

















Project:
By request, my 6 year old son wanted me to design and build him a Hexapod. So I started to whip up some designs in Zbrush and together we decided what he would look like. "Main thing he has to have dad, is an arm cannon!" So we got that. Then I thought it would be cool to have a robot kinda part of or riding the hexapod. So kinda a centaur bug/robot thingy.
First thing I had do was figure out was how big would be too big? There are alot of reasons why not to go too big, which I ignored. So from an engineering stand point, "will it walk?" is the big question. At first I thought it would be about 5 pounds, then it went to10 pounds and now it might be around 12 pounds...so again time will tell. Maybe it walks once or 2 feet then crumbles!
I sourced out the materials and batteries. Knowing this was going to be a 23 servo design, I wanted a good battery and and chose a 7600 mah lipo. Maybe it will run for 15 min underload... again untested, time will tell.
Finally I chose PETG for the print material, due to its strength. Two weeks of printing on 3 printers 24/7. There ended up being 53 individual parts.
The Motions include 18 axis for the legs, waist forward/back tilt, waist rotate, cannon arm up and down, head up and down and rotate. 23 axis in total. The body is comprised of EZ Robots micro servos and the legs and tilt are the HDD servos also from EZ.
There will be an EZB inside and camera in his chest. A Bluetooth amplified speaker system onboard will allow us to play TONS of robot sounds from BlueZone.
I will updated this project as I finish goals, but if he doesn't walk due to weight or burning out servos due to stress, I will most likely abandon this build, as the next logical step would be to move up to dynamixels, but that would require $5000 worth of servos. A bit much for a toy!
So lets get started!
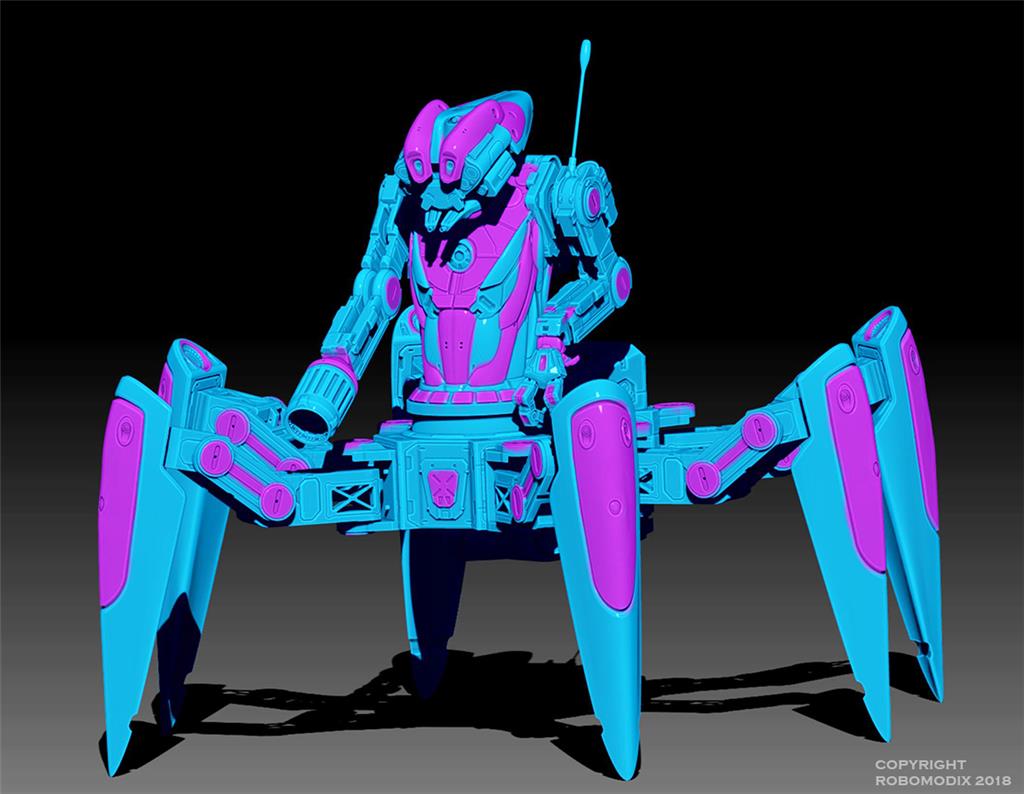
Here is a final design in zbrush and keyshot


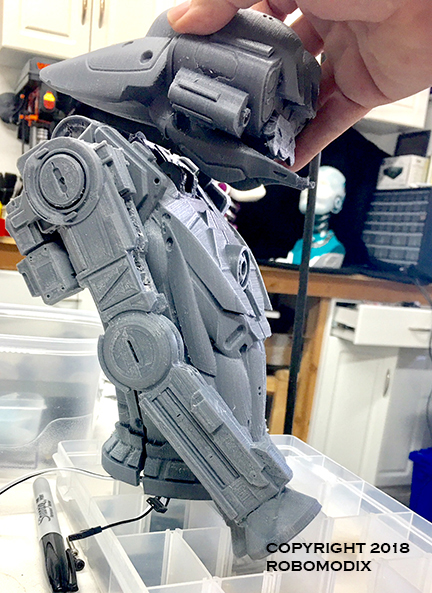
Then came the modeled parts each one 3d Printed.

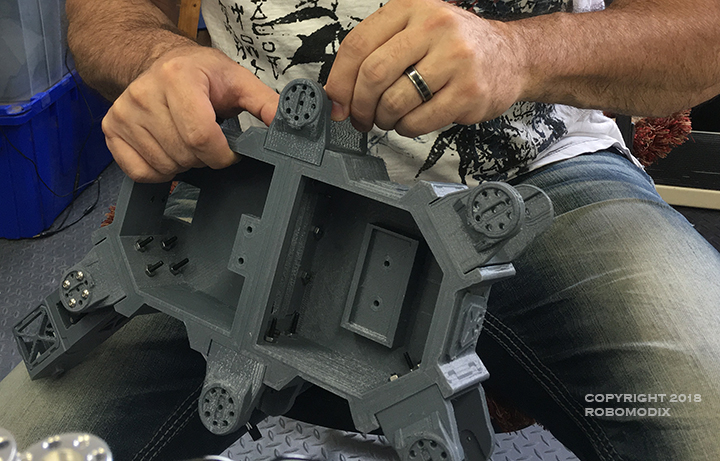
Here I've started adding the axis to the body

Here I continue on with assembling the main chassis
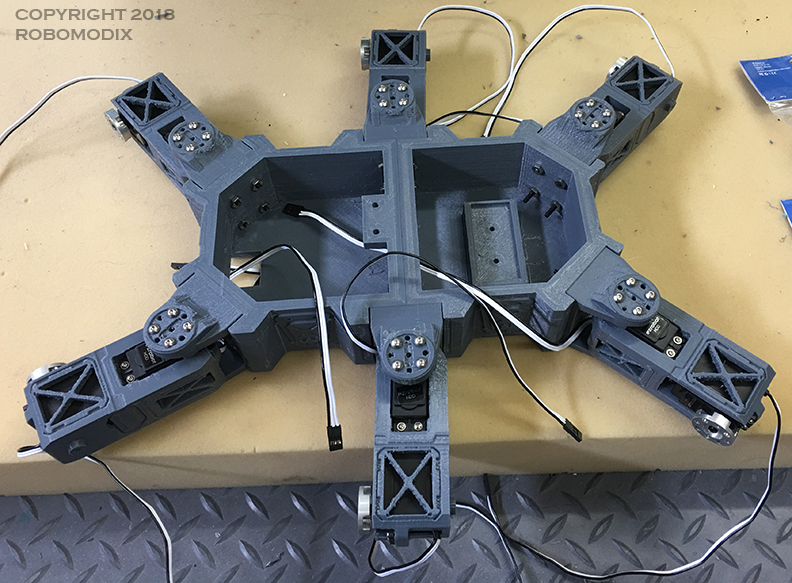
I could only assemble one side of the legs as I am waiting on some servos and screws to arrive.

And here is my first sloppy attempt at testing motion with autopoistion:
Other robots from Synthiam community

Ezang's New Mr. Metal Robot 2020

Bret's Next Hack - Robot B9


That’s a wonderful to see this project! You know I’ve been a huge fan of your progress. Shall we turn this into a product?! :)
The power consumption is nice and low watching the power supply! Weight shouldn’t be a concern.
Is that the six Hexapod project? if so, it looks good at that speed. Crank the speed dial up on the Auto Position to get it moving quicker and check the power again. I think it’ll be within acceptable limits.
Maybe you can work this into one of your next movies? It's good enough to land a staring role (or at least a supporting one). That would give you a budget for the servos needed. Nice work. :)
Hay! I saw B9's legs in one of the shots. They look kinda battle worn. Split and beat up. :D
Very nice!
How many print failures ?
Put some Leds too! and maybe a movable safe small laser ...
@dJ, it’s so nice to do something not Alan related. I have about 100 more of these robots rolling around in my noggin!
This wasnt from a six project, i didn’t try because mine has 18 servo 6 more than six. I just created that in 15 min using autopostion , one half of the walk cycle. I just have it strapped to a stand. No real weight on it. That’s what concerns me. Hopefully I’ll have the other side done in a day or two and can perform a test where it’s actually holding the weight. I hope you are right and handles like a champ!
@dave haha those are THE first pull from molds. I ( cover your ears) cut them in parts so I could work through some mechanics. Not hero pants!
@ptp he will indeed have some some LEds! I had only about 5 print failures and and one printer malfunction. printing ranged from a few hours to 50 hours.
Will, this is awesome! I like the way its a robot type body on the top half - it looks like something out of a quality scifi film!
Tony
I think it has "kaiju" biotech in from "Pacific Rim 2". Such as awesome and fun design Will!
@tony and Justin thank you guys!
That is an awesome print. I will be watching this thread closely.
fxrtst, That is a great looking robot, and an appropriate name.
Wow! Jedi master you are.
Truly fantastic work.
Thanks guys glad you like him! My son is very excited and hopefully get him into one of the videos!
This look soooooooooo cool! Looking forward to see ore of it...exciting challenge! I am sure you are gonna make it! :D
Geez Will, any chance you could bottle and sell some of your energy? :D
This guy is amazing. First impression was Darth Maul in his "dark time" after the split with Obi Wan.
Very cool!,,
Progress today! I managed to do a few color comps, of paint jobs. I got the other side of legs on, AND got the legs to stand and walk..well sorta.
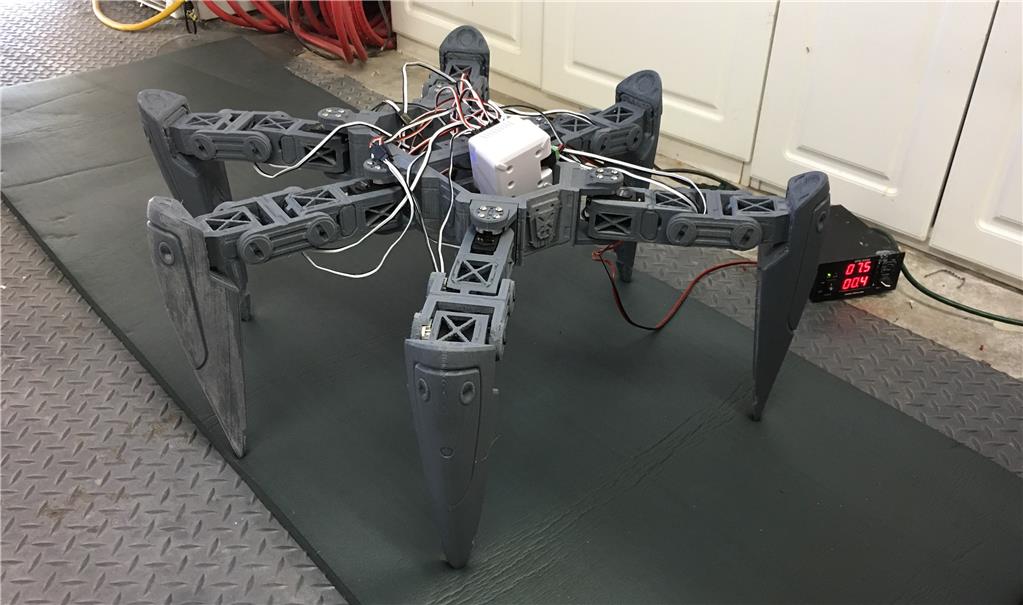
Silly of me to think the EZB could handle the high current with out a brown out. So in the video below you get a few seconds and then "my battery is low, my battery is low" But that's fine as I planned on separating the power for the servos anyways, this was just to see if it would walk and to see if the PETG would hold up. It did and i'm happy! Those HDD servos ROCK!
I watched the load on the power supply goto 11 amps. That is without the additional weight load of the upper body and the battery and speakers. I'm guessing that at peak it will be 15 amps?! But its for short bursts. When walking it went from .07 to 11 amps over a few seconds at a time.
Anyways overall a great day.
First up color comps:
A little action photo assembling the other legs.
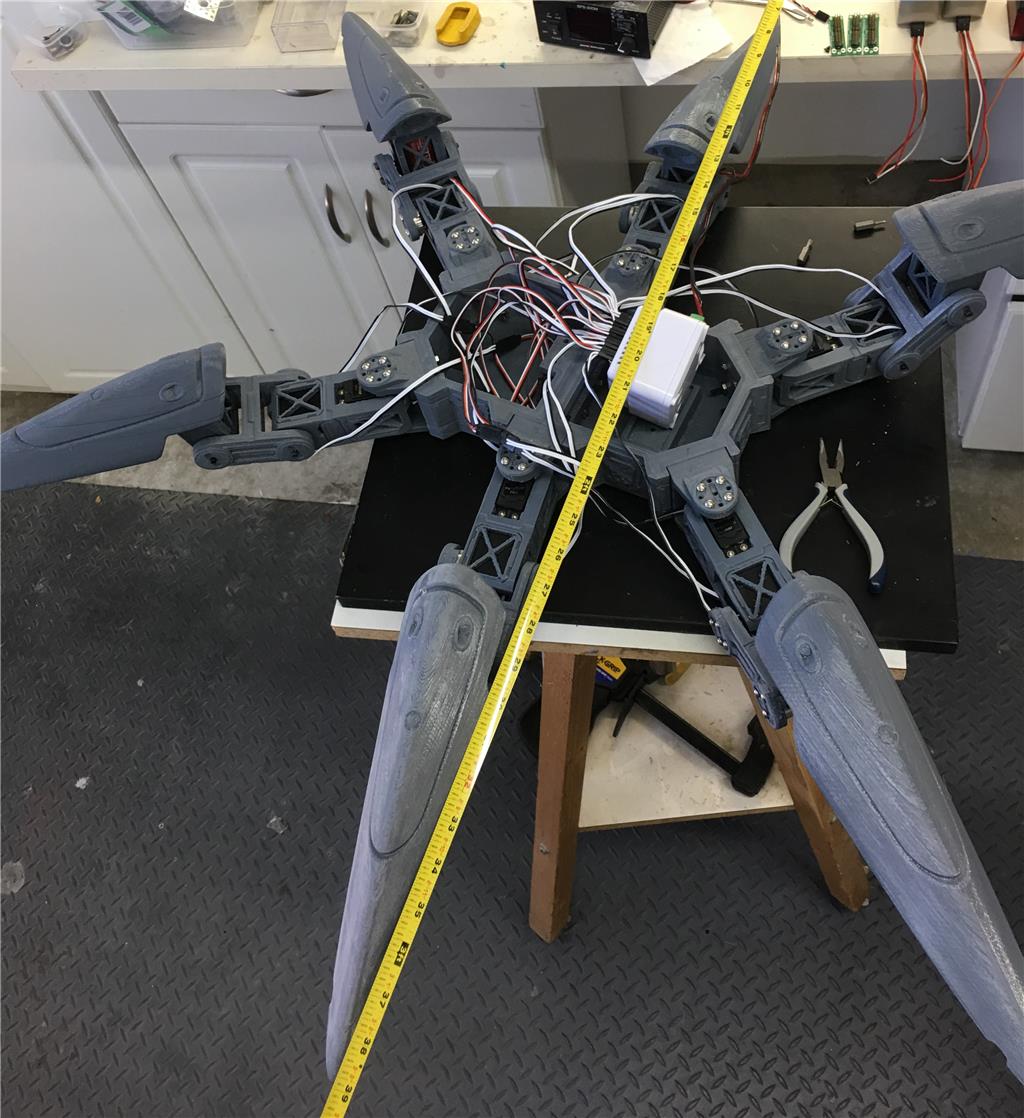
Spread out this thing is massive.....
...how massive? How about 39 inches!
...Its standing..and i dont hear the sound of fracturing plastic!
And lastly, the few moments of Gars first steps...
More to come in the next few days!
Your new robot looks amazing! Very cool work!
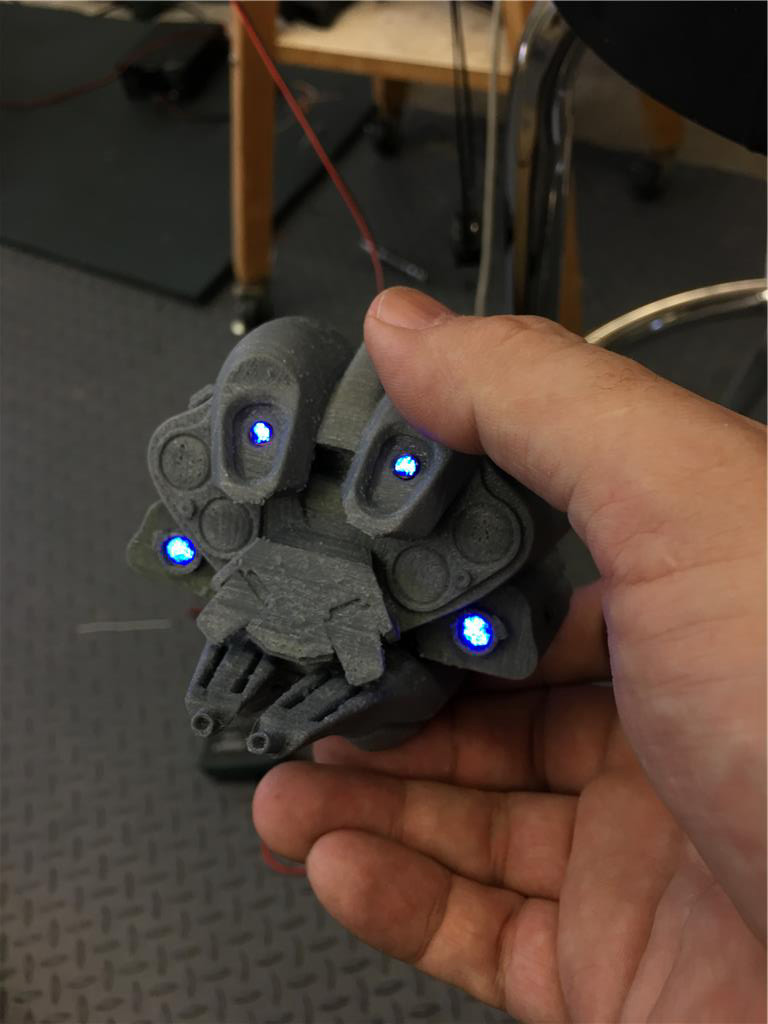
Thinking about chopping up my daughters fiber optic lamp to use for the 4 eyes then I can run a single blink M with fiber optics to the 4 lenses. Looks kinda cool.
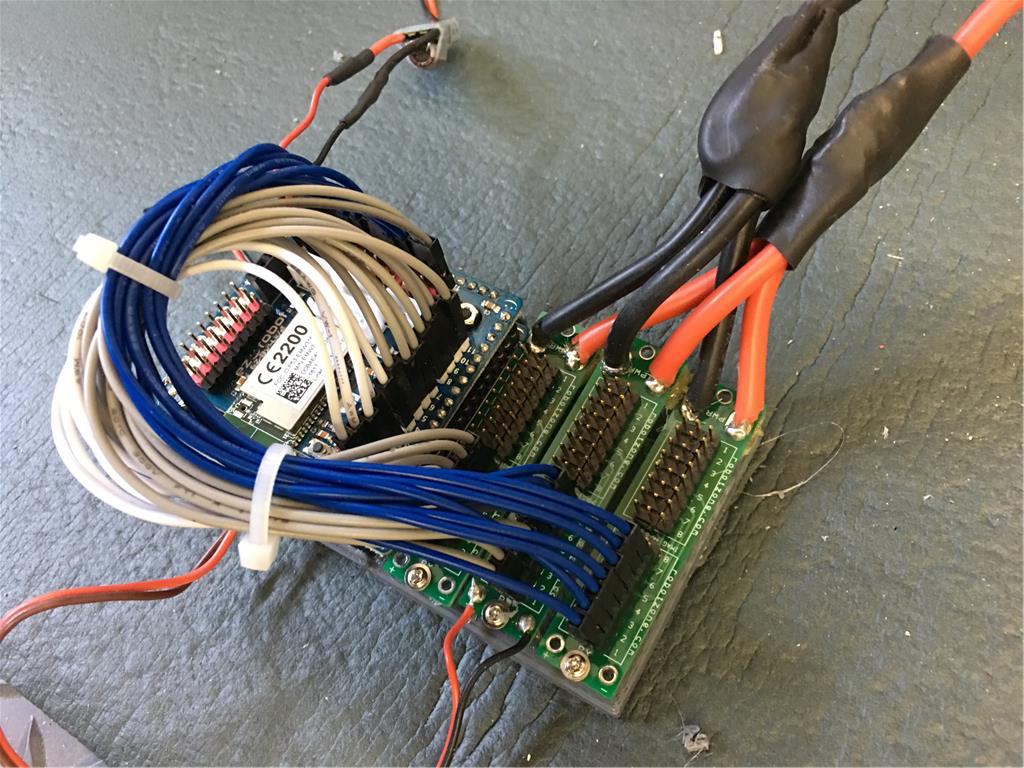
Worked today on rerouting the power. I created a power distribution board which creates a clear path for current. No more brown outs.
This led to a successful second walk. Things are looking ok. The trick is getting at least three legs to touch and three in the air. Struggling a bit with autoposition. None of the servos are exactly in the same position at the same time, and there is the flex in the plastic and backlash with the servos. This will be great to get Unity to export motions to ARC. Alot more room to explore some very complex animations I have in store.
One thing is for sure, it certainly requires a lot of current .. I think I may have seen 14 amps at one point.
Great progress Will!
I like those power distribution boards, do you mind sharing where you got them?
What @Jeremie said... I would love to get a hold of some of those PD boards....
EDIT I think they are servo City servo power boards
Sure, they are here:
Power Boards
I worked today on the eye lights and installing the head rotate. I did use the fiber optic lamp to route the light to all four lenses. Worked out great. I used blinkM so I can control the eyes from software.
Wow! The eye lights (and everything else) look killer! eek
The fiber lamp is such an AWESOME hack! This made him come alive for me! Epic Project!
I would go with the black and yellow coloring option...makes him look really scary!
Thanks for the good documentation, I am enjoying this build a lot! :D
This is looking good! Very cool work!
Thanks Mickey seemed like a logical solution. I bought my daughter a new one from Amazon! LOL.
Another day of productivity. Managed to get the upper body assembled for a test. Those HDD micro servos are pretty strong too. Lets hope they can rotate the body...only had room for a micro on the body.
Todays progress included getting the sound system tested, creating an LED array for the cannon and setting up and building a sound activated lighting (I managed to use Rich's excellent Tut on creating a transistor board to bring up the brightness on the LEDS.)
Today finished all the electronics. So I'm taking a break this weekend and will do an assemble and test of everything Monday or Tuesday. I did manage to get it on my scales and looks like the total weight is around 12.5 pounds.
I am sure your son is excited to see this giant coming to life! Very cool work with the lights, sounds and everything!
Thanks @mcsdaver! Yes he came home one day and saw all the parts closer to being done and he went crazy!
@fxrtst Oh my goodness! The awesomeness does not stop!
For the cannon LEDs you are controlling them with transistors (did you go with Tip120 or mosfet?) then programmatically with PWM or just on/off control?
So this is what happens when you have a dad that works in Hollywood. Fortunate kid. My dad tought me how to play with electricity. He couldn't build me cool robots with special effects though. ;)
@justin, I currently have the gun set up with Rich’s tutorial on brightness and decay script and I’m using TIP 120. I could not get the full brightness up in the LEDs until I used this transistor set up. But, will most likely have to go with another script/process, as I don't want the gun to activate with all the other sounds. Just the gun sound should activate the LEDs.
@dave haha my dad AND grandfather both were electricians. My grandfather owned several businesses including an electrical wiring company for commercial and residential wiring and an electric motor rewind shop. I spent most of my childhood there as it was a family affair and my mother father sister grandfather grandmother all worked there. I got to play with a lot of cool things like spools of copper wire.
And I still ended up a make up artist in Hollywood. To my grandfathers dismay!
Just more assembly and testing today as I prepare for a full weight walk tomorrow. It’s beginning to look epic!
Epic is the perfect word! eek
Ya, Grandpas of our generation had different ideas of who wore and played with makeup. Did your's ever get to see the success you've gained with your talent? I bet he would now understand and be proud. :)
He did live to see me make it to Hollywood. Both my dad and gramps were both very proud and did their best to see the films I worked on.
Not quite walking yet. Maybe for awhile. I'm pretty sure that I will need to do some modifications to lighten the load on the upper body, if he is to walk. That may include reprinting the torso with thinner walls and less infill. I also may modify the arm design making them one whole arm as opposed to the two separate parts. This will give me one single wall and lighten the weight.
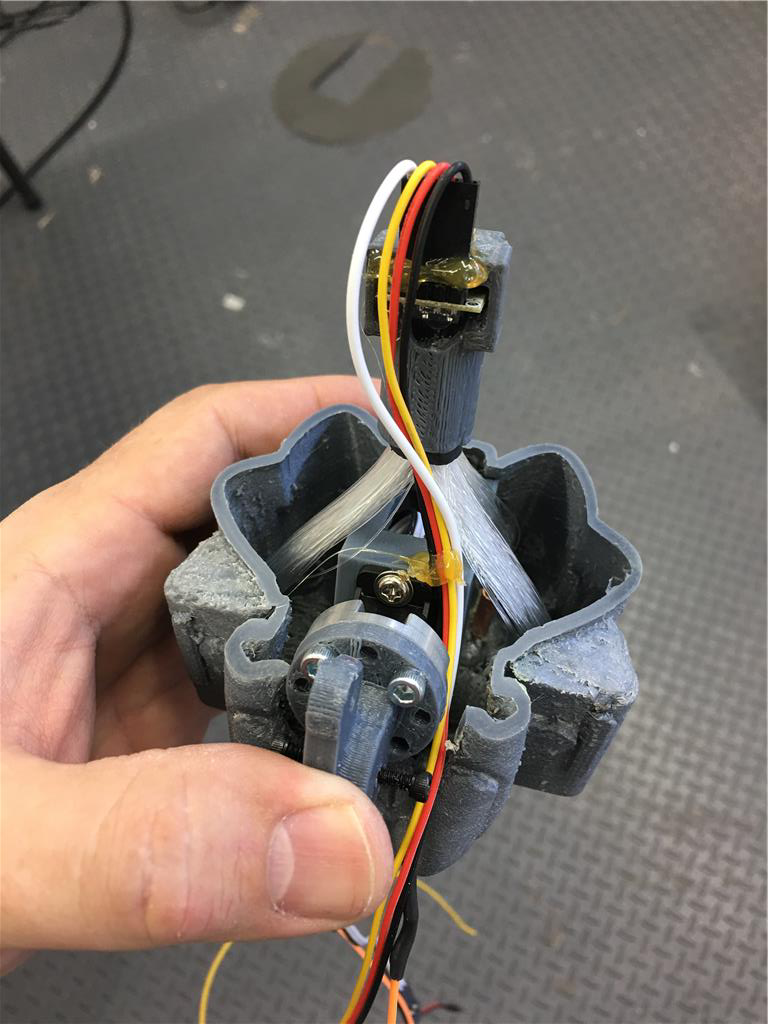
As I had suspected the micro servo is struggling to rotate the body with its weight ( the body is too small to place a standard servo inside). I've ordered another micro servo with higher torque (6 kg/cm). Combined with lessening the load should stop the shimmy of the body that can be seen in the video.
I also worked on a solution for wire management, as seen here in a test.
Ahh, a setback. That sucks. Hopefully the stronger servo will help. I'm sure you want to reprint as a last resort. tired
Very nice wire management!
Such is the way, for prototyping.
I've managed to move some things around in the inside of the body (digitally designing that is) and I'm going to get a full sized servo in there. That will resolve the jitters. But still thinking about reprinting the body shell and arms to reduce the weight. That will take some time...so prolly taking a break for a week while they print.
Sweet wire management!
Gar looks like he a a tad too much Saurian brandy... but still impressive as hell!
Hehehe, yes! The great thing about 3d printing the parts is just a redesign and then waiting for the parts to print. I love the star trek replicator process. Just wish there was "rapid" , in rapid prototyping. LOL! And I'm one printer down...so that is slowing things down.
And now my son might be changing his mind about the cannon arm....
stress stress stress
I think the cannon arm is a great idea! I hope he goes back to liking it!
Well it was a compromise. I think this may be for the better. We now have a three barrel gun and a new solid arm vs the double arm design. This arm is also now jointed and will be bent as the arm comes to rest at his side and then extends to shoot. I ran out of digital ports so I will be pulling this off with a spring and cord.
That's even more badass! :D
I'll have an update soon.
I was stuck in 3D printer h*ll. I had one go down about a month ago, then other two went down at same time. Been sometime to trouble shoot. Finally up last night but now gotta play catch up. One part left for the gun arm. Then on to the new left arm and new body shells. I can tell you it was worth redoing. I've cut about 75% weight on some parts.
We are all waiting patiently! :D
Lighter and cooler at the same time! This will look amazing as it walks around!
A small update while I wait for two 53 hour prints (new light weight body) to complete. The new arm, with rotating elbow. The interior of the guns were printed on my Pegasus SLS 3d printer. I had no idea when i was designing that the details would be so small. But the printer managed to print those very tiny ( slightly thicker than a hair) posts. Hopefully the detail can be seen in the final gun.
WOW! eek
I like the SLS prints. I am in the process of building a SLS printer so there is some motivation.
I have a love hate relationship with this printer. I supported them on Kickstarter and the nightmare began. But eventually after throwing money at it it’s printing good. Funny thing is they had a successful laser cutting printer company so figured it was a no brainer low risk investment. Nay.
Hey guys. A small update. I've been pretty busy with summer fun so not a lot work time on the robot. But, I did have a few hours today to test out the cable actuated arm concept. I had run out of digital ports and really felt like the robot needed a bending shooting arm.
So i put pen to paper and came up with a simple design, where a cable ( a dacron cord in this case), and a spring set into motion the arm with the bend. Its quite simple. As the arm rotates, it pulls a stationary cable tight, and that cable pulls up the lower arm. There is another cable on the opposite side that has a spring and acts as a return, for the arm to straighten.
Here is a quick video of that idea in motion.
Great idea! I'm convinced! :D
That's brilliant Will. I really like the smooth motion. The little bit of bounce makes it more life like in my opinion. cool
Thanks Dave. It was just a quick POC, i think its the right idea...hopefully the finished arm will be a bit more ...predictable!
Dude, FX, I just saw this and I am blown away! , I wish i had the 3d skill you have. You could totally sell that, even if just for a 3d print diy deal. Great Work
Thanks Josh!
Hey guys! Been a pretty busy summer....visitors and ocean visits...(its hot here!) But my son has reminded me we have unfinished business so back to the robot today!
Today was a simple movement test with all the weight it will carry sans battery. I redesigned and replaced the micro servo in his waist for a standard servo and added a bearing and housing to keep it from slopping around. Its pretty sturdy now and I'm happy with it...i also reprinted the body shells to save on weight and you've already seen the new gun arm.
In this video the arms are literally taped on and trying to moving him around with all legs on the ground. The most challenging will be getting a good walk cycle when he is all assembled. Things are shaping up!
Thanks for the update. Looking good! Big improvements. This is going to be something very special.
Wow! Great movement- so impressive!
Well I played with walking bit today. I had always planned on using the tripod gait as that's the fastest locomotion for a hexapod. But because Gar has the upper body, it makes him front heavy. And the three legs that form the tripod aren't close enough together to keep him from tipping over.
So I looked at the other two gaits, one is called the wave (which in my opinion is too slow a walk for Gar) and the other is called the ripple. The ripple is kinda version of the tripod (three legs up and three legs down) except if does it one leg at a time in the tripod sequence. This will allow for 5 legs to hold the weight at all times and help him balance during walking.
The downside, is it is very difficult to animate using Auto Position . This is where the Unity to ARC animation bridge would come in handy. More needs to be explored on that front.
Next I will start to disassemble, fill and sand the parts and start priming them. Also finish off the gun arm. At this point everything will be ready for the final paint job.
This sure has drawn out..hopefully some progress soon.
It’s certainly been a labour of Love, I hope your son really appreciates it all! ??
It’s a shame about not being able to use the tripod gait, as I like that one best on my Hexapod ( ziggy ). I also like the wave but as you said it’s far to slow!
Your right about it is very difficult to animate using Auto Position, I spent hours going back and forth, trying to get the positioning just right on the Gaits.
Can’t wait to see a video of it walking.
@fxrtst I hve not been posting much lately, and the Virtual JD kind of grinded to a hold since I could not really figure out how to rig him properly to create a walking motion...but I am still learning a lot of Unity, and I have been making some progress with my own project! So we might have to check once more how far @ptp made it, but I have no doubt that animations can be send from Unity to the EZ-B! It works very well with Unity and the Rasberry Pi. I chose to port my robot to Linux, so I do not rely on a Windows driven PC!
Also what is very cool about Unity is, that we can develop an app for Android phones, so Gar can have his own custom Interface if you would like to go that way!
Great project, I am always happy about the Updates! :)
@cem, yeah its a bit disappointing..but hopefully with some speed the ripple will look ok. I've seen a few hexapods on youtube moving quite fast and it looks acceptable. I burned out a servo yesterday trying to do a walk cycle. Not easy to replace. :(
@mickey666maus That would be cool to develop an android app...but I do plan on using alot of the functions in ARC with this robot, so I was hoping for a way to record motions in unity and to export to ARC. That way i could import and assign some buttons for walking. I looked into it and you can definitely export csv xml files from unity.
I am open to any suggestions.
Update. I'm leaving to do reshoots for Avengers 4 for a few weeks. I still have not worked on this project for a bit. I ordered 12 servos that are a bit more powerful than the EZ Robots. They have a few more KG/cm per servo and less backlash. Hopefully I can get this reassembled and painted when i get back. I'm looking forward to moving on and creating new robots.
When will Avengers 4 be out? I want to see it! Hope you get time for your robots soon. I am sure everyone will be glad to see Gar walking.
Don't work too hard Will.
Current release schedule for 2019: Capt Marvel Mar 8, Avengers 4, 3rd of May, Spiderman 2 July 5th....and on and on... :)
Well I'm back from shooting Avengers 4 and will finally finishing this guy up. Stay tuned.
We will! :D
I found some 30 kg/cm servos online and I'm going to skip over the 20 kg/cm versions that I bought and try out these new ones for way more power. I will need to source out a 8.4 volt battery to fit in the space I made for the 7.4 v one. After I get CES out of the way I'm hoping to finally finish this up...If i wait too much longer my son will be too old to play with toys!
:)Holy Jebuz! That looks like a monster! I just saw something similar in episode 2 of that new space series Night Fliers it had a killer Laser!
Resurrection (I hope) coming next on my channel.....all-new resin printed parts for small details! (Joy to my now 9 year old son's ears)
My ears as well. I’m a huge fan of this robot!
Me too!! Glad to hear it'll be featured on your channel!! :)
Outstanding! I was wondering what happened to this little guy.