
2. Computer
Let's select the computer you will use with the robot. ARC runs on a Windows PC and connects to an I/O Controller (EZB) for moving servo motors and reading sensors. This step will determine what type of computer your robot will use.
A robot computer can be a PC laptop or Single Board Computer (SBC) that runs Microsoft Windows and the ARC software. If the computer is an SBC, it will be small enough to install inside the robot. Otherwise, the computer will be remote outside the robot, such as a laptop or desktop. No matter what type of computer you choose, it must be connected to an EZB Microcontroller for moving servos, motors, LEDs, and sensors. The computer's location will determine the connection type to the Input/Output (I/O) controller (USB or Wi-Fi). Any I/O controller compatible with ARC is called an EZB (more information below). Decide which of these two EZB/Computer configurations works with your robot build.
Embedded PC
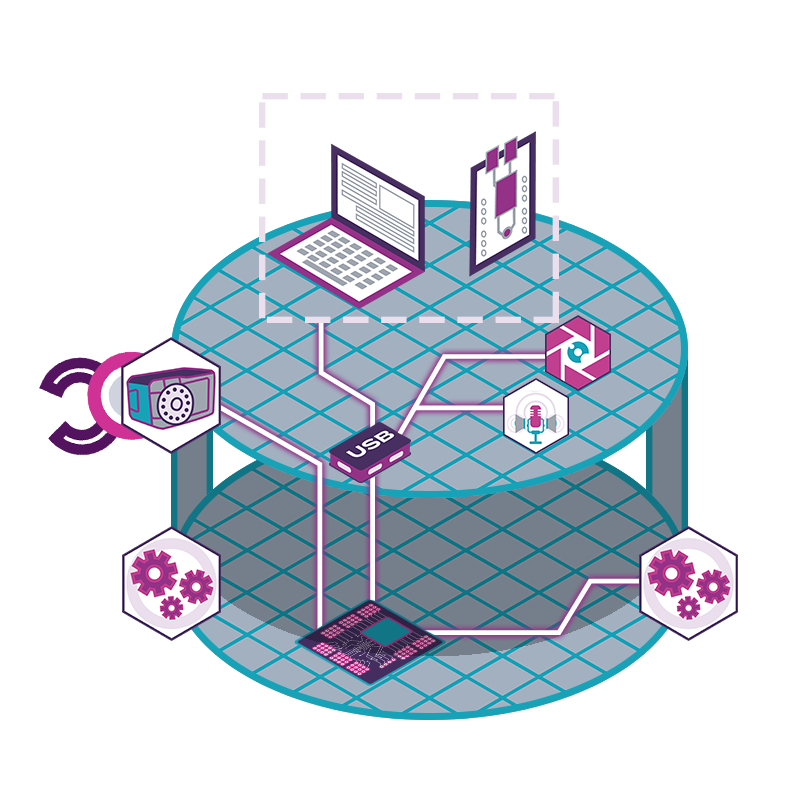
An embedded PC means mounting the computer on board the robot. The computer can be a laptop, single-board computer (SBC), or tablet. The connection to I/O EZB microcontrollers is through USB. The benefit of this configuration is that USB devices, such as joysticks, cameras, and sensor peripherals, can be connected directly to the PC on the robot.
Remote PC
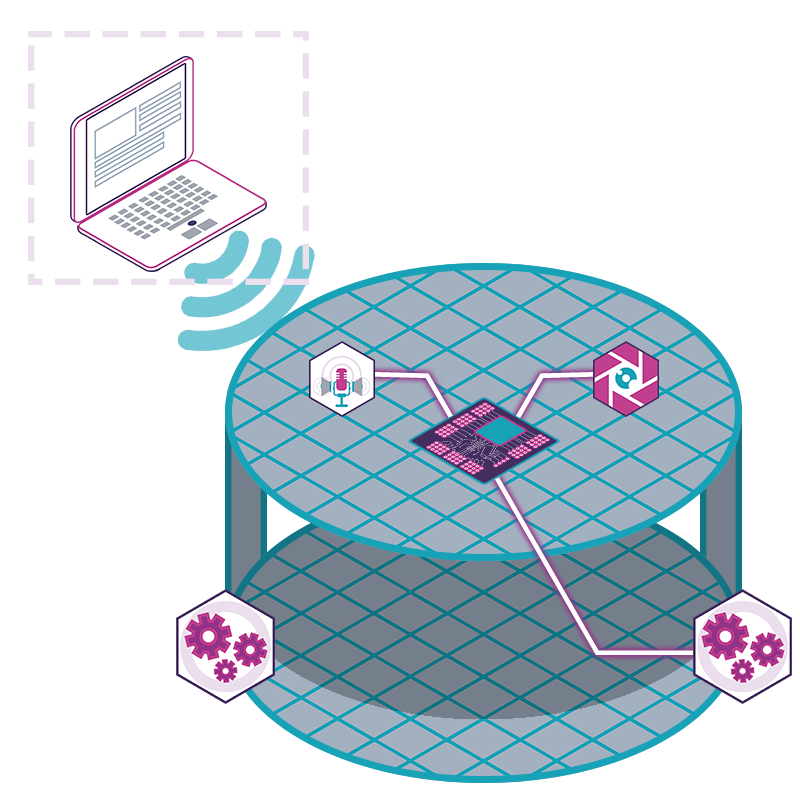
Remote PC, the computer is not mounted on the robot and most likely sits on your desk or workbench and connects to the robot via wifi or Bluetooth. The computer can be a laptop, tablet, or personal computer (PC). The downside to this configuration is that USB devices (Cameras, sensors, etc.) can not be mounted on the robot because they need to be connected to the PC, which will not be mounted on the robot.
Natively Supported Embedded PCs (SBC)
Did you choose to run ARC on an SBC? ARC runs any computer that supports Windows 10. However, when dealing with SBCs, there are performance considerations. CPUs in portable-style computers have less performance than a laptop. We have documented and verified these SBCs that work well with ARC. If you choose an SBC, follow our tips for making a robot to get the most out of the robot's dedicated computer.
Get ARC Windows 10 ISO
The Atomic Pi is a small computer (an SBC, or Single Board Computer) that can be mounted inside a robot. Unlike a typical microcontroller...
The LattePanda is a small single-board computer (SBC), similar to the Raspberry Pi and a kabillion times more powerful. The LattePanda can...

What is this page? A Raspberry Pi is a small, affordable computer that can be used as the "brain" of your robot when running...
If you’re looking for a small computer to run a robot, the Radxa ROCK Pi X is one of the best values we’ve seen for embedded computing. It’s...
The Synthiam ARC Up Board (EZB) is a credit-card sized single-board computer (SBC) that runs Microsoft Windows on an Intel Cherry Trail...