

Control UBTECH Alpha UBT-12HC smart servos via ARC using EZ-B v4/IoTiny UART, assign virtual ports, set baud, custom bits and position mapping.
How to add the UBTECH Alpha Servos UBT-12HC robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Servo category tab.
- Press the UBTECH Alpha Servos UBT-12HC icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the UBTECH Alpha Servos UBT-12HC robot skill.
How to use the UBTECH Alpha Servos UBT-12HC robot skill
Control the UBTECH Alpha Robot Digital smart Servos (UBT-12HC) with ARC. The servos must be powered appropriately, and connected to the EZ-B v4 or IoTiny with the respective port. Visit the Config menu of this plugin to view the port configuration.
The Virtual Ports (V0..V99) in ARC can be assigned to the UbTech servos.
UART Ports
This plugin requires the RX signal wire of the servo be connected to TX of the selected UART or digital port (if Software UART is selected on IoTiny)
Hardware UART is for the EZ-B v4 only. Do not use software UART on EZ-B v4. View the EZ-B v4 datasheet to identify the UART ports (0, 1, or 2). EZ-B v4 datasheet can be found here: https://www.ez-robot.com/Tutorials/Lesson/18
Software UART should only be used with IoTiny
Default baudrate of UBTECH servos is 115,200
Bind To Virtual Servos
- The configuration menu also provides an option to select the Virtual Ports, which correspond with the ID's of the UBTech servos. If the UBTECH servo ID #0 is connected, select V0. #1 = V1, #2 = V2, etc..
Additional Info
- Discussion on these servos is here: https://synthiam.com/Question/3932

Custom Bit Settings There are 3 bits that seem to not be understood for the protocol. Since UBTech does not release the protocol for their products, the community is working to better understand what the parameters are. The configuration menu of this plugin allows you to set hardcoded values for those bits. The bits are for 5, 6 & 7.
Custom servo Position Mapping The UB Tech servos have their own position range, and we don't know what it is. So, the configuration menu allows you to specify the min and max positions for the range. This will be mapped to the ARC servo position range. Meaning, if you set the range in this plugin, it will be mapped to the range for all ARC servo controls.
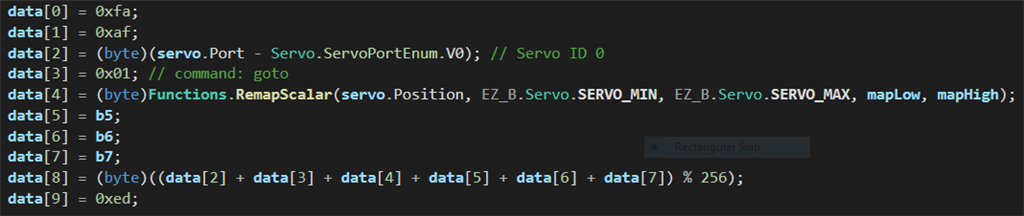
Protocol Packet Code Here's a copy and paste from the plugin code. This is how the packet is being assembled to be sent to each servo. The values specified by you in the configuration menu are b5, b6, b7, mapLow and mapHigh.

Your tests are not using a common ground. All uart/serial of all devices on all the planet are compatible with their respective logic voltage. In this case, 3.3v
Dj,the common ground was there. The serial signal from the ezb serial port swings between 3,3 V (high level) and about 0,3 V (low level) with nothing connected. This is a perfect signal. But when you connect many (16) servo control lines to the serial port (of course with a common ground !) the load is excessive and the port can't sink enough current to force a low level on the bus. The low level can't go below 1,5 V. These servos are different from other servos I have used. The input impedance is much lower. The original hardware was designed for them. I'm now testing using a cmos buffer CD 4050 on the serial port .
Hmmm - that's a terrible design on ubtech's part.
Try something for me... connect your PC to the alpha controller via Bluetooth and tell me if there is a COM port detected. I need to know the communication to the alpha, and if it's a COM port, i found a bluetooth protocol that's not detailed, but we can probably make it work. Then if you wanted to add a camera, you'd need to add an Iotiny on the back as well.
That not ideal, but UBTech servo design appears poorly implemented. From viewing pictures of their controller, it appears to have an STM32, which is what the EZ-B and IoTiny use. Do they have a buffer on their pcb?
Frames and actions and music (mp3) are programmed on the PC by a program similar to ezb, and then transferred to the robot, via USB cable, into a memory card. Bluetooth only activates the selected actions. For this I use an android tablet. Can you anyway invent something in such context ?
Connect your PC to the alpha controller via Bluetooth and tell me if there is a COM port detected
For some reason the bluetooth in the PC isn't working . It does not detect the robot. I'll try to understand what happens and let you know. About how the original hardware drives the servos, remember that there are 4 separate connectors , that we supposed to be tied together in the pcb. Perhaps the controller uses 4 different ports , each controlling only 4 servos (not 16), so reducing the current of each port. Or there might be some other chip for that. There are many unknown small chips on the rear side of the pcb....
Here are photos of the PC screen after connecting alpha to PC. There is a COM4 port. The device is called a " bluetooth headset ".
It's enough for you to make a great plug in ?
I'll need you to do some testing. Please try this plugin and tell me if any of the servos move when you're connected to the bluetooth of the alpha. https://synthiam.com/Products/Controls/Third-Party-Robots/UBTech-Alpha-Bluetooth-Control-19020
Please continue this conversation in that plugin thread.