
All Community Content

Synthiam Credit
Log In

Earn Free Credit
Share your robots, answer questions, and help others — earn credit toward ARC Pro, AI credits, and robot swag.
Exosphere
What is Exosphere?

Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Synthiam Swag
See All Swag

Gaming Mouse Pad
Recent Robot Skills
View All

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

PCA9685 Servo Driver
Drive 16 servos over EZB I2C with a PCA9685 PWM controller, using ARC servo commands and...
Featured
Discover EZB WiFi controllers by name, auto-bind connections, avoid IP management; live discovery and multi-EZB support for ARC.
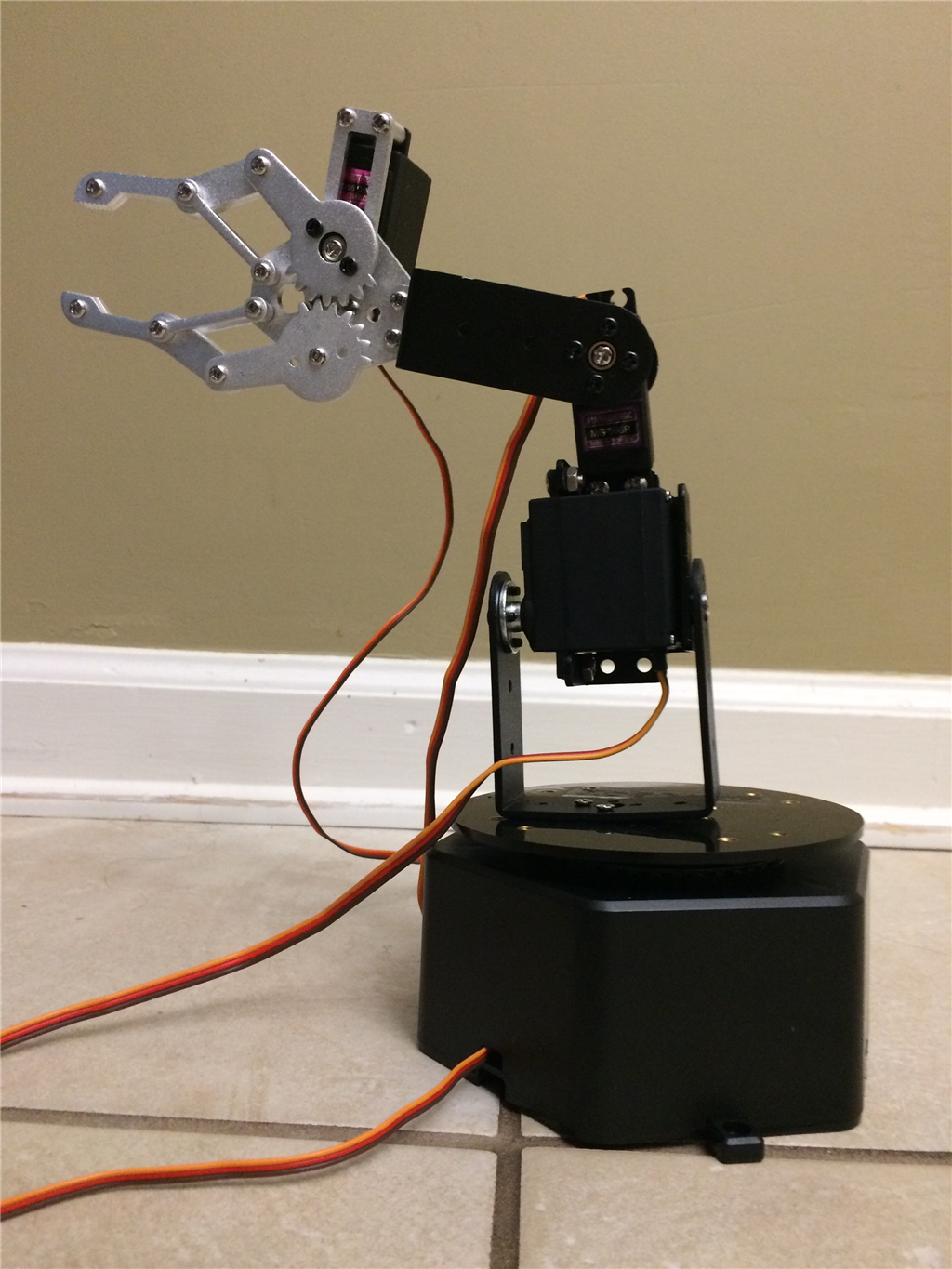
Featured
New robot arm in EZ-Builder with a gripping personality-demo video coming next week.
general
I Cannot Use Controlcommand Block In Blockly
Since the update, I cannot use control command block in Blockly. There is no drop down menu when you click it. Is there something...
DJ Sures |
robot

Rickymahk2013's Mark 1 Robot
Develop robots with Synthiam, build the Mark 1 DIY robot, publish a DIY book and showcase projects at international conferences.
rickymahk2013 |
robot
DJ's The Real Wall-E
Real-life Wall-E built with EZ-B Robot Kit uses camera, servos and voice to track motion, color and faces and react with sounds and dances.
WiinterU |
robot

Louis's The Real Wall-E By Louis T
Build a lively Wall-E with Synthiam ARC: custom carbon-fiber parts, geared servos for wheels, neck and arms, animated eyes, tidy wiring, LEDs and...
WiinterU |
question
Arms Go Up
JD keeps placing his hands up after actions when the arms should be down. I can't find how to fix this. Can you help me troubleshoot?
WiinterU |
question
Rover 2.0 Compatible With ARC?
I recently got the Broookstone Rover 2.0 as a gift. I started watching some videos about how you can control the Rover 1 with E-Z Builder software. After messing around on it, I noticed it cannot connect to the Rover 2. I am wondering if I am doing something wrong or if the second one is just not compatible with the software. So you know, I have no...
WiinterU |
general
Forum Thoughts
@DJ I've have had a idea about the forums for a long time. You have always listened to us and welcomed our thoughts. So, (LOL) with the implementation of Athena I figured it would be a good time to bring it up. Looking at the forums front page you see the different blocks that represent the different post. What do you think of having a scrolling...
JustinRatliff |
general

Batteries ... Car Booster/Jumper
Has anyone tried using one of the booster/jumper batteries for cars in a robotic project? Link Here
WiinterU |
general

The Wild Robot - New Animated Robot Movie
Check this out, a new animated robot movie! It gives me Iron Giant vibes...
DJ Sures |
Misc
Roll Pitch Yaw v2
Rotate and position camera or object with roll/pitch/yaw controls; save camera settings; bind or monitor a 3-value EZ-Script array for live...general
Lidar ... Purchase
@DJ What Lidar, in your opinion works best with Arc? Others can chime in also. Thanks
DJ Sures |
general
Arc Pro Membership Question
If someone purchases a Arc Pro membership now, will it extend to Arcx when it is released? How will it work? Thanks
DJ Sures |