

Bluetooth control for UBTech Alpha1 servos via ARC: map Vx to servo IDs, enable servos, and integrate with ARC movement & LEDs.
How to add the Ubtech Alpha 1 Bluetooth robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Movement Panels category tab.
- Press the Ubtech Alpha 1 Bluetooth icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Ubtech Alpha 1 Bluetooth robot skill.
How to use the Ubtech Alpha 1 Bluetooth robot skill
Control UBTech Alpha robot via bluetooth and control servos. The Virtual Servos in ARC will control the UBTech Alpha robot servos. Use the configuration button on this skill to configure what servos are to be used. The Vx servos in ARC correspond to the servo IDs of the UBTech Alpha robot.
For example:
Main Window
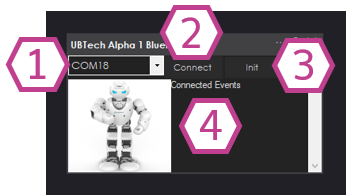
1. COM Port Drop-down Select the Bluetooth COM port that corresponds with the Alpha1 robot connected to your PC.
2. Connect Button Once the proper COM ports is selected, press the Connect button to connect ARC to the Alpha1 3. Init Button Initiates communication with the Alpha1 robot.
4. Status Display Displays text corresponding to what actions are happening with the skill.
Configuration
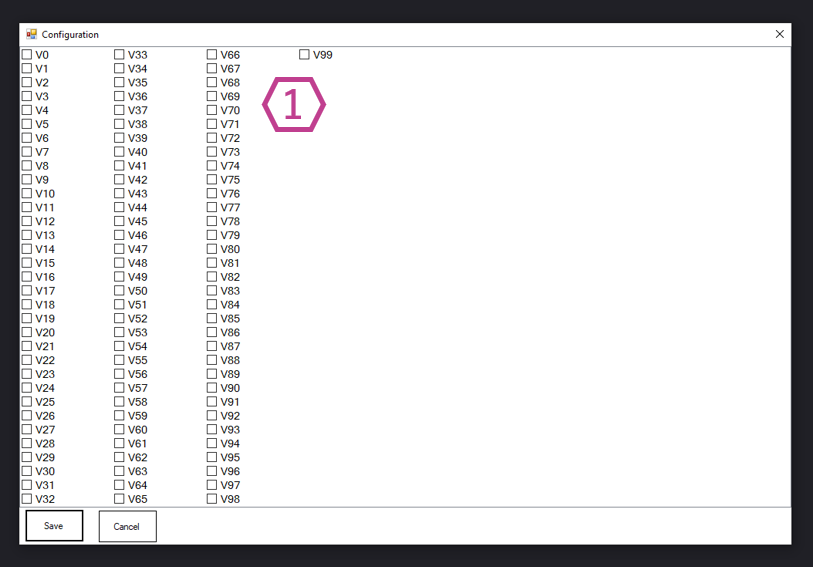
1. Virtual servo Checkboxes Check (enable) each virtual servo that corresponds to the servo ID's you have on your Alpha1. If you would like to control the servo, it will have to be enabled.
How to Use UBtech Alpha1 Bluetooth Skill
Connect your PC to the Alpha1 robot via Bluetooth.
Add the UBtech Alpha1 Bluetooth skill to your ARC project (Project -> Add Skill -> Movement panels -> UBtech Alpha1 Bluetooth).
Select the Bluetooth COM port for the Alpha1 robot and select CONNECT.
Use the configuration menu of this skill to select the servos you wish to control. Place a check in the box beside each servo to control.
Now that you have the skill configured, you may use any skills in ARC that support servos to move the Alpha1 robot. This includes Auto Position, Camera, Joystick, and more.
*Note: When editing scripts in other skills, use the Cheat Sheet or right-click in the editor to see available ControlCommand of this skill. You may connect, disconnect, and control LEDs.

Hi DJ. I'm sure you are busy on many issues, but I hope , when it'll be possible for you, you'll go back working on this one .
I'm not sure what else can be done. It seems the servos only respond when they want to respond. I'll try another update with experimental settings as usual, and see if that helps. But unless they update the documentation for the robot, i'm shooting in the dark.
I understand, there's lack of information about bluetooth protocol. lt's a non promising work.
@DJ. A new idea. We have experimented direct command of servos with bluetooth plug-ins, but they don't work correctly. As you said, and i agree, further trials to drive servos directly are shots in the dark. We might try another path, i.e. using ezb software and also ubtech software, but only to move the servos. The procedure could be:
I'd make such experiments . Do you agree ? I need some tool to send (and receive) bytes via bluetooth (by ezb or PC). Please help with this.
Referring to my previous post, can you help providing or suggesting some tool to send (and receive) bluetooth messages for my experiments ?
Was this made for Alpha 1s or Alpha 1p?
I have an Alpha 1s and whilst he does connect (flashes lights and plays little tune) I can not make him move. I have read all instructions and all posts here but no joy.
As I have only recently 'adopted' my Alpha, I was hoping to use him as a learning tool before moving up to the EZB and modifying him. I am a mechanical design engineer and was really wanting this to be my first step into robotic programming.
Hey Icy - as far as i know, the skill was created to work with the alpha 1s. Unless a recent firmware update has voided the communication protocol, it should still work.
You'll need to select the Vx servos that correspond to the servo IDs of the alpha. Then, you can add other robot skills and ensure you select those Vx servos in those skills as well. Specify the min and max of those servos or they will not move.
There's a dozen or so EZB firmwares available for variety of hardware - while the most popular is the EZ-Robot EZ-B v4, which comes pre-installed with the firmware. The list of EZB compatible hardware is here: https://synthiam.com/Support/Hardware/Hardware-Overview
If you're still having trouble and believe a firmware update on the alpha changed some things, we'd be happy to help you out. However, there's limited information available about their communication protocol. It would be a good start for you to contact the manufacturer and request a protocol definition for the bluetooth connection. We can go from there to update the skill appropriately
Thanks for the quick response, I've figured it out now and have all his servos set up and moving. Im slowly getting my head around the software but its a totally new way of thinking for me.
Now I have him moving, I would like to start programming some routines using Roboscratch. I assume I would have to add the Alpha servo skill to be able to do this, is that correct?