
Record and replay named servo movements with adjustable speed/direction (-5 to +5), multiple recordings, ControlCommand triggers and status var
 Source Code
Source CodeHow to add the Servo Recorder robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Servo category tab.
- Press the Servo Recorder icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Servo Recorder robot skill.
How to use the Servo Recorder robot skill
This plugin allows recording and replaying servo movements at specified speeds and directions. Trigger the recording playback and speed using ControlCommand() from scripts.
Realistic Motions For realistic motion recordings, we recommend using the servo Pad Control. Find more information about the servo Pad here: https://www.ez-robot.com/Tutorials/Help.aspx?id=150
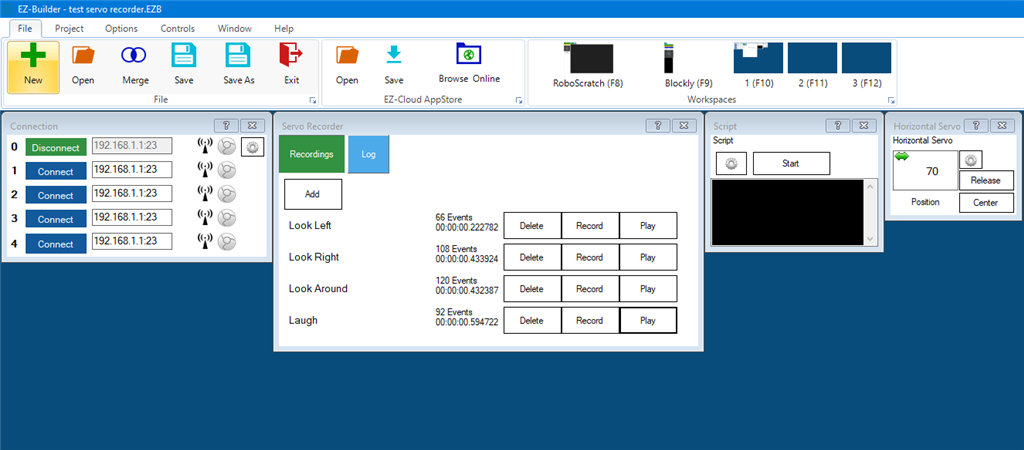
Recording You can store multiple recordings in this plugin. Each can be given a unique name that allows the recordings to be differentiated - click on the name to rename a recording. Pressing the Add button will append a new recording instance to the list. You may re-record over existing recordings as well. Press the Record button to set the instance to begin recording at the first servo movement.
Playback Individual or multiple recordings can be played back manually by pressing the Play button. Programmatically, you can play recordings using ezscript or Blockly. In Blockly, select the recording from the ControlCommand block located under Utility. With ezscript, the Cheat Sheet shows the ControlCommand() for starting and stopping the playback of each recording.
Playback Speeds & Direction The modifier allows playback of speed and direction. A value of 1 means original playback speed in the forward direction. A value of -1 means original playback speed in the reverse direction. The ControlCommand() method also accepts an optional speed parameter. You can specify a value between -5 and +5 with increments of 0.1. For example, -0.5 is half speed in reverse. Half speed forward is 0.5.
There is also a ControlCommand() to set the speed while a recording is being played back. You can programatically reverse the playback direction with the ControlCommand() speed parameter, or change the speed.
// Play Reverse at half speed
ControlCommand("Servo Recorder", "Play", "No Name", -0.5);
// Wait for 2 seconds
sleep(2000);
// Set the speed to play forward at half speed
ControlCommand("Servo Recorder", "Speed", "No Name", 0.5);
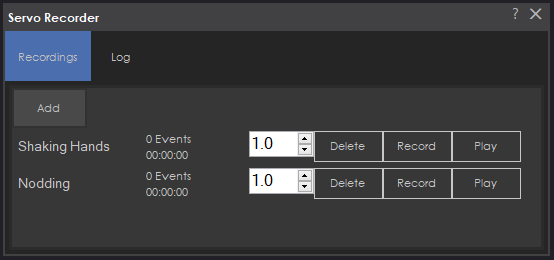
UI The UI includes an Add button that adds a new recording index. Each recording index has several UI elements...
- Title of recording (click the title to change its name)
- Number of events in record
- Length of recording
- Numeric speed selector (negative numbers mean reverse)
- Delete button to remove the recording
- Record button to begin recording (overwrites existing values)
- Play button to begin playing back the recording
Variable There is a variable that returns the playback status of recordings. If a recording is being played back, the variable $IsServoRecorderRunning will be true. You can wait for a playback to complete by using WaitFor(). See the example code below, which will run Test 1, Test 2, and Test 3 recordings one after another. The WaitFor() waits until the recording completes, and the Sleep(100) is merely to ensure the recording has started before checking the variable. The sleep(100) is most likely not required; my tests without it worked, but I put it in for safe practice. Test in your application to see if it's required as well; it may not be.
print("Playing test 1")
ControlCommand("Servo Recorder", Play, "test 1")
# Wait a short while to ensure record is running
sleep(100)
# Wait for the recorder to stop running
waitfor($IsServoRecorderRunning = false)
print("Playing test 2")
ControlCommand("Servo Recorder", Play, "test 2")
# Wait a short while to ensure record is running
sleep(100)
# Wait for the recorder to stop running
waitfor($IsServoRecorderRunning = false)
print("Playing test 3")
ControlCommand("Servo Recorder", Play, "test 3")
# Wait a short while to ensure record is running
sleep(100)
# Wait for the recorder to stop running
waitfor($IsServoRecorderRunning = false)
Control Commands for the Servo Recorder robot skill
There are Control Commands available for this robot skill which allows the skill to be controlled programmatically from scripts or other robot skills. These commands enable you to automate actions, respond to sensor inputs, and integrate the robot skill with other systems or custom interfaces. If you're new to the concept of Control Commands, we have a comprehensive manual available here that explains how to use them, provides examples to get you started and make the most of this powerful feature.
Control Command ManualPlay
Play the animation: Recording Title
- Parameter 3: Name of animation as String (optional: False)
- Parameter 4: Speed of playback as Number (optional: False)
- Returns: Boolean [true or false]
Example:
controlCommand("Servo Recorder", "Play", "Recording Title", 1)
SetSpeed
Set speed of the animation: Recording Title
- Parameter 3: Name of animation as String (optional: False)
- Parameter 4: Speed of playback as Number (optional: False)
- Returns: Boolean [true or false]
Example:
controlCommand("Servo Recorder", "SetSpeed", "Recording Title", 1)
Stop
Stop the animation: Recording Title
- Parameter 3: Name of animation as String (optional: False)
- Returns: Boolean [true or false]
Example:
controlCommand("Servo Recorder", "Stop", "Recording Title")
Record
Start recording servos to the animation: Recording Title
- Parameter 3: Name of animation as String (optional: False)
- Returns: Boolean [true or false]
Example:
controlCommand("Servo Recorder", "Record", "Recording Title")


Is there a way to "play" several servo recorders in a script, where each recorded action finishes before playing the next one. I want to play three servo recorder recordings, one after the previous one finishes. I cant use sleep as the sleep would need to be exact length of servo recorder and they need to appear as one long seamless animation. I tried just adding all three to a master script and they all play at the same time. I need something like a play and wait to finish, before moving to the next servo recorder. I'm prolly missing something obvious.
I don't know how to do that but it sure would be great to have something like 'SayEZBWait' or in this case 'ControlCommandWait'
Exactly what I was thinking Bob!
My first thought is: Three scripts each with one of your recordings controlCommands each Then with a forth script call each of the scripts using the ControlCommand with the wait. 3 extra scripts but the result will work.
I am sure I am (as usual) overthinking this, but if each of your servo recordings ends with one of the servos going to a unique position (or even moves a servo that otherwise is not used. Could even be a hidden servo not connected to anything) you could then use the Servo_Wait ( digitalPort, higher/lower/equals, value) or [b]WaitForServoMove (servoPort, [timeout MS]) command to initiate the next ControlCommand.
@rz90208 Thats what i thought of last night. I had a good read through DJs commandcontrol in the manual. Some good stuff in there.
After reading that i tried creating 3 separate scripts, each with a servo recording in them like this this one ::
Then I was able to create a new script and use the command with wait. Like this:
But When i run i run the loop i get the following error:
The update of this control has a variable which returns the status. Read the description to see how to use it for your use case.
*Note: I moved this question to a comment under the specific control - since it's related directly to this control for organization. We like to keep things organized
Thank you very much. Hopefully I'll get the hang of posting in the right area! Its hard to teach an old dog new tricks!