Flash Arduino Uno firmware to read DHT11 temp/humidity and MPU6050 IMU simultaneously; provides $AngleX, $AngleY and $AngleZ variables.
Requires ARC
v2
(Updated 8/19/2021)
Compatible with:
 Windows
Windows
How to add the MPU6050 Tilt Angle Sensor robot skill
- Load the most recent release of ARC (Get ARC).
- Press the Project tab from the top menu bar in ARC.
- Press Add Robot Skill from the button ribbon bar in ARC.
- Choose the I2c category tab.
- Press the MPU6050 Tilt Angle Sensor icon to add the robot skill to your project.
Don't have a robot yet?
Follow the Getting Started Guide to build a robot and use the MPU6050 Tilt Angle Sensor robot skill.
How to use the MPU6050 Tilt Angle Sensor robot skill
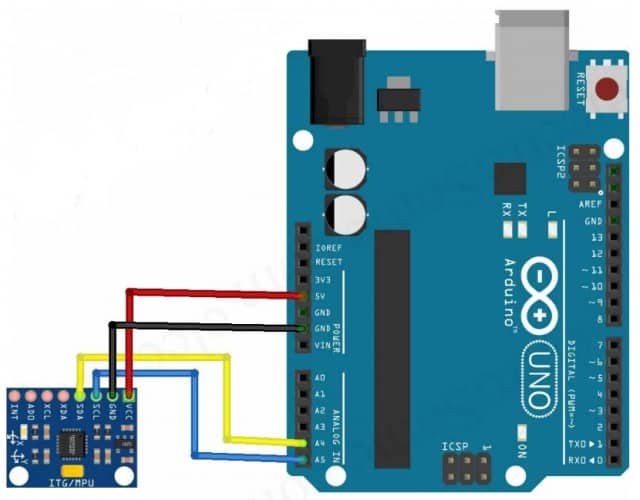
You need to flash the firmware to the Arduino. With this firmware you can use both the DHT11 and the MPU6050 sensors at the same time. EZ-Genuino_DTH11_MPU6050_Uno.zip For the DTH11 wiring help go Here. For the MPU connect like pic. The variables $AngleX, $AngleY and $AngleZ are created. Have Fun!

Can anyone confirm this skill still works for me? I can't get the MPU to provide feedback. I am not not using the DHT sensor.
if you're not using the correct sensor then it won't work.
This is what I am using a MPU 6050. I thought this was the required device. I am not using the other device this service supports temp/humidity DHT
DJ thoughts on why the skill does not work anymore?
I didn’t make this skill. You’d have to hear from the author.
Looking at the Arduino code, I can only assume the sensor isn’t connected because the robot skill should be easy enough to consume the data. I don’t have a sensor like that to test with. Do you get any errors or messages in the ARC log or robot skill window?
DJ, I am getting no errors anywhere it just does not seem to work. I have tested all this hardware together using an example script for the MPU6050 and UNO and it works perfect.
Just as a FYI I have decided to use EZB4's and an IOTiny in this project. I am going to try the other skill that is for the EZB's and see if I can make that one work. I may have more question on it when I can hook everything up and try it.