
Balancing controller for Sainsmart v3 (and compatible) robots: PID tuning, real‑time telemetry, angle offset, movement and calibration via ARC.
How to add the Inverted Pendulum robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Movement Panels category tab.
- Press the Inverted Pendulum icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Inverted Pendulum robot skill.
How to use the Inverted Pendulum robot skill
The inverted pendulum skill is designed to be used with the Sainsmart v3 balance robot but technically you can use the Sainsmart hardware, combined with ARC, to balance any robot. You'll just need some patience to tune the PID values. In order to use this skill you'll have to install the custom EZB firmware onto the Sainsmart robot's Arduino Mega and connect it to ARC.
Main window
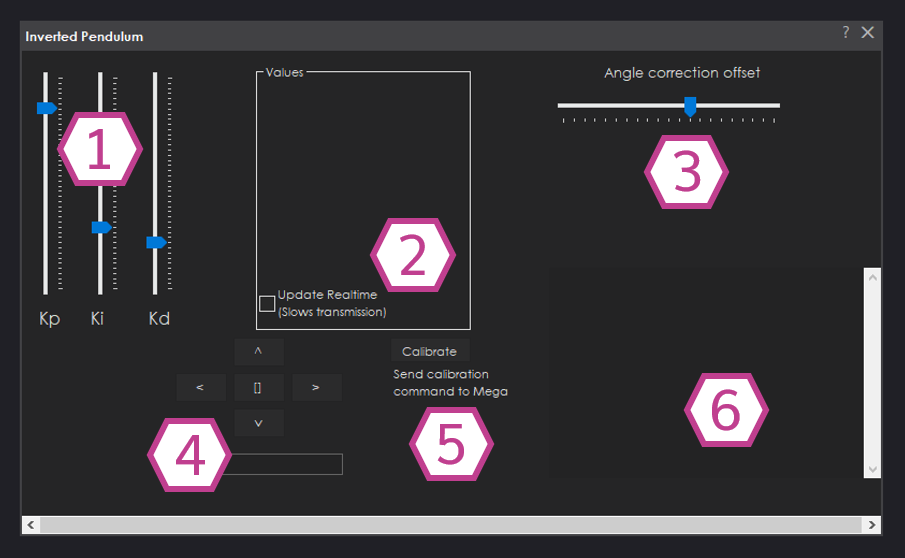
1. PID Gain Value Sliders These sliders adjust the proportional, integral, and derivative (Kp, Ki, and Kd) values that are used for the closed loop balancing algorithm.
2. Values Display & Update Realtime Checkbox The Kp, Ki, and Kd values are displayed here as well as Omega, Angle, Distance, encoder values, angle offset, and speed values. The Checkbox is used for showing realtime values if needed.
3. Angle Correction Offset Slider Correct the angle of your balancing robot with this slider.
4. Movement panel This panel allows you to move the balancing robot, forward, reverse, left and right.
5. Calibrate Button This button sends the Calibration command to the Arduino Mega.
6. Status Display This displays communication between ARC and the Arduino Mega.
How to Use Inverted Pendulum
Download the EZB firmware onto the Sainsmart Balancing robot's Arduino Mega.
Add the Inverted Pendulum Skill to your ARC project (Project -> Add Skill -> Movement Panels -> Inverted Pendulum).
Connect the Arduino Mega's COM port to ARC with a USB cable or Bluetooth.
Push the Calibrate button then start adjusting the sliders in the Inverted Pendulum Skill until you have optimal balancing. Adjust Kp, then Kd, and then Ki. Note that Kp is a usually higher in value and Kd is a very low value.
Video
Requirements
You will have to program the EZB firmware onto the Arduino Mega, located on the hardware page, in order to use this skill.Resources
The hardware for this skill can be found here: https://synthiam.com/Docs/Hardware/SainSmart-Balance-RobotHere is the Inverted Pendulum firmware for the Arduino Mega: https://synthiam.com/uploads/imagesrc/EZ-Mega-v1_Balance_Robot-636848728401310251.zip
The tutorial for installing the EZB firmware onto an Arduino Mega is here: https://synthiam.com/Community/Tutorials/Connecting-Arduino-to-EZ-Builder-17526
*Note: This skill is in beta stages


I see they discontinued this so we need to build our own. There is a DIY kit and it is just an Arduino, 2 motors, IMU and a bridge. I guess we could add a 24L01 or use an ESP32 instead of Arduino so you have wireless connection to ARC https://circuitdigest.com/microcontroller-projects/arduino-based-self-balancing-robot
I have this one too: ELEGOO Tumbller Self-Blancing... https://www.amazon.ca/dp/B07R1XP3YX?ref=ppx_pop_mob_ap_share
but the code would have to be different. I haven’t modified it because they’re pretty boring and quite difficult to control, surprisingly
and quite difficult to control, surprisingly
I was going to buy one of those but you don’t currently support the IMU I believe. GY-521?? and the MPU6050 are really cheap. I am sure I have one laying around somewhere.
The robot skill doesn’t use the imu. The firmware needs to be modified to accept movement parameters.
Doing the imu error calculation in ARC would be too slow. It requires a much tighter loop and therefore runs on the microcontroller. In this case, the Arduino. Because once you capture the imu data, and send it to Arc, a process in Arc, sends commands back. Too much time has gone by, and the imu measurement is expired.
The time between measurement and action needs to be as low as possible. Otherwise, the calculated error from the measurement is expired.
So do the Kalman and error calculation on the Arduino. Allow the Arduino to accept commands from ARC for movement.
The movement of an inverted pendulum is actually adding an offset to the value for the error calculation. For example, in a perfect world standing straight up and down would be 0 degrees. So if your imu is reporting -3 degrees, an error of -3 degrees is needed for correction.
If you want the robot to move forward, you can set the value from 0 to -2 degrees (or something. This is just an example). Then it leans forward during the correction, so it moves forward.
The ARC movement commands modify the error value on each wheel to allow the robot to move.
Would an onboard PC running ARC be just as responsive as an Arduino as you don’t have network bottlenecks.
IMU=>SPI=>Arduino (Mega) IMU=>SPI=>ARC (Rockpix)
A PC can never be as responsible as a microcontroller. Even a microcontroller that is considered slow, such as an Arduino Genuiunonono that's 16mhz, will still process the instructions more consistently and with higher precision.
The communication (SPI, UART, or WIFI) is irrelevant to how the operating system executes instructions and the overhead and prioritization.
You see, even your computer's accessory ports have microcontrollers that do the timing accurate closed loops - and they pass information to and from the cpus i/o as requested, generally by an interrupt. So from what I'm explaining, you would use the microcontroller as an i/o extension similar to how your computer works. You don't see the microcontrollers on your computer because they're inside and come with it. Your robot "parts" are DIY extensions that do the same thing.
An operating system will never and can never perform the timing necessary for high-precision closed-loop functions - such as an inverted pendulum. Even a "real-time" operating system, such as freeRtos, is not actually real-time compared to a closed loop. The definition of real-time when referring to operating systems is not misleading.
I should add as well one of the challenges that I mentioned earlier is timing. The number of microseconds between the closed loop needs to be tracked to the highest precision possible - because that's the value you use for compensation between samples. The code for an inverted pendulum can be pretty simple if tightly closed loops have high precision. Soon as you introduce variance in timing, you have no measurement to compensate for the sample rate. Remember, physics is still happening between samples, and you need some way to compensate for that time between samples accurately.
Thanks for the education as always DJ