

Bluetooth control for UBTech Alpha1 servos via ARC: map Vx to servo IDs, enable servos, and integrate with ARC movement & LEDs.
How to add the Ubtech Alpha 1 Bluetooth robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Movement Panels category tab.
- Press the Ubtech Alpha 1 Bluetooth icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Ubtech Alpha 1 Bluetooth robot skill.
How to use the Ubtech Alpha 1 Bluetooth robot skill
Control UBTech Alpha robot via bluetooth and control servos. The Virtual Servos in ARC will control the UBTech Alpha robot servos. Use the configuration button on this skill to configure what servos are to be used. The Vx servos in ARC correspond to the servo IDs of the UBTech Alpha robot.
For example:
Main Window
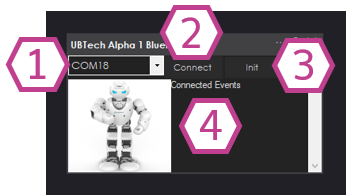
1. COM Port Drop-down Select the Bluetooth COM port that corresponds with the Alpha1 robot connected to your PC.
2. Connect Button Once the proper COM ports is selected, press the Connect button to connect ARC to the Alpha1 3. Init Button Initiates communication with the Alpha1 robot.
4. Status Display Displays text corresponding to what actions are happening with the skill.
Configuration
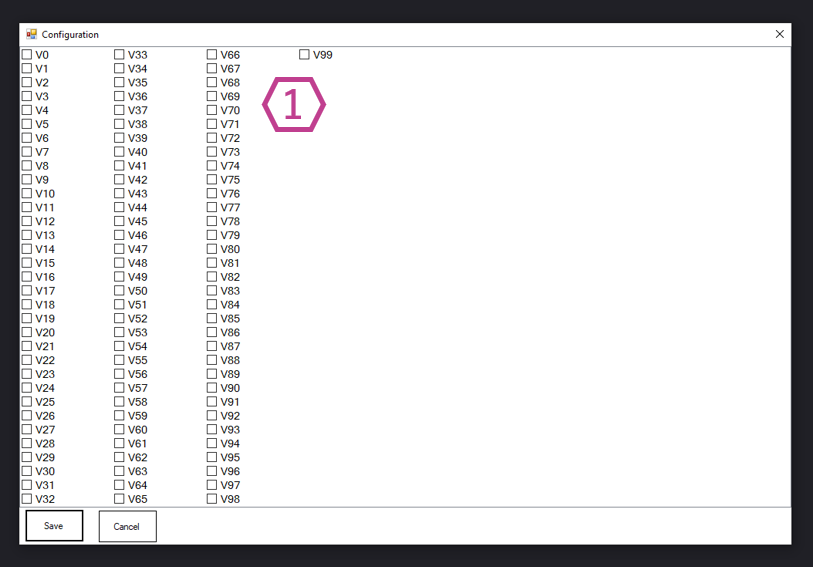
1. Virtual servo Checkboxes Check (enable) each virtual servo that corresponds to the servo ID's you have on your Alpha1. If you would like to control the servo, it will have to be enabled.
How to Use UBtech Alpha1 Bluetooth Skill
Connect your PC to the Alpha1 robot via Bluetooth.
Add the UBtech Alpha1 Bluetooth skill to your ARC project (Project -> Add Skill -> Movement panels -> UBtech Alpha1 Bluetooth).
Select the Bluetooth COM port for the Alpha1 robot and select CONNECT.
Use the configuration menu of this skill to select the servos you wish to control. Place a check in the box beside each servo to control.
Now that you have the skill configured, you may use any skills in ARC that support servos to move the Alpha1 robot. This includes Auto Position, Camera, Joystick, and more.
*Note: When editing scripts in other skills, use the Cheat Sheet or right-click in the editor to see available ControlCommand of this skill. You may connect, disconnect, and control LEDs.

that’s great to hear. Here’s a real quick browse of ARC overview for ya: https://synthiam.com/Support/ARC-Overview/arc-introduction
the concept is the graphical skills replace large bits of code. Each skill is some sort of function that communicates with one another. In your case the alpha skill is acting as a servo driver.
Roboscratch uses the configuration of alpha. I think you might be beyond RoboScratch though. It’s made mostly for elementary school children. Not to say it isn’t fun, but it isn’t super exciting.
id recommend using the Auto Position skill. It lets you design the movements and such. Now, we have heard reports that the alpha had trouble with having the servo positions sent in rapid concession. Be warned of that limitation apparently. Here’s a link to the Auto Position manual: https://synthiam.com/Support/Skills/Movement-Panels/Auto-Positioner-Gait?id=16057
Thanks again for your help, its very much appreciated. I've done a quick test using Auto Position and think I have it straight in my mind as to how it works. I dont appear to be able to control servo speed at the moment, I am tired though so will have another look tomorrow.
I do not believe the speed is supported with those servos. But the speed value in Auto Position is kind of redundant. Because the Auto Position takes care of making sure the servos arrive at the destination frame at the same time. It does that regardless of the speed support
Been having another play today and to be honest, I'm at the point of giving up. There are just too many unknowns for me to continue. I just cant seem to get any sort of logical response from him.
Am I not understanding the software? Am i using the software incorrectly? Does the software function correctly with this robot? Does my robot function correctly?
I was really hoping for this to be a cheap introduction to robotics and I now think I was wrong. I also dont really want to spend any more money on this as I feel I have already spent enough on what is now effectively scrap.
As I cant answer any of the above questions, I simply cant think how I can continue with him.
I feel it is the robot. We have received a number of poor customer experiences with that robot - and many have returned them or sold them. The trouble is the manufacturer is very quiet and does not reply to customers or help with their product.
My advise is to sell the robot and get yourself something more reliable and cheaper. I do recommend the EZ-Robot JD Humanoid if you want to maintain the humanoid form-factor, because it works very well - and has people learning with it all around the world starting from elementary school. EZ-Robot also has a lot of tutorials for their robots. Here's the tutorials for the JD: https://synthiam.com/Community/Tutorials/125?courseId=1
Oh, and here's where you can get a JD: https://www.ez-robot.com/Shop/
@DJ. I've been working on Alpha 1S until last february using EZB V4. I couldn't obtain reliable servo control. I do know that protocol information is missing, but I'm seeing here a "skill" suggested for that robot and a "version 19" (for the plug-in ?) making me hope that some progress has been made since then . Have you or someone else tested with success these new tools ?
You'd have to try and see - with the very minor amount of information available - and the lack of cooperation of the manufacturer, what you get is what you get with the skill until more information is provided
I reached out to Ubtech but got no response, which I believe is common for them. I have managed to obtain their servo callibration tool though. If this is any use to anyone, I would be more than happy to send it to you.