Andy Roid
What Is Really Needed For Indoor Navigation?
I have read about many ways to develop Indoor Navigation. The Hardware recommended varies from an IPS system to a Lidar based system, even straight scripts, the use of cameras, Encoders and maybe even a compass. There are simple methods given in tutorials but they are not the "real" navigation wanted. Total confusion is what I end up with. I can see the validity of each device and even combinations of devices with added safety sensors such as drop off sensor, bumper sensors etc. Sophistication is needed but I end up with Mystification.
My main question is what works, is needed and makes sense? Anyone want to discuss this subject?
I know there are many who want to build the base for an Imoov or their favorite robot build or just get an Adventure Bot to travel throughout the house using a single verbal command. I would.
If Dj wants to do a Hack Night on this subject I think many would be interested.
Related Hardware (view all EZB hardware)

Related Robot Skills (view all robot skills)






Order this Oculus ROV, learn ROS so we can all be done discussing this because ez robot's hardware for this simply isn't coming. And only .01% of the people on here are smart enough to create something like this.... Heck most of people on here can barely program anyway so an "out of the box" solution is not looking good... No offense. I think you are "beating a dead horse"
I am happy to eat crow sandwich if ez robot proves me wrong, but I am not holding my breath
Is yours working well?
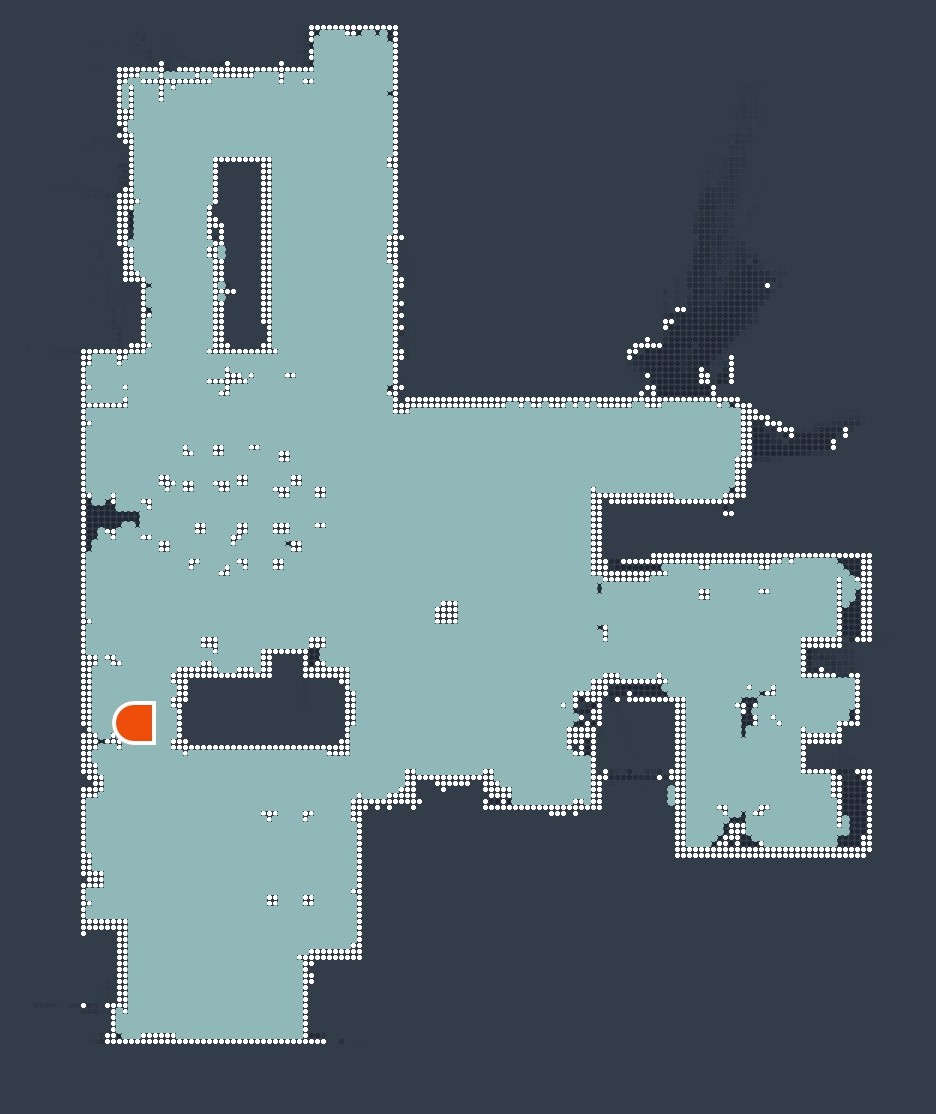
Yep (but I didn't buy it, someone I know did) ... I used it for stem lessons and it preformed very well at room mapping, auto charging, and of course navigating... You want the slam navigator version... You are also going to need to know a little linux as ROS runs in that environment...
Ok that is option 1 I will look further into it's functionality to see how it works and what it uses. (Lidar etc.) I am not ready to send the $ 1,500.00 yet.
What else can be done using more familiar devices like I mentioned? Even if it is less sophisticated.
All you need is a fixed laser and wheels with encoders. See this video: https://www.youtube.com/watch?v=tUm6MRGYam8 Synthiam could do this easy. The oculus rov uses this camera. It is worth the 149 dolars: https://shop.orbbec3d.com/Astra-Pro_p_35.html
That’s the point of synthiam, Richard. A high percentage of users, including yourself cannot program with ros. That’s because it’s not sustainable for an industry to require c++ engineer programmers. Although, anyone who argues that would fit right in with the 1970’s Unix hippies
i can’t speak for Ezrobot, but I imagine the lidar and ips do not align with their target market. That being said, all synthiam reference design hardware is open source and there’s a number of companies looking to manufacture them.
The main challenge with a lidar configuration is the robot needs to be designed for a very specialized case. For instance, that expensive robot Richard posted is incredibly useless for any practical robot application because it’s designed to demonstrate pre-installed navigation features.. doesn’t align with the creative aspect of DIY robots.
My initiatives are always to make solutions modular. I’ve done that with the synthiam hardware reference designs. You can make it yourself, or wait to our partner team figures out who should make it for sale.
In in the meantime, don’t let Richards crudeness affect your creative efforts. An industry that requires you to feel outcasted because you’re not not a programmer would not be sustainable industry to exist. Fortunately, like all technologies, our efforts will prevail by removing the barriers of engineering requirements. You know, like html did for the internet or windows did for the PC...
Back to the original question. The IPS, is what I believe to be the most reliable solution for indoor navigation.
Thanks Dj. I understand Richards response. Due to the slow advancement and releases of products which will do the job without someone having to be an engineer, programmer, designer etc. to make it work is frustrating.
I see the advantages of a modular device which can be added to projects which are already a work in progress. You have been working on this for quite while. I hope to see it develope and happen again soon.
I thank you for the advice to continue to look into the IPS. Ron
To be clear - synthiam will never manufacture and sell hardware