

T265 VSLAM for ARC: SLAM-based mapping and precise way-point navigation, low-power tracking, and NMS telemetry.
 Hardware Info
Hardware InfoHow to add the Intel Realsense T265 robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Navigation category tab.
- Press the Intel Realsense T265 icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Intel Realsense T265 robot skill.
How to use the Intel Realsense T265 robot skill
With its small form factor and low power consumption, the Intel RealSense Tracking Camera T265 has been designed to give you the tracking performance for your robot. This ARC user-friendly robot skill provides an easy way to use the T265 for way-point navigation.
The T265 combined with this robot skill provides your robot a SLAM, or Simultaneous Localization and Mapping solution. It allows your robot to construct a map of an unknown environment while simultaneously keeping track of its own location within that environment. Before the days of GPS, sailors would navigate by the stars, using their movements and positions to successfully find their way across oceans. VSLAM uses a combination of cameras and Inertial Measurement Units (IMU) to navigate in a similar way, using visual features in the environment to track its way around unknown spaces with accuracy. All of these complicated features are taken care of for you in this ARC robot skill.
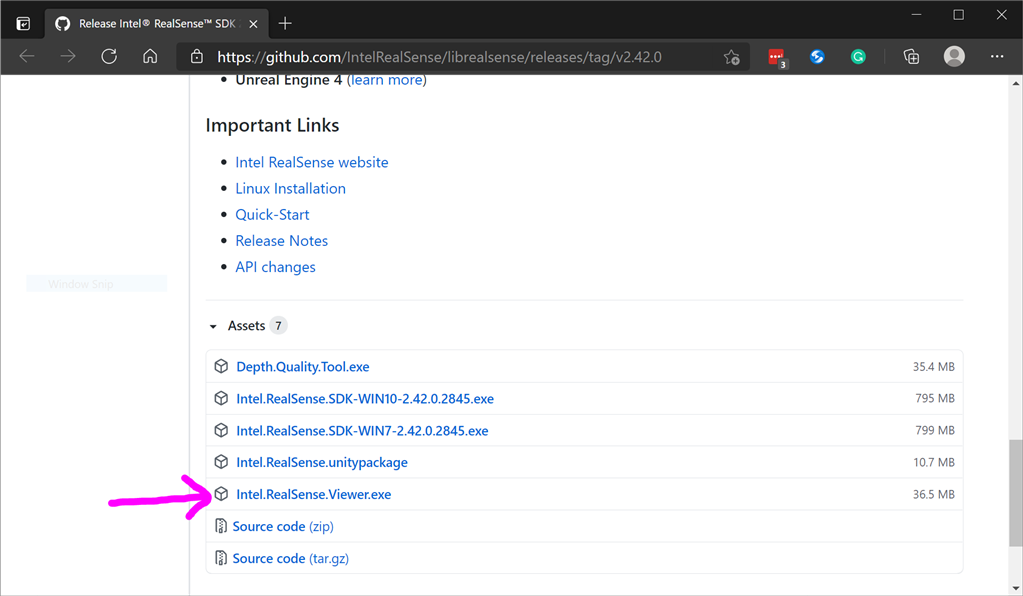
Update Firmware The device sensor may require a firmware update.
Visit the Realsense GitHub page, scroll to the bottom of the page, and install the Intel.Realsense.Viewer.exe from here: https://github.com/IntelRealSense/librealsense/releases/latest
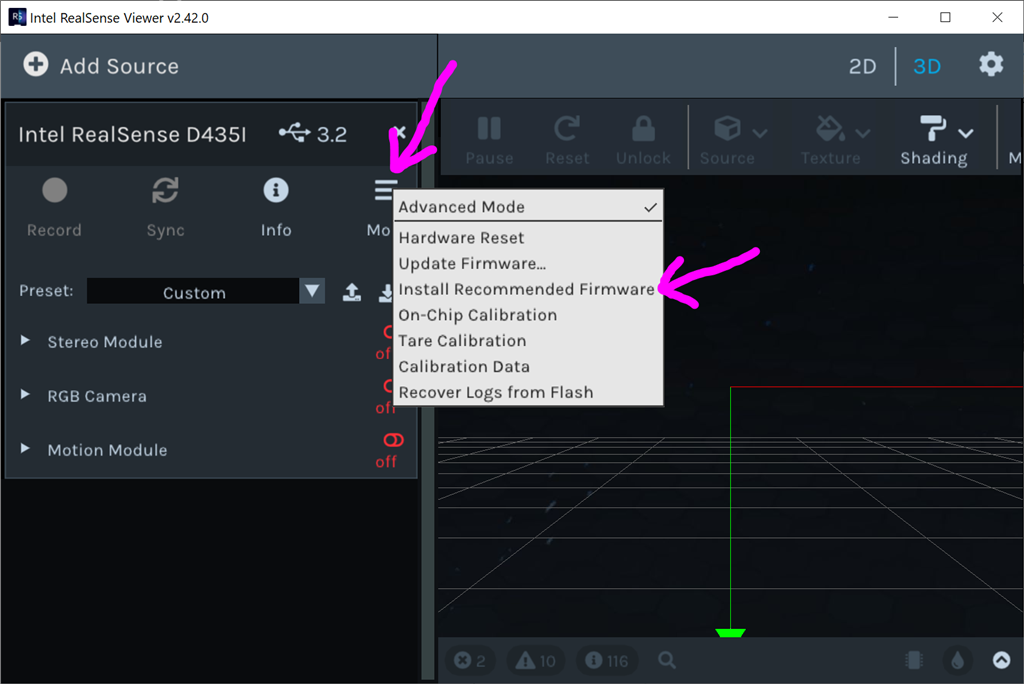
Click the hamburger settings icon and select Install Recommended Firmware
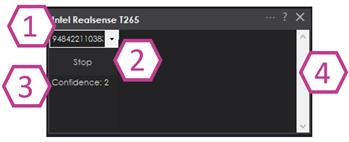
Robot Skill Window The skill has a very minimal interface because it pushes data in the NMS and is generally used by other robot skills (such as The Navigator).
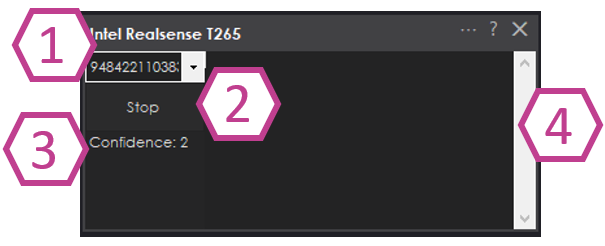
Drop-down to select Realsense device by the serial number. This is useful if there are multiple devices on one PC.
START/STOP the Intel T265 connection.
The confidence of the tracking status between 0 (low) and 3 (highest). In a brightly lit room with many points of interest (not just white walls), the tracking status will be high. Tracking will be low if the room does not have enough light and/or detail for the sensor to track.
Log text display for errors and statuses.
Config Menu
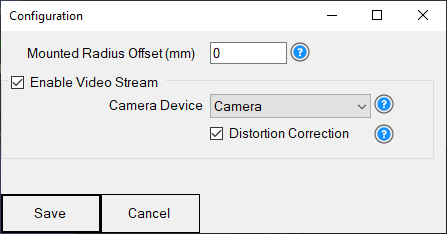
1) Mounted Radius Offset (mm) is the distance in mm of the T265 from the center of the robot. A negative number is toward the front of the robot, and a positive number is toward the rear. The sensor must be facing 0 degrees toward the front of the robot. The sensor must not be offset to the left or right of the robot.
Enable Video Stream will send the fisheye b&w video from the T265 to the selected camera device. The selected camera device robot skill must have Custom specified as the input device. Also, the camera device will need to be started to view the video.
Distortion Correction will use a real-time algorithm to correct the fisheye lens, which isn't always needed and is very CPU intensive.
Video Demonstration Here's a video of the Intel RealSense T265 feeding The Navigator skill for way-point navigation
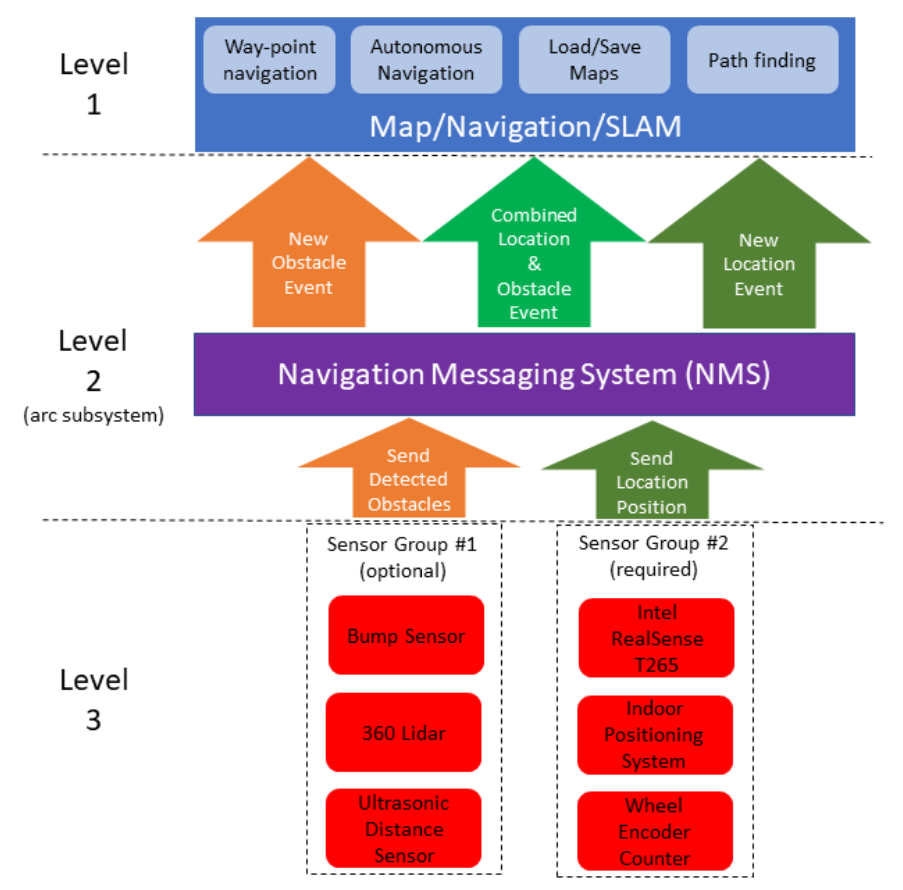
ARC Navigation Messaging System This skill is part of the ARC navigation messaging system. It is encouraged to read more about the messaging system to understand available skills HERE. This skill is in level #3 group #2 in the diagram below. This skill contributes telemetry positioning to the cartesian positioning channel of the NMS. Combining this skill with Level #3 Group #1 skills for obstacle avoidance. And for Level #1, The Navigator works well.
Environments This T265 will work both indoors and outdoors. However, bright direct light (sunlight) and darkness will affect performance. Much like how our eyes see, the camera will is also susceptible to glare and lack of resolution in the dark. Because the camera visual data is combined with the IMU, the camera must have reliable visible light. Without the camera being able to detect the environment, the algorithm will be biased to use the IMU and will experience drift, which greatly affects the performance of the sensor's accuracy.
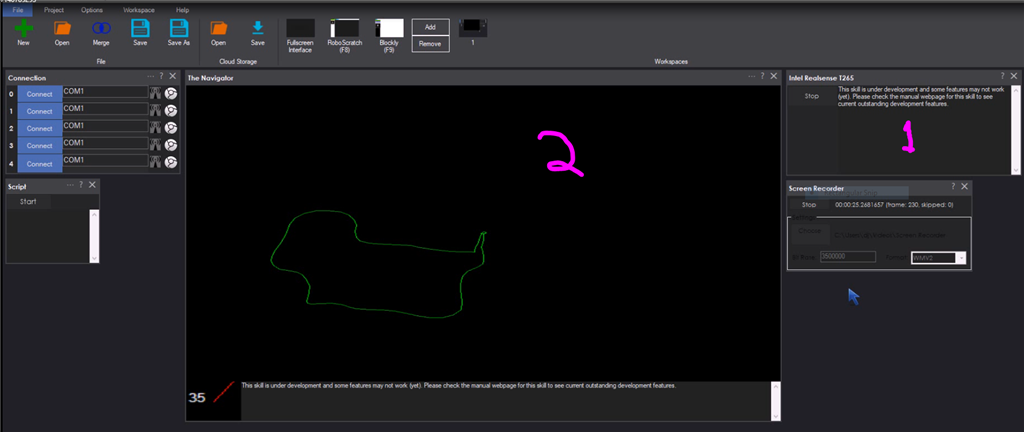
Screenshot Here is a screenshot of this skill combined with The Navigator in ARC while navigating through a room between two way points.
Starting Location The T265 does not include a GPS/Compass or any ability to recognize where it is when initialized. This means your robot will have to initialize from a known location and direction to reuse saved maps. Make sure you mark the spot on the ground with masking tape where the robot starts from.
How To Use This
Connect your Intel RealSense T265 camera to the computers USB port
Load ARC (version must be >= 2020.12.05.00)
Add this skill to your project
Now we'll need a Navigation skill. Add The Navigator to your project
Press START on the Intel RealSense skill and data will begin mapping your robot's position
How Does It Work? Well, magic! Actually, the camera is quite interesting and it breaks the world down into a point cloud of features. It remembers the visual features so it can re-align itself on the internal map. It uses a VPU, is what Intel calls it. Here's a video of what the camera sees.
Related Hack Events
A Little Of This, A Little Of That

DJ's K8 Intel Realsense & Navigation
Related Questions
T265 Realsence Viewer.Exe On An Upboard

Navigator With Mecanum (Omni) Wheel Robot Platforms
Questions Regarding Navigation
In The Better Navigator No Movement From The T265

Upgrade to ARC Pro
ARC Pro is your passport to a world of endless possibilities in robot programming, waiting for you to explore.
Version 10: Minor bug fix
Very cool. I know what I want for Christmas now. Any thoughts about supporting the D435 Camera as well?
I have been very interested in the D435 camera and would probably have bought it had I known the T265 was coming. I chose a different camera at the time (an Orbbec) because I evaluated depth cams in isolation on their own merits. There were no tracking cams. The D435 is bulky, but the main D435 component inside the housing looks to be a lot smaller, so I am very interested in getting one and taking it apart. The huge factor for me is that the SDK looks to have strong support for integrating the streams from the D435 and the T265 together, and odometry from motor encoders too. For 3D vision purposes, integrating the depth and color streams with the T265 streams is VERY beneficial. To me, this makes this sensor combo perhaps one of the best sensor combos yet. I REALLY hope they produce a single product in the future that does both.
I bought an Orbbec depth cam instead and have used multiple Orbbecs (2) at the same time on one bot. I spoke with a rep who says they have hooked up many at the same time to one pc and that you can context switch between them in a few millis. The Orbbec has some positives like (small size, no interference with each other, they say it works outside too) I think the Orbbec (and some others) is a better depth cam if only considered by itself. (just opinion here) However, because of the potential for the D435 and T265 to be tightly integrated and time synced by their SDK...I think this makes the D435 (or any subsequent Intel depth cams) to be a VERY enticing option.
Version 11: updated sample rate that is reported to the NMS
My T265 should be here in a couple days! Ordered direct.
I sent a link to Santa and begged for a Christmas Present so fingers crossed it will be under the tree on the 25th.
Haha - geez, I should be a realsense reseller . Anyway, check this...
. Anyway, check this...
Here's some video out of the fish eye as well - so you can see how the camera breaks the image down. Quite interesting...