Choose Your Robot
You are about to use the most accessible guide for building robots with science-fiction-inspired features. We guarantee that anyone can build a robot on par with that of heavily funded corporate organizations. Synthiam has packaged the most cutting-edge technologies and made them available to everyone.
Need Some Inspiration?
Do you need some inspiration before we begin? With over 4 million robot connections on Synthiam's platform, we have plenty of community robot examples.
 View Example Robots
View Example RobotsWhat kind of robot do you want to program?
Synthiam's ARC platform will connect to many robot products, toys, and DIY kits. Let's start by selecting what type of robot to make. There are options for using a robot kit or quickly building your dream DIY robot.
1. Use a Robot Product
Skill Level: Beginner
Program a pre-built robot product or a kit with Synthiam ARC. You can program a robot directly out of the box with low effort. Here are a few popular ARC-compatible robot products. Select a robot product to view purchase links and manuals.
AdventureBot is a beginner-friendly, two-wheeled robot kit that connects over WiFi and includes a camera. It’s built using EZ-Bits...

The AR Parrot Drone is a small flying quadcopter that can be controlled by Synthiam ARC. ARC communicates with the drone over WiFi (wireless...
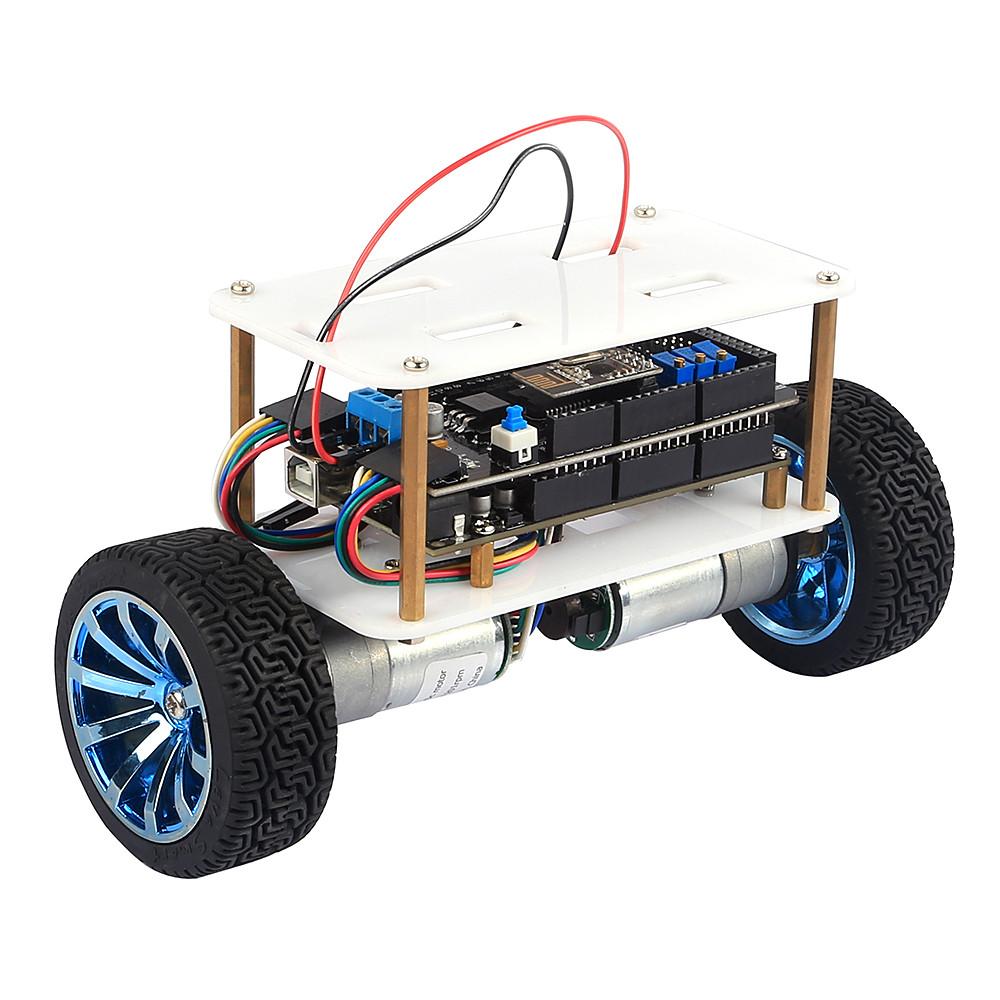
The SainSmart v3 balance robot is a type of robot called an inverted pendulum. That means it balances upright on two wheels (similar to how...

What this page is for: helping a complete beginner connect and control a Robotis Bioloid humanoid robot (AX-12 Dynamixel servos) using...

The ROBOTIS MINI (Darwin Mini) is a small humanoid robot that works with Synthiam ARC. It uses 16x ROBOTIS XL-320 Dynamixel servos for...
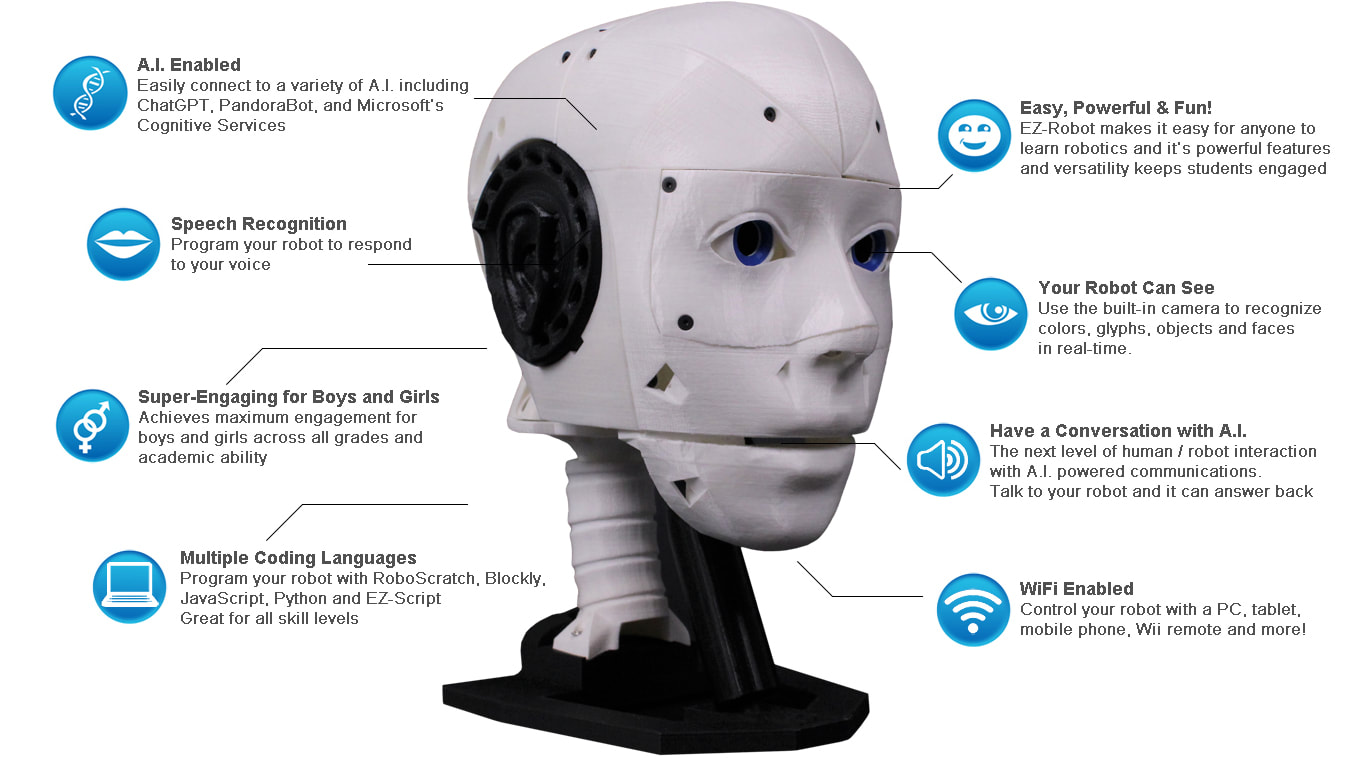
The EZ-InMoov Humanoid Head is a do-it-yourself (DIY) educational robot head designed for learning and experimenting with robotics, AI, and...

JD is a ready-to-build humanoid robot kit from Synthiam / EZ-Robot, originally invented in Canada. It’s designed for people who are brand...

The Roli Rover is a WiFi-enabled, planetary rover-style robot kit from Synthiam (EZ-Robot). Think of it like a small "space rover"...

The iRobot Roomba is a popular and affordable robot base (also called a mobile platform) that you can upgrade with Synthiam ARC and an EZB...

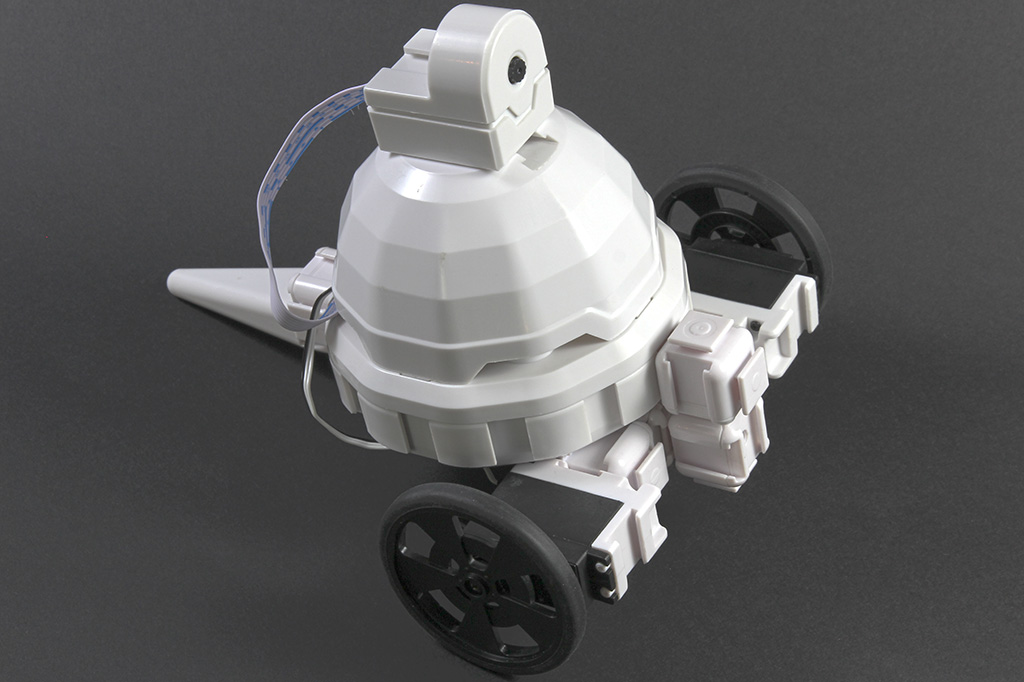
The Shell-E Innovation Kit is a hands-on robotics project where you 3D print a robot body, install electronics, and then use Synthiam ARC...

The Synthiam ARC Six Hexapod (often just called "Six") is a beginner-friendly robot kit and controller platform originally...

Sphero is a popular remote-control robotic ball that connects over Bluetooth. When you use Sphero with Synthiam ARC, you can control the...

Telepresence means you can "be there" in another location by driving a robot remotely and seeing/hearing what it sees and hears....

The DJI Tello is a small, affordable drone that’s fun to fly and also a great way to learn robotics, automation, and coding. In Synthiam...
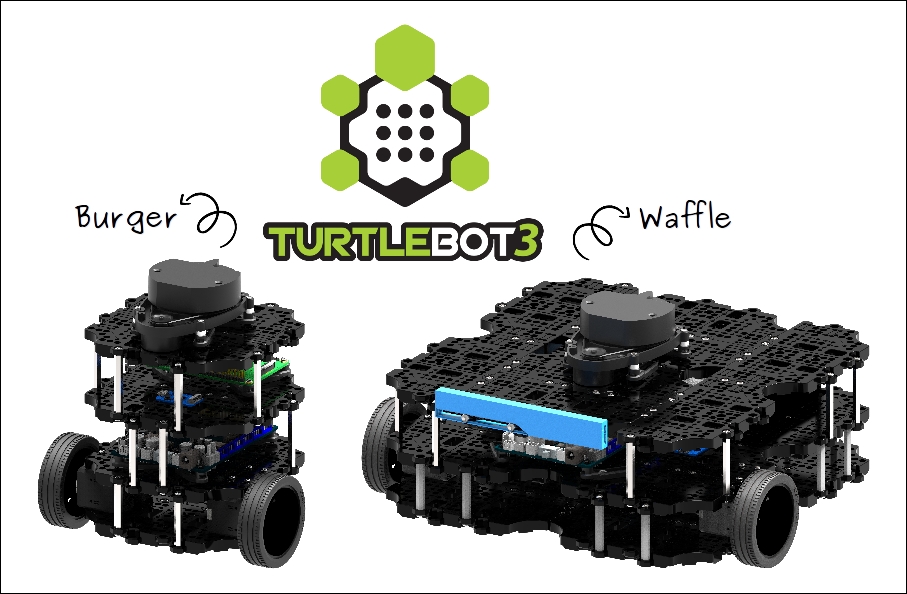
TurtleBot is inspired by the original "turtle robot" used with the Logo programming language (created in 1967). The idea was...
2. Make a DIY Robot
Skill Level: Intermediate, Advanced
Making a DIY robot has traditionally been a daunting task. Anyone can make DIY robots with Synthiam's ARC robot software.
We have created a step-by-step Getting Started Guide to making a DIY robot - press the button and get started!
Make a DIY Robot