a GPS/Compass or any ability to recognize where it is when initialized. This means your robot will have to initialize from a known location and direction to reuse saved maps. Make sure you mark the spot on the ground with masking tape where the robot starts from.
How To Use This
Connect your Intel RealSense T265 camera to the computers USB port
Load ARC (version must be >= 2020.12.05.00)
Add this skill to your project
Now we'll need a Navigation skill. Add The Navigator to your project
Press START on the Intel RealSense skill and data will begin mapping your robot's position
How Does It Work? Well, magic! Actually, the camera is quite interesting and it breaks the world down into a point cloud of features. It remembers the visual features so it can re-align itself on the internal map. It uses a VPU, is what Intel calls it. Here's a video of what the camera sees.
Related Hack Events
A Little Of This, A Little Of That

DJ's K8 Intel Realsense & Navigation
Related Questions
T265 Realsence Viewer.Exe On An Upboard

Navigator With Mecanum (Omni) Wheel Robot Platforms
Questions Regarding Navigation
In The Better Navigator No Movement From The T265

Upgrade to ARC Pro
ARC Pro will give you immediate updates and new features needed to unleash your robot's potential!
Wow that is what you were working on earlier!:D
Updated for maps to grow as necessary
That's great. Perhaps what I wrote earlier can just attach to this...if there is any value add left. This may render my musings moot I guess. I wish I had known (story of my life)...would not have spent time on it if the skill was a done deal.
Does this skill provide an API to the map? If so, 2D or 3D? So curious.
Updated to fix a bug with the growing map
Martint, there will be access to the map in a few more versions. Stay tuned... I'm adding things as we go over the next few days. However, accessing the map is somewhat irrelevant because you merely specify where you want the robot to go and it uses what ever Movement Panel that is added to take you there.
Movement panels allow any robot to move by any other skill. So it takes control - that's how ARC works. The robot can be a drone, humanoid with gait, hexapod with gait, hbridge, continuous rotation servos, etc, etc, etc... it doesn't matter. It just goes.
This isn't the place for that conversation, however. But you can read what a Movement Panel in the support section here: https://synthiam.com/Support/ARC-Overview/movement-panels
Thanks. I get it on the movement, and why it is somewhat irrelevant for that, especially inside a single open room.
I am very interested in the map for other reasons...so I will stay tuned. Here is one below. This is more of a nav thing so I'll go read what you guys have on that too.
If you are moving from point A in a Bedroom to point B in a Living Room...there are obstacles between A and B, both known (walls, doors, hallways, furniture, etc.) and unknown (people, pets, laundry), that come into play. The map presumably is or will play a central part in this. Obstacle detection is already in other skills. Fusing a bunch of disparate obstacle detection sensors is another piece (I use 3 types). Pathfinding is a piece too....and pruning the path down...eliminating all the useless points in the middle of a path to find sensical free diagonals. I personally like to layer some kind of force field on too so the bot will drive more reasonable paths down the center of open space (like hallways) instead of driving the shortest path (like pathfinding algos usually provides). To me, the best path is not the shortest, but the easiest. This obviously can be done by modifying the terrain cost around everything bad before the pathfinding does its path.
Anyway...to anyone out there, which parts of this still need skills if any or is it all already there? I suppose I could have left out some skills in that process that you guys have encountered. I don't want to pest and will put a cork in it and RTFM if that if that is the etiquette preference here, just hint away.
That looks promising. What approach are you thinking of taking regarding the map if any? I was thinking it would be cool to drive around to create the map with a tof sensor like the VL53L0X cheep laser. What do you guys think?
Another idea. Simple DIY lidar that for our needs is enough:
Hi proteusy...when you mentioned something looking promising...were you referring to the skill DJ is working on or something in my last post? Sorry...had to be the skill, my bad.