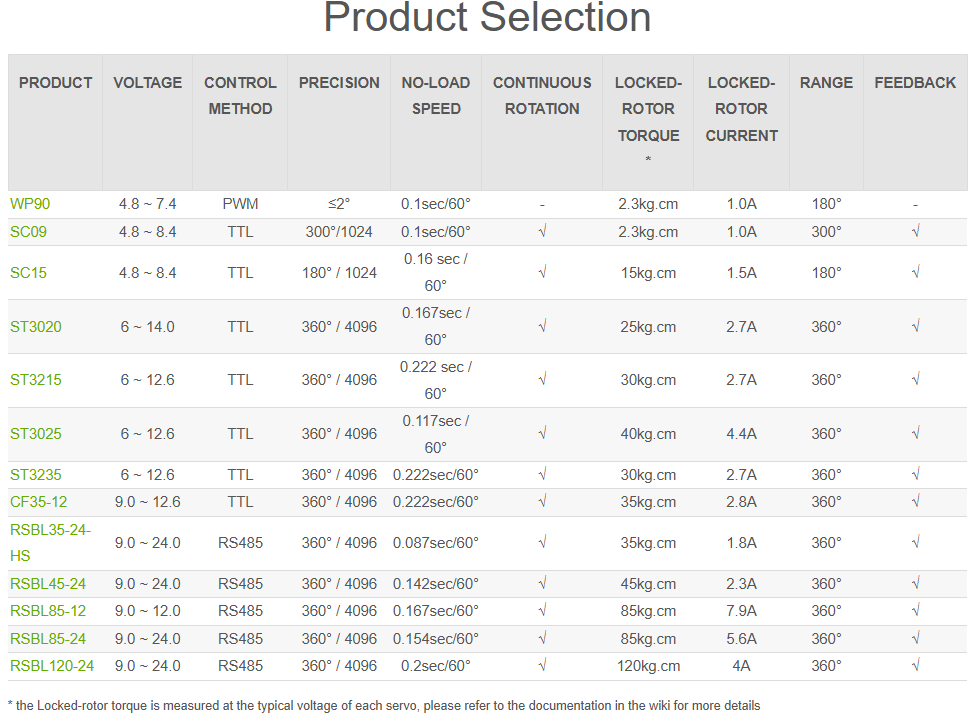
Control Waveshare servos (TTL/RS485): set position & speed, release torque, read position. RTS option for converters; reverse-engineered protocol.
How to add the Waveshare Bus Servos robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Servo category tab.
- Press the Waveshare Bus Servos icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Waveshare Bus Servos robot skill.
How to use the Waveshare Bus Servos robot skill
This is a test to control waveshare bus servos with TTL or RS485. The buttons will perform different actions on a servo with ID #1.
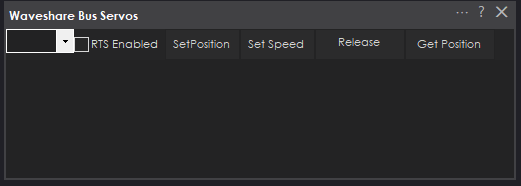
The RTS-enabled option may need to be used for some serial converter controllers. Try with and without this option checked.
The Set Position will move the servo. Make sure nothing is attached to the servo; otherwise, it will move and break whatever you have attached. This moves between positions 250 and 750, so make sure it's free to move.
Set Speed will move the servo at a slow speed of 300. I have no idea how slow it moves it. But if you see it move slowly then it's working
Release will release the servo so that it can be moved by hand. Press this button before using the Get Position button, and the servo will be able to be moved by hand
Get Position will display the current position of the servo
The Waveshare has no protocol information on its website. They have a wiki containing product specifications and links to Arduino/python modules (for only some products). This robot skill is my attempt at reverse engineering their protocol. This is a link to their wiki: https://www.waveshare.com/wiki/Main_Page#Robotics-drivers-sensors