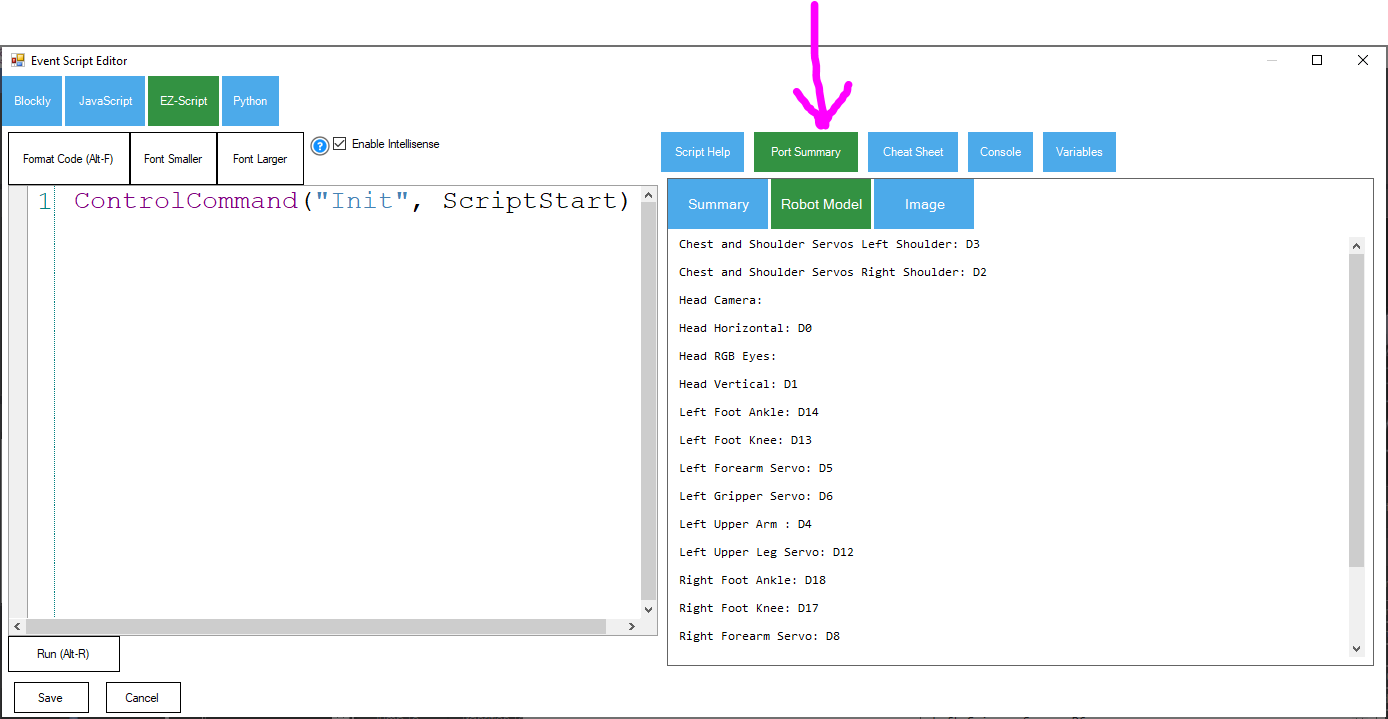
Port Summary
The following tab from the Script Manual page is the Port Summary. This page displays how the ports of the EZ-B are being used. The summary is manually entered in the Project Details section. Creating a port summary helps you know what is connected to the EZ-B ports. You will define what is connected to each port, for example, Left Arm Servo or Right Leg Servo. Configure the port summary with either the robot project's Robot Designer or Properties tab. These are located in the My Robot top menu under Project.