
Publishes Kinect (Xbox 360) obstacle distance scans to ARC NMS for SLAM/Navigator, using configurable detection area to ignore irrelevant depth.
How to add the Kinect Xbox 360 Depth Mapping robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Navigation category tab.
- Press the Kinect Xbox 360 Depth Mapping icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Kinect Xbox 360 Depth Mapping robot skill.
How to use the Kinect Xbox 360 Depth Mapping robot skill
Use the microsoft xbox 360 connect to send navigation/obstacle information into the ARC NMS (navigation messaging system). This skill publishes obstacle scan distance data to ARC's NMS (navigation messaging system) to be used in SLAM or The Navigator skills.
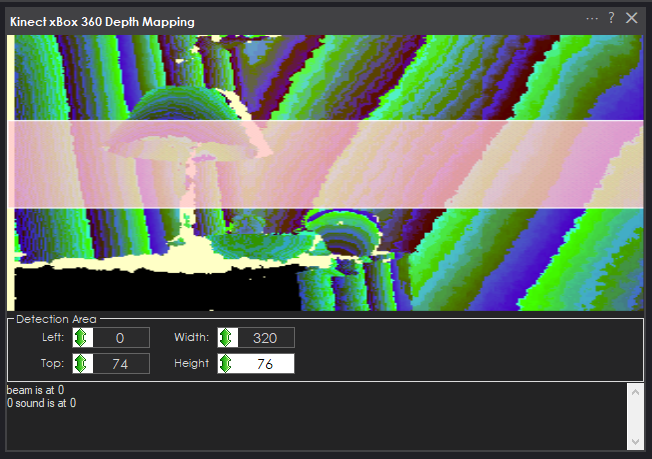
Because the entire image depth is unnecessary to be processed for mapping, only a portion is. This prevents your robot from picking up distances of things irrelevant to its size and distance. Using the options for the detection area, tune the pink box to the area of detection.
Required Drivers
The SDK 1.8 can be installed from here, as you will need the libraries it includes: https://www.microsoft.com/en-ca/download/details.aspx?id=40278*Note: under development (see To Do)
To Do - additional testing to verify distance from point cloud is calculated correctly
- compensate for distance with camera angle
- add variables (min, max depth & sound direction)
- move detect rectangle into config menu

Nice! Must get me a Kinect.
So far my test results aren’t that great. I think the intel depth camera is the way to go ... or a 360 degree lidar
Yes, the lidar seems to be the logic choice with the T265. It way less recourse hungry.
Still waiting for my T265............
That t265 is super great. Wish they were cheaper and more of them lol
I'm very interested in this skill!
I really like the idea of using Kinect sensors on robots because you can find them for pretty cheap these days. They are usually around $10-15 CAD at second-hand stores and sites.
In the future will this skill be able to move the Kinect pan/tilt motors?
Has anyone tried powering the Kinect's 12V line with a lower voltage? like 11.1V?
There’s no advantage to moving the motors, if they exist in the model. It would decrease the accuracy of detected obstacles degrees/distance by the Kinect
I don't have a kinect, but would love to see this skill in action. A video about it would be great.