

Bluetooth control for UBTech Alpha1 servos via ARC: map Vx to servo IDs, enable servos, and integrate with ARC movement & LEDs.
How to add the Ubtech Alpha 1 Bluetooth robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the Movement Panels category tab.
- Press the Ubtech Alpha 1 Bluetooth icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the Ubtech Alpha 1 Bluetooth robot skill.
How to use the Ubtech Alpha 1 Bluetooth robot skill
Control UBTech Alpha robot via bluetooth and control servos. The Virtual Servos in ARC will control the UBTech Alpha robot servos. Use the configuration button on this skill to configure what servos are to be used. The Vx servos in ARC correspond to the servo IDs of the UBTech Alpha robot.
For example:
Main Window
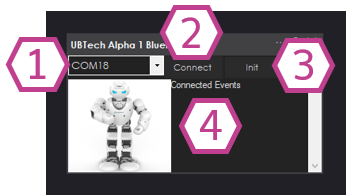
1. COM Port Drop-down Select the Bluetooth COM port that corresponds with the Alpha1 robot connected to your PC.
2. Connect Button Once the proper COM ports is selected, press the Connect button to connect ARC to the Alpha1 3. Init Button Initiates communication with the Alpha1 robot.
4. Status Display Displays text corresponding to what actions are happening with the skill.
Configuration
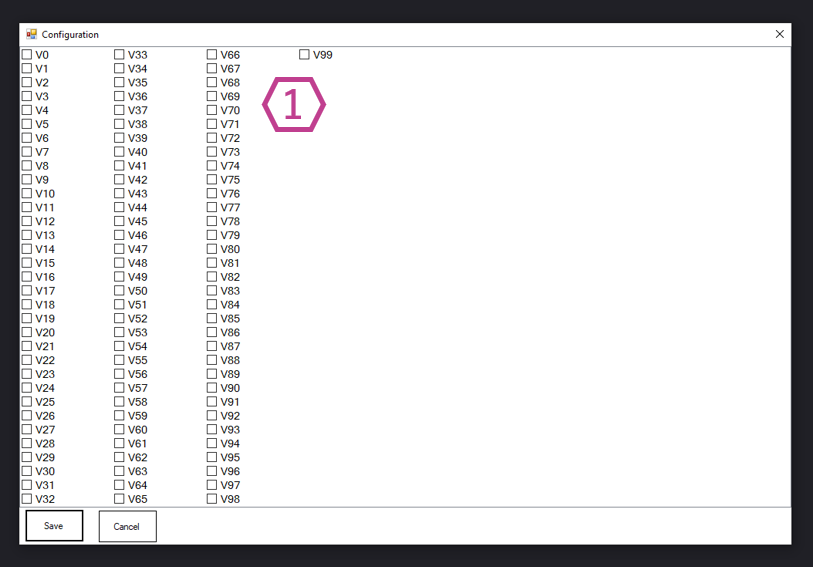
1. Virtual servo Checkboxes Check (enable) each virtual servo that corresponds to the servo ID's you have on your Alpha1. If you would like to control the servo, it will have to be enabled.
How to Use UBtech Alpha1 Bluetooth Skill
Connect your PC to the Alpha1 robot via Bluetooth.
Add the UBtech Alpha1 Bluetooth skill to your ARC project (Project -> Add Skill -> Movement panels -> UBtech Alpha1 Bluetooth).
Select the Bluetooth COM port for the Alpha1 robot and select CONNECT.
Use the configuration menu of this skill to select the servos you wish to control. Place a check in the box beside each servo to control.
Now that you have the skill configured, you may use any skills in ARC that support servos to move the Alpha1 robot. This includes Auto Position, Camera, Joystick, and more.
*Note: When editing scripts in other skills, use the Cheat Sheet or right-click in the editor to see available ControlCommand of this skill. You may connect, disconnect, and control LEDs.

"0" means center position ,"+" means CW, "-" means CCW tests starting at "0" test1: +60 test2: -45 test3: +60 test1: -45 test2: -50 test3: -45 test1: -10 few seconds after this last command it went to "0" by alone without any further commands . Command "handshake" resets to center position from any position produced by tests 1 or 2, but , when previous test was test3., sometimes (not always) it doesn't reset . Handshake command execution is confirmed by sound and head led blinking, but servo doesn't move. Repeating the above sequence starting at "0" the results are completely different.
My brain is melting down.....It's hard for me to find some logic reason for these results. You know what you expected from those tests. Perhaps you'll understand. I'm here for any other test.
the Test servo buttons should move into random positions. this appears to be correct.
Are the servos moving faster in this test than the previous when you said they’re moving really slow?
do the servos always go back to center after the servos move with Test servo buttons?
how long before the servos move back to center?
They are quite random, as you say. It was impossible to make a list.
1)they're much faster than before. It looks like a normal servo speed. Perhaps it may be even faster, as I seem to have seen in ubtech actions.
they don't go back to "0". After the test they don't move anymore. But once, only once, after test3, I saw (with surprise) the servo go back to "0" without any command, alone, after 2-3 seconds. " send handshake" command resets (almost always) to "0" from any position ( but sometimes it doesn't ).
speed for the return to center (caused by handsake) is much slower, it depends on how many degrees it has to go. maximum is about 3 seconds.
Some news about this ?
Try this latest plugin and use the trackbar to slide and see if the servo moves. You may need to press the handshake first.
installing the new plug in I had this Dos window, where i don't see the usual message I've always seen , i.e. : "installation successful".
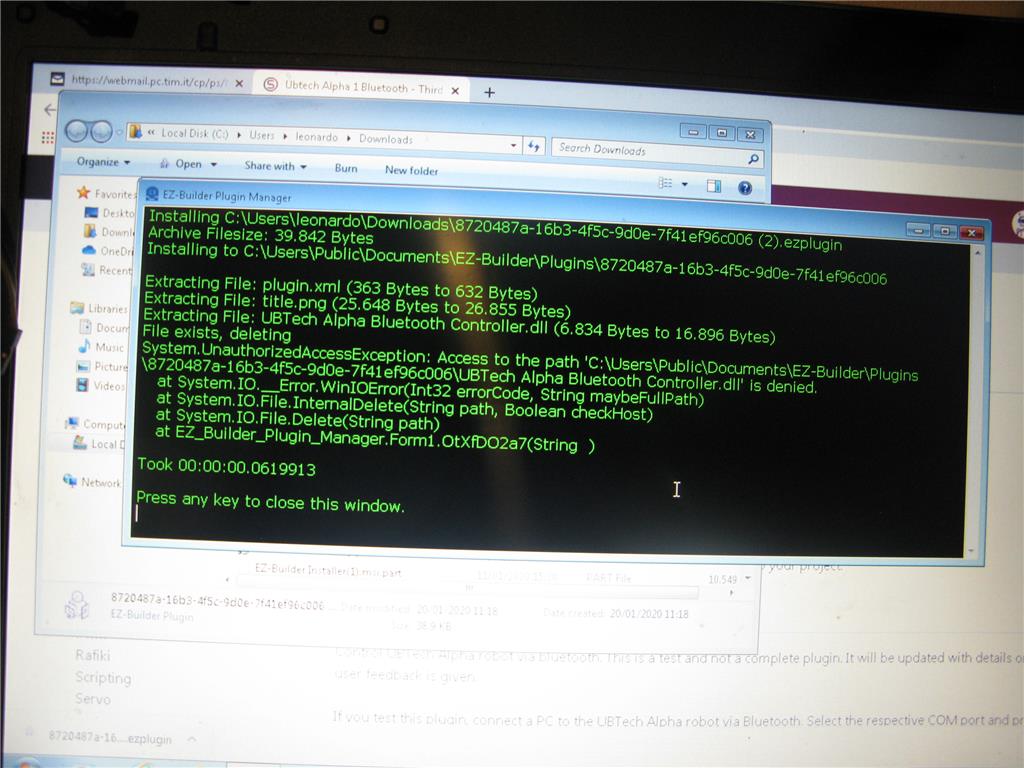
Is it installed or not this way ?It’s be use your have the control already added when trying to update.
restart ARC and update the control when it’s not added to the project.
Ok I'll try . Now I can't do it , because I'm testing the servos connected to ezb, without ubtech pcb inside. I'm sending a report in the other thread.