



















Project:
By request, my 6 year old son wanted me to design and build him a Hexapod. So I started to whip up some designs in Zbrush and together we decided what he would look like. "Main thing he has to have dad, is an arm cannon!" So we got that. Then I thought it would be cool to have a robot kinda part of or riding the hexapod. So kinda a centaur bug/robot thingy.
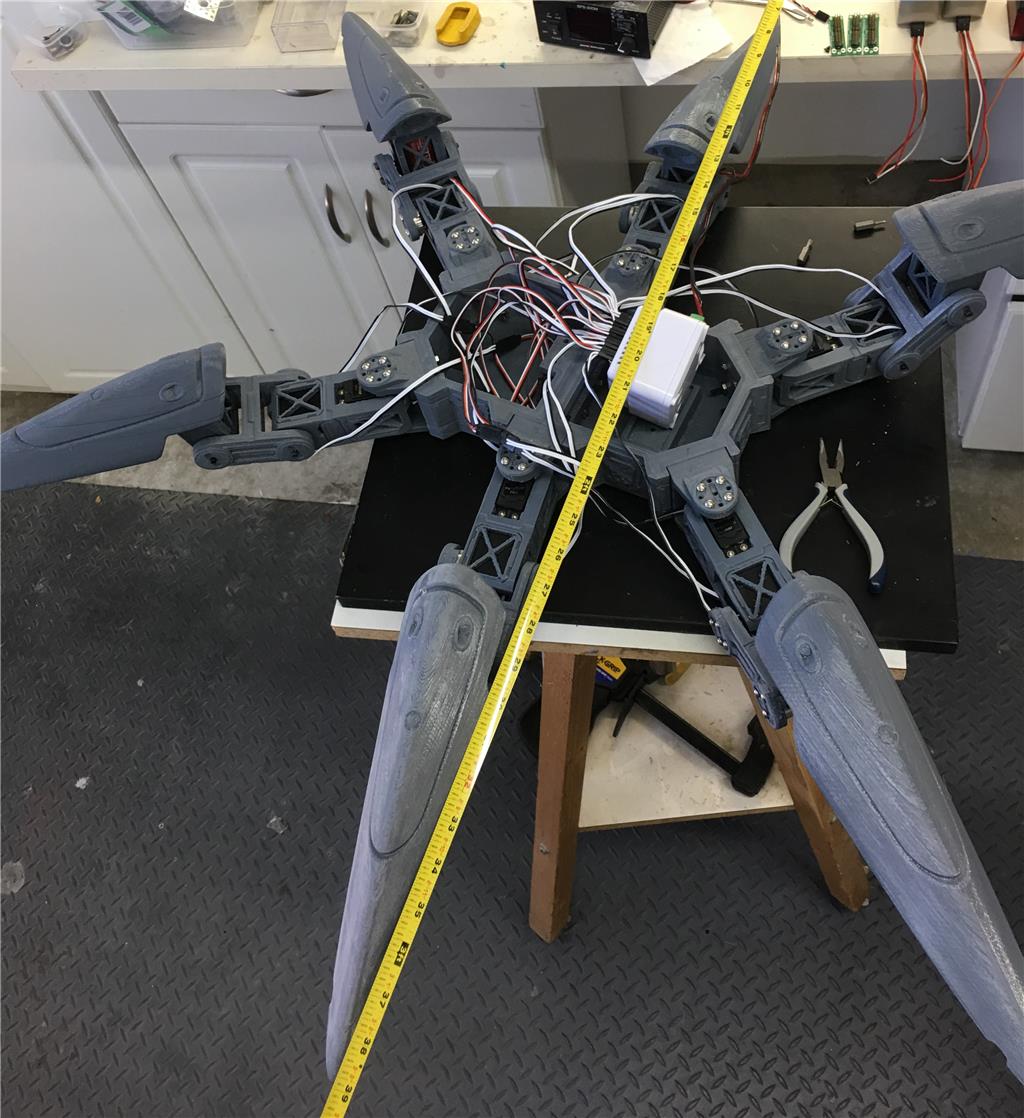
First thing I had do was figure out was how big would be too big? There are alot of reasons why not to go too big, which I ignored. So from an engineering stand point, "will it walk?" is the big question. At first I thought it would be about 5 pounds, then it went to10 pounds and now it might be around 12 pounds...so again time will tell. Maybe it walks once or 2 feet then crumbles!
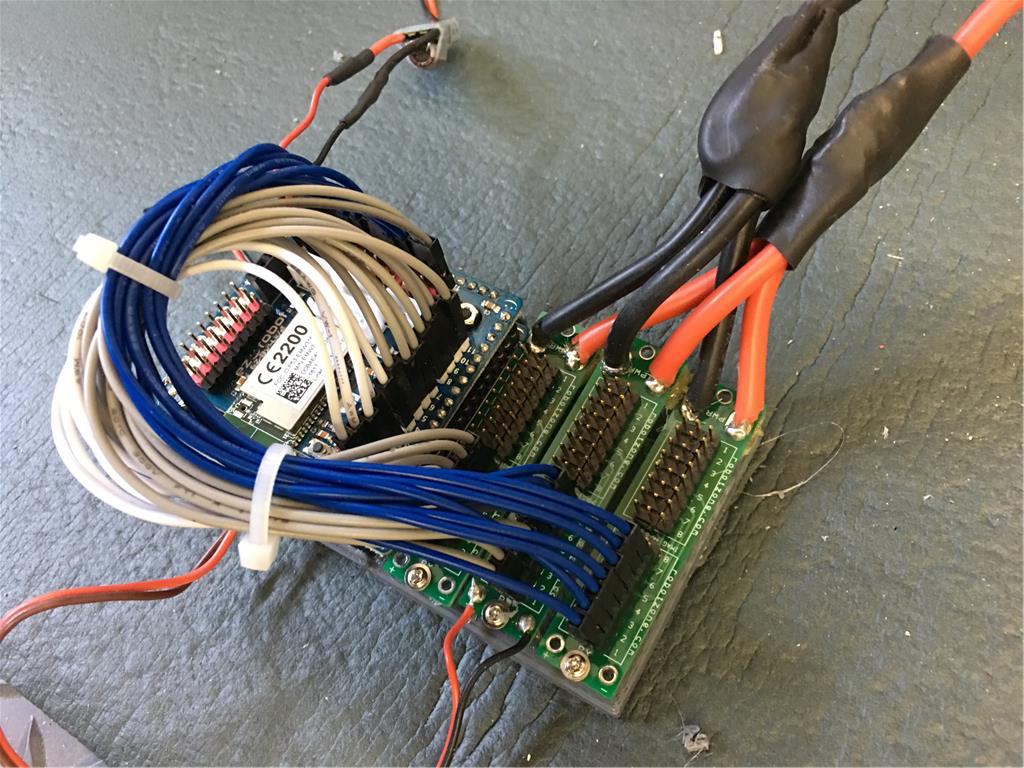
I sourced out the materials and batteries. Knowing this was going to be a 23 servo design, I wanted a good battery and and chose a 7600 mah lipo. Maybe it will run for 15 min underload... again untested, time will tell.
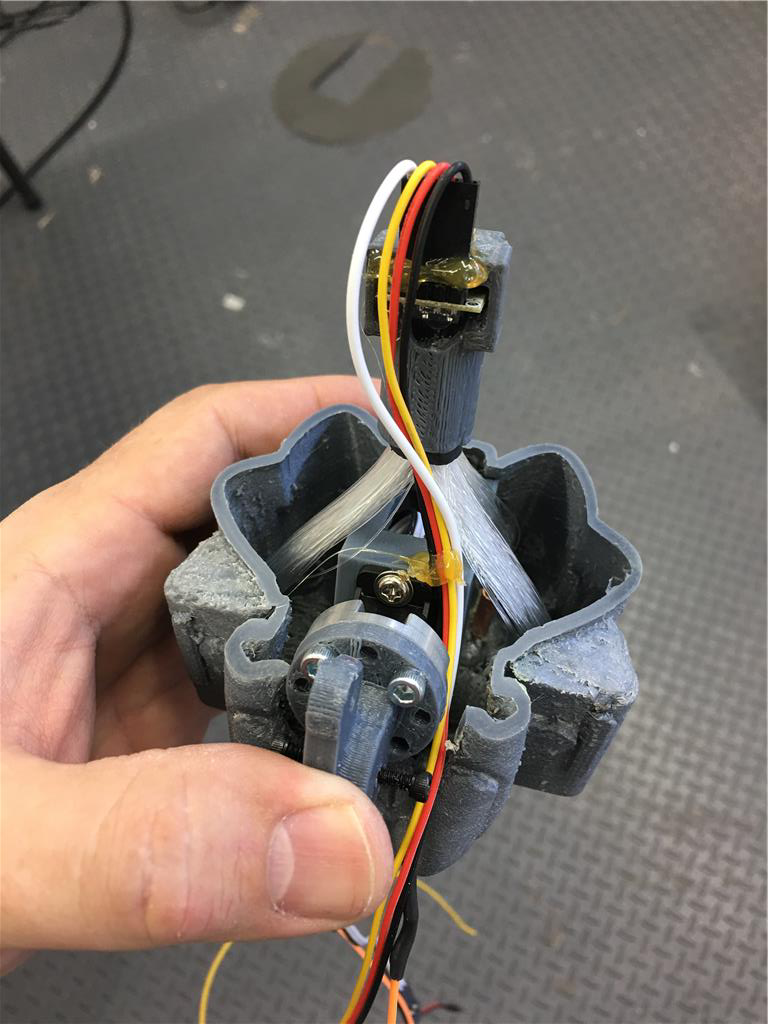
Finally I chose PETG for the print material, due to its strength. Two weeks of printing on 3 printers 24/7. There ended up being 53 individual parts.
The Motions include 18 axis for the legs, waist forward/back tilt, waist rotate, cannon arm up and down, head up and down and rotate. 23 axis in total. The body is comprised of EZ Robots micro servos and the legs and tilt are the HDD servos also from EZ.
There will be an EZB inside and camera in his chest. A Bluetooth amplified speaker system onboard will allow us to play TONS of robot sounds from BlueZone.
I will updated this project as I finish goals, but if he doesn't walk due to weight or burning out servos due to stress, I will most likely abandon this build, as the next logical step would be to move up to dynamixels, but that would require $5000 worth of servos. A bit much for a toy!
So lets get started!
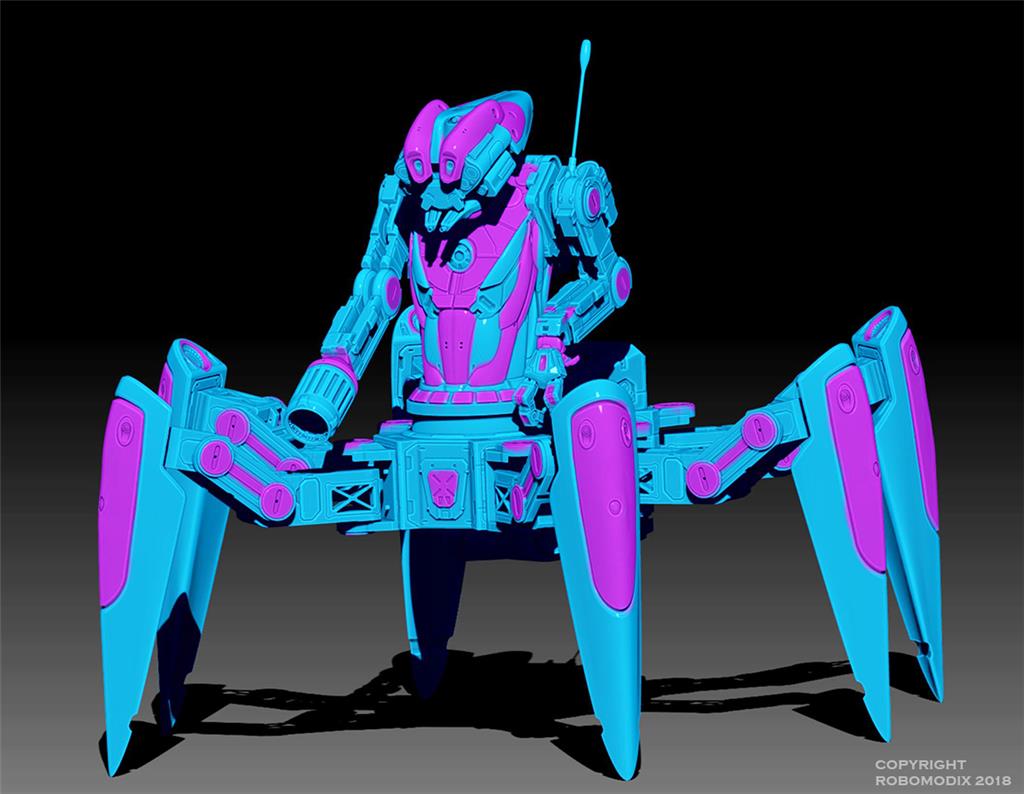
Here is a final design in zbrush and keyshot


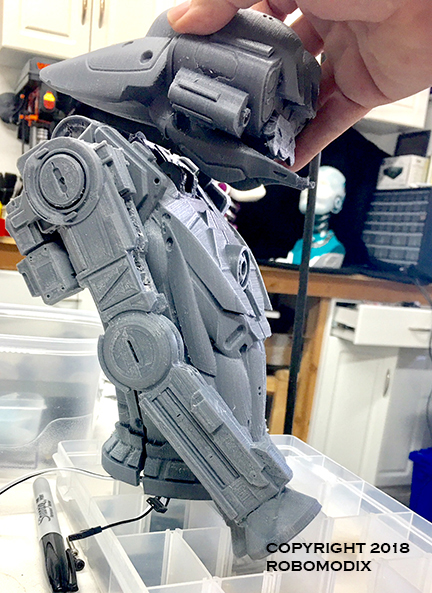
Then came the modeled parts each one 3d Printed.

Here I've started adding the axis to the body

Here I continue on with assembling the main chassis
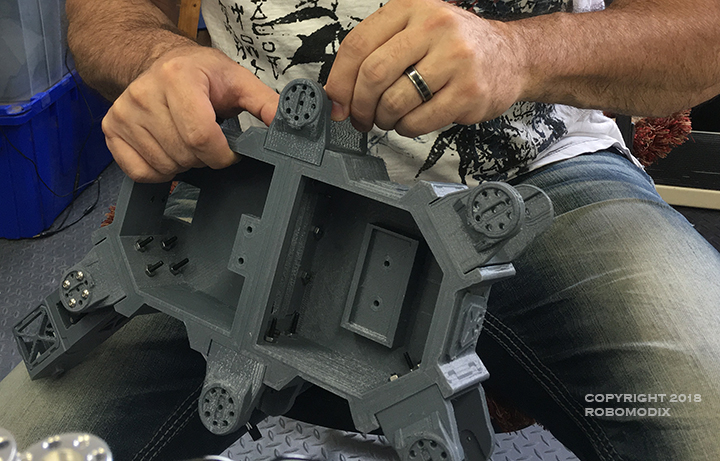
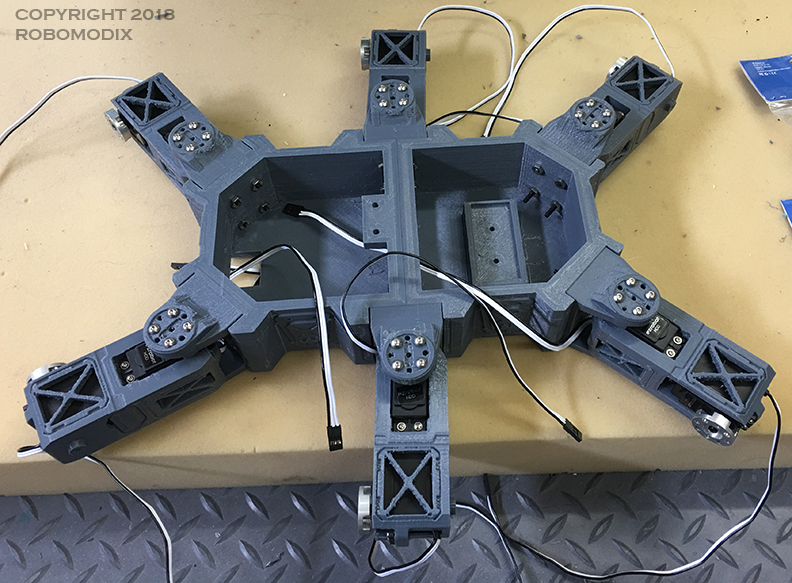
I could only assemble one side of the legs as I am waiting on some servos and screws to arrive.

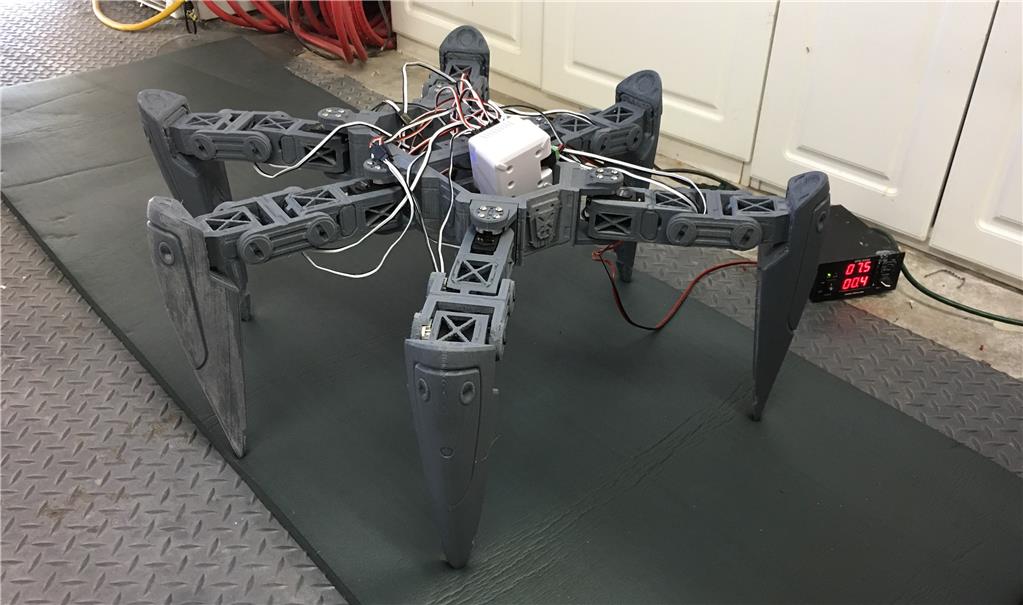
And here is my first sloppy attempt at testing motion with autopoistion:
Discover more robots

Cardboardhacker's Mtr(Mechanical Tracked Robot)

Cliffordkoperski's Hydrualic Arm And Hand

That’s a wonderful to see this project! You know I’ve been a huge fan of your progress. Shall we turn this into a product?!
The power consumption is nice and low watching the power supply! Weight shouldn’t be a concern.
Is that the six Hexapod project? if so, it looks good at that speed. Crank the speed dial up on the Auto Position to get it moving quicker and check the power again. I think it’ll be within acceptable limits.
Maybe you can work this into one of your next movies? It's good enough to land a staring role (or at least a supporting one). That would give you a budget for the servos needed. Nice work.
Hay! I saw B9's legs in one of the shots. They look kinda battle worn. Split and beat up.
Very nice!
How many print failures ?
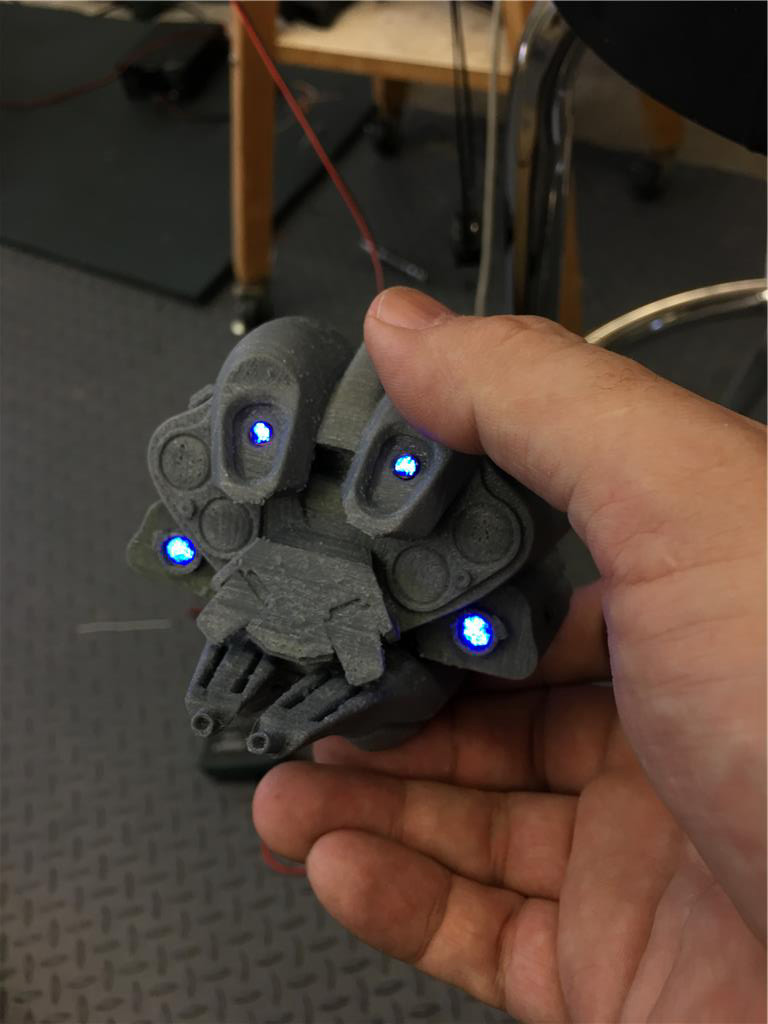
Put some Leds too! and maybe a movable safe small laser ...
@dJ, it’s so nice to do something not Alan related. I have about 100 more of these robots rolling around in my noggin!
This wasnt from a six project, i didn’t try because mine has 18 servo 6 more than six. I just created that in 15 min using autopostion , one half of the walk cycle. I just have it strapped to a stand. No real weight on it. That’s what concerns me. Hopefully I’ll have the other side done in a day or two and can perform a test where it’s actually holding the weight. I hope you are right and handles like a champ!
@dave haha those are THE first pull from molds. I ( cover your ears) cut them in parts so I could work through some mechanics. Not hero pants!
@ptp he will indeed have some some LEds! I had only about 5 print failures and and one printer malfunction. printing ranged from a few hours to 50 hours.
Will, this is awesome! I like the way its a robot type body on the top half - it looks like something out of a quality scifi film!
Tony
I think it has "kaiju" biotech in from "Pacific Rim 2". Such as awesome and fun design Will!
@tony and Justin thank you guys!
That is an awesome print. I will be watching this thread closely.