

Creates a map in a global variable; proof-of-concept SLAM visualizer (very experimental).
How to add the EZ-SLAM robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Navigation category tab.
- Press the EZ-SLAM icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the EZ-SLAM robot skill.
How to use the EZ-SLAM robot skill
Main Window
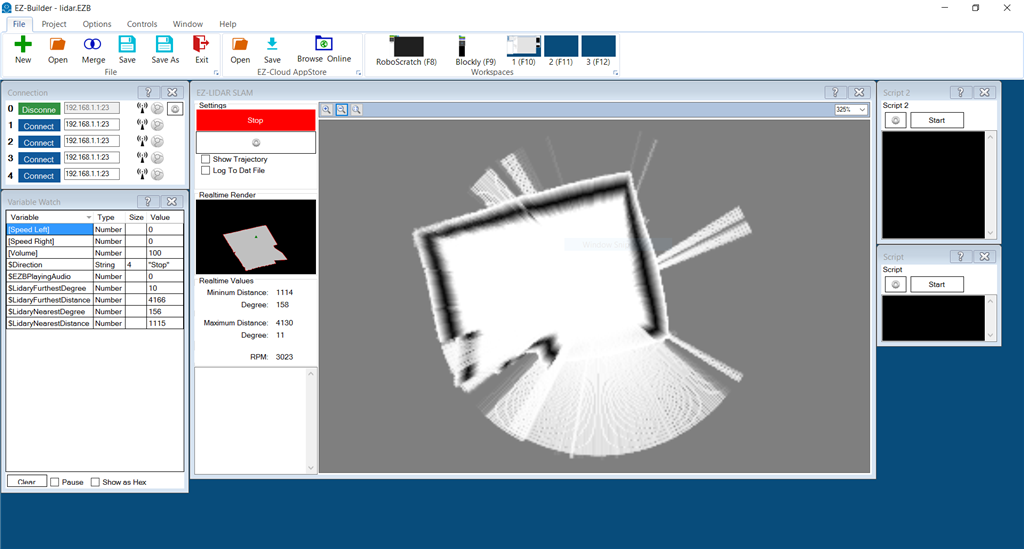
This robot skill does not have navigation capabilities. We recommend using The Better Navigator instead of this. This was created for testing and proof of concept if you want to make your own skill for slam.
This skill is for the ARC NMS (Navigation messaging system) to display Simultaneous Localization and Mapping (SLAM). A LIDAR is recommended to be used in conjunction with this skill to create an accurate SLAM map of the robot's environment. Verify the Lidar you choose can push scan data into the NMS for this to work.
NMS (Navigation Messaging System) If you're not familiar with the NMS, please read this support document that explains how this robot skill interacts with others: https://synthiam.com/Support/ARC-Overview/robot-navigation-messaging-system
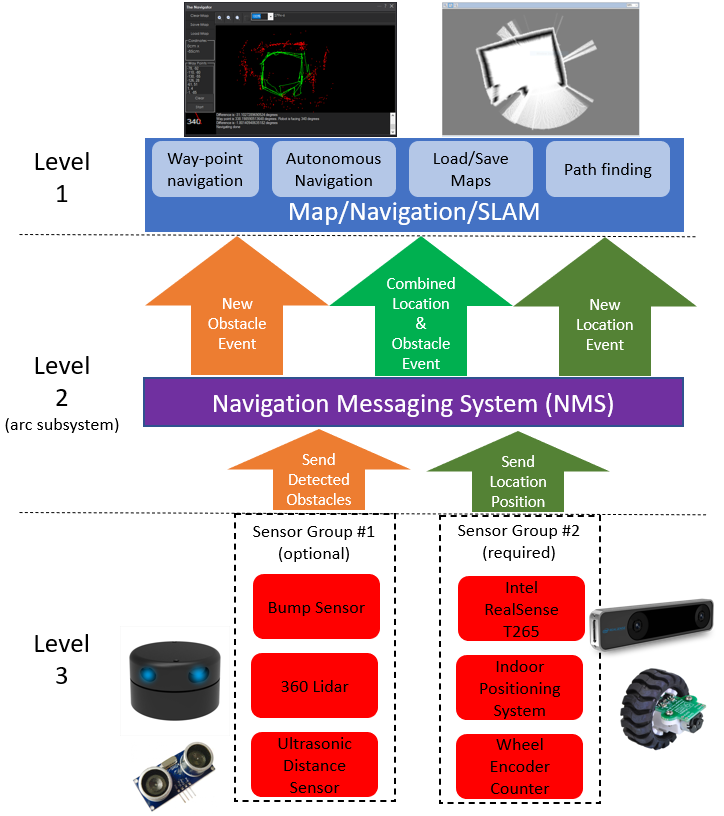
This skill operates at level #1 in the NMS stack. For Level #3 sensor data, it is best used in conjunction with a 360-degree lidar. This skill does require telemetry positioning data from Level #3 Group #2. This skill does not provide navigation ability, which is why we recommended The Navigator for waypoint navigation. View the NMS page for compatible robot skills that provide telemetry/pose data (NMS Level #3 Group #2) and obstacle detection data (NMS Level #3 Group #1).
Related Questions

What Is Really Needed For Indoor Navigation?

Using Pwm's On Connection 3

Upgrade to ARC Pro
ARC Pro will give you immediate updates and new features needed to unleash your robot's potential!
This looks amazing Ez-Lidar Slam, A must have item! So it is not available yet?
Not yet - there was a discussion a few months ago on it because we were having some challenges getting affordable pricing from the lidar manufacturer. We've since been able to obtain some head-way but not guaranteed yet. I think we'll end up supporting another lidar. The tough part is there's no standard for the data, so we can't make it universal. We'll have to select a hardware lidar that is available and affordable to people
Well that is good that you guys are still on top of this,I did download the plugin to have a look and it looks like something exciting to work with, also Like the fact that you may look at more affordable Lidar products.
@DJ,
Which Lidar unit is the plugin compatible with? Will you please release the wiring diagram?
Thank you.
Zero that you have access to. There’s a control board that we designed which uses imu for navigation that connects to the Lidar. Until we sort out the supplier relationship for the physical Lidar unit, we’ll have to wait
Looking forward to the release of the EZ-Lidar!
Looking at buying the TF mini Lidar as it uses a focused IR LED instead of a Laser to keep it cheap. As my 2 Ultrasonic collision detectors were great indoors but not so much outdoors. Would the EZ Lidar plugin work with something like this or will I need to just add a small laptop to the robot and some how get the signals working on EZ controller a different way? I believe I can likely just hook them up to the EZ controller digital pins since it is same thing as any regular LED's.Also I did see there is an XV-11 cheap Lidar that also has a plugin in EZB,so will take a look at that too.....and final note, for I.R. Led collision detection possibly the Sharp I.R. plugin for EZ software is the cheapest effective way so I would say a toss up on TF mini or Sharp depending where you can find the best price online.Sunlight outside can be a problem with I.R. detection so it needs to be covered from direct view of sunlight as I remember my old V2 robot I.R. detection going crazy in the sun. So for great accuracy up to 40 meters I am looking at this Lidar only because it says free shipping and that makes a good discount on price but not sure about availability....https://www.robotshop.com/ca/en/lidar-lite-3-laser-rangefinder.html
Version 20: Updated to work with the NMS as a level 1 map viewer