
jp15sil24
In The Better Navigator No Movement From The T265
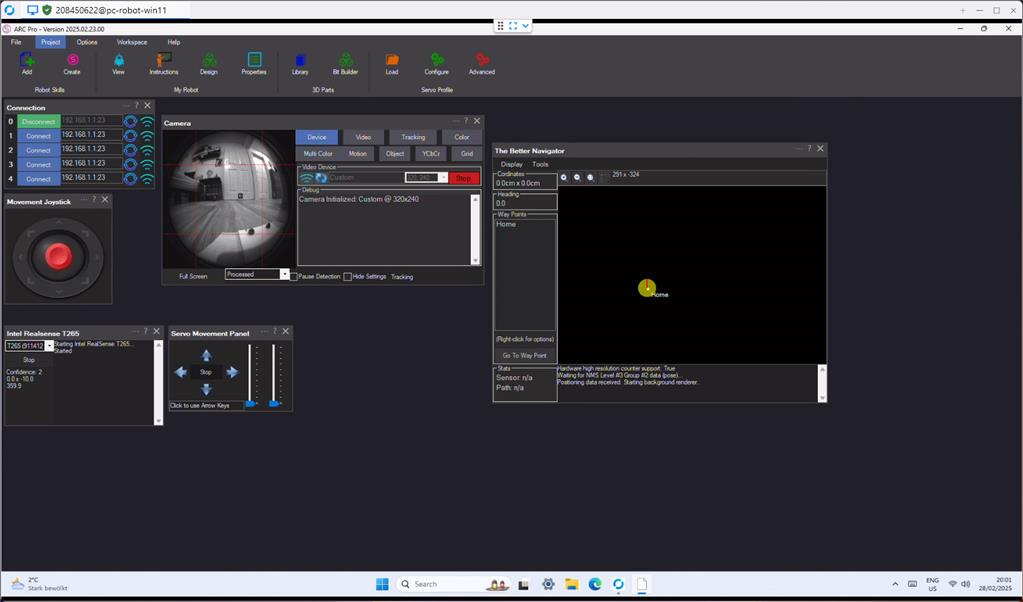
, I am experimenting with the Better Navigator, the Intel RealSense T265, and my 3-wheel robot. I am encountering an issue where the movement of my 3-wheel robot is not visible on the Better Navigator screen. When using the RPLIDAR C1 alone, everything works fine-I can see the movement and paths on the screen, and I can set waypoints. However, I wanted to try using the T265 alone without the RPLIDAR, so I removed the RPLIDAR skill from the project. I restarted ARC and started from scratch, adding four skills: a Movement Panel, Joystick, Intel RealSense T265, and a Camera Device.
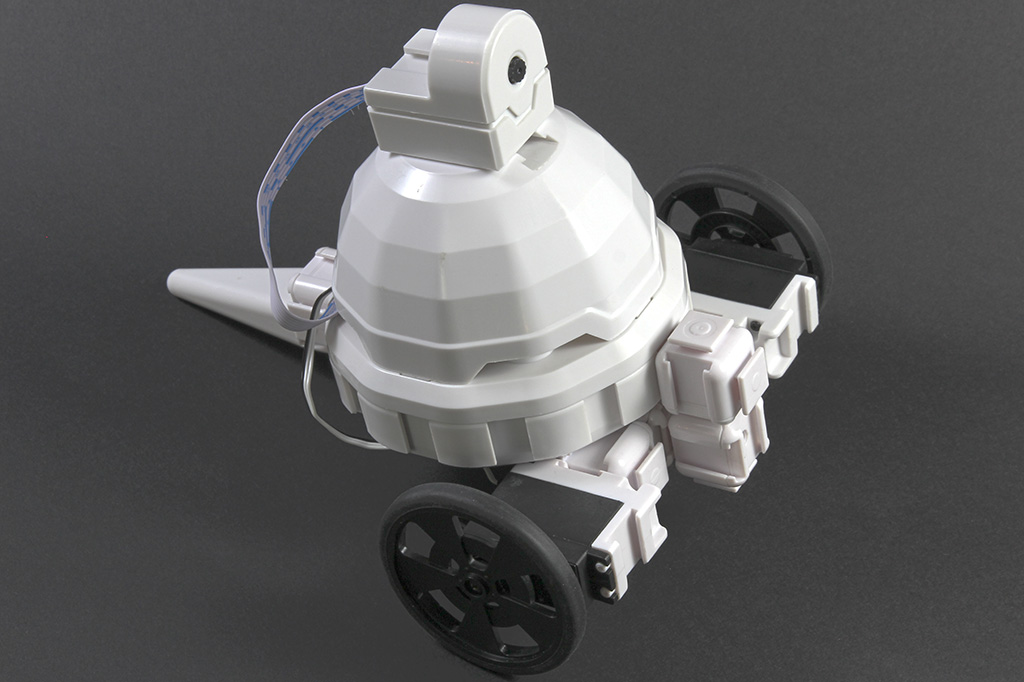
I start the Navigator and the RealSense T265, then zoom out to see the yellow dot, which represents the home position. When I move my 3-wheel robot with the joystick, it moves normally, but the movement is not reflected in the Better Navigator-the yellow dot does not move on the screen. I can see the view from the T265 in the Camera Device (see pictures below). I have watched several videos related to the T265 and navigation, and I may have overlooked something, but I am not sure what. Could it be that my T265 is malfunctioning and unable to send data? It can send video, but not data?
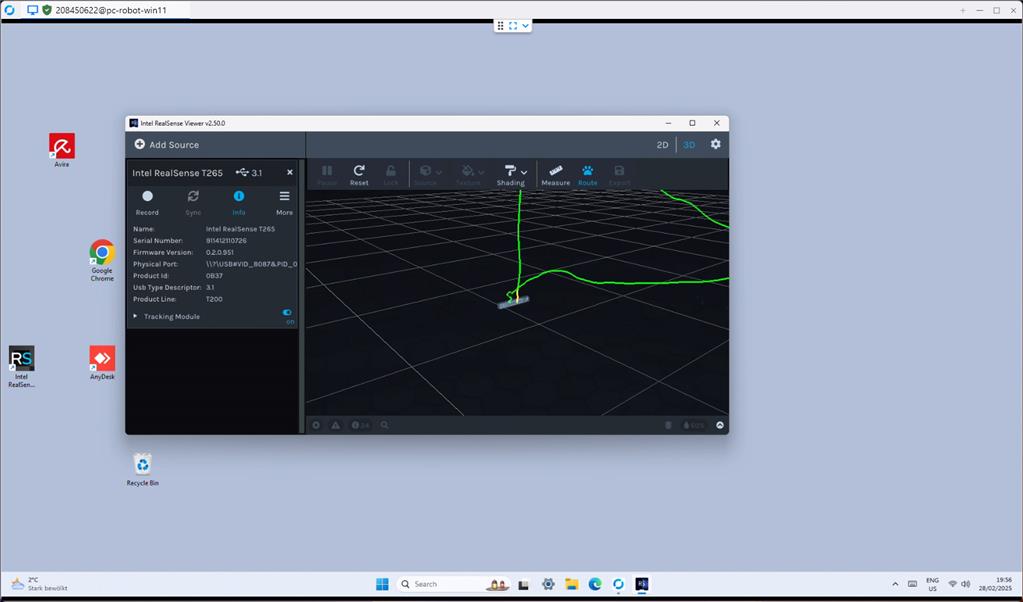
I tested the Intel RealSense Viewer tool, and it works fine. When I move the camera, I can see the 3D directions on the screen, so I believe the camera is functioning correctly. I have attached some pictures. The setting for Pose Hint Source is set to external. With the RPLIDAR, everything was fine. Additionally, my battery connected to the SBC was below 12V, around 10.5V. I am not sure if this is an issue since the T265 requires 5V from the USB.
I will try again tomorrow when the battery is fully charged. In the meantime, do you have any ideas about what might be wrong?
Related Hardware (view all EZB hardware)
Related Robot Skills (view all robot skills)



You will benefit from reading the manual for the better navigator and the NMS because they provide the requirements for navigation. But you don't have any scanning hardware. Simply providing a pose isn't enough information for SLAM mapping. There's no way for the better navigator SLAM to know where you are because there's data. SLAM uses distance data from scanning to generate a map. You're missing the crucial component that SLAM requires. There's no way for the SLAM to show you where you are without a map.
@Athena will explain more
It sounds like you're on the right track with your setup, but there are a few key points to consider when using the Intel RealSense T265 with The Better Navigator in ARC.
Key Considerations:
Pose Hint Source:
Environmental Scanning:
SLAM Requirements:
Battery Voltage:
Recommendations:
Reintroduce Environmental Scanning:
Verify T265 Data:
Check Configuration:
Review Documentation:
If you have any further questions or need additional assistance, feel free to ask!
ok i understand now. I have watched the video from DJ intel realsense t265 and ARC part 1 & 2. I had only the intel t265 in mind, didn't take care about the ultrasonic, which is fatal ! I have read the NMS infos 2,3 times but somehow did not really get it. " The Better Navigator will require a sensor from each group L3G1 and L3G2 (layer 3 group 1& layer 3 group 2)" Btw, I struggled many hours to get the intel realsense T265 worked on my pc with windows 11. In the skill intel t265, the link https://github.com/IntelRealSense/librealsense/releases/latest provides software (Intel RealSense SDK 2.0 beta (v2.56.3)) which, for me, did not work. I never could connect the T265. either the sdk or viewer. After hours of troubleshooting and with the help of chatgpt, i got this link which work perfectly. https://github.com/IntelRealSense/librealsense/releases/tag/v2.50.0 and the sdk : Intel.RealSense.SDK-WIN10-2.50.0.3785.exe Maybe it depends on the model,year, dont know.
You might be able to use The Navigator instead. I think that works without a complete sensor solution