
nicolappp71.np
Unknown Country
Asked
— Edited
My First Car With Encoder
Good morning everyone. I built my first car. 2 motors with encoder. When I drive it manually everything is ok. When I navigate with my RPlidar A1 the problems start. The map is ok but when you move from one point to another it continues to make corrections and often, even if the trajectory is straight, you lose orientation especially when you rotate quickly. He seems to be "going crazy". I used the parameters from the "BEST NAVIGATOR" video tutorial. I put a mini PC on board. I'm using encore counts. I'm using the encoder count even though I have a feeling that the "BEST NAVIGATOR" doesn't use it.
Can someone help me?

Hmmm... firstly, the better navigator doesn't require an encoder if using the RP lidar, in my experience. I find the encoder data messes up the slam pose hint. Here's my recommendation...
first, make sure you do not have an encoder robot skill added. The encoder robot skill will push data to the NMS hint event, even if the better navigator is not configured. That will cause the better navigator to process the data selected by the drop-down for the pose hint source. The pose hint source could be empty or have invalid data in it. So, remove the encoder skill completely
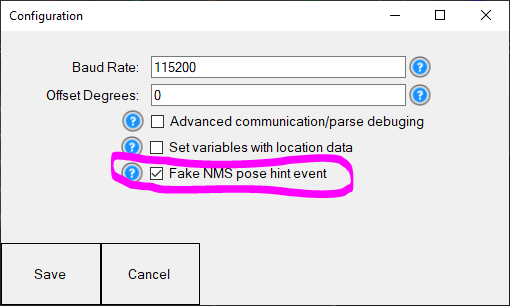
in the RP lidar configuration, enable the fake NMS pose hint event by checking the box
in the better navigator, select the pose hint source as "External."
slow the navigation speed down during testing. Make sure the robot is moving very, very slowly so that you can verify the configuration and physical setup. The slower it goes, the more accurate it'll be, considering the RP lidar scan speed isn't that fast.
lastly, make sure your lidar is in the dead center of the robot.