
Robot Building Questions

Synthiam Credit

Earn Credit
Contribute to the community and earn credit to lower the cost of Synthiam robotics products and subscriptions.


Recent Robot Skills

Inverse Kinematic Ar…
Control robot arms with inverse and forward kinematics, converting X/Y/Z positions into joint motion...

PCA9685 Servo Driver
Convert an EZB I2C bus into a 16-channel PCA9685 servo controller, exposing V0..V15 with...

Rplidar
Slamtec 360° LiDAR driver: calibrated, offset/rotation-adjusted scans published to ARC NMS for...

Featured
Real-time servo position input via Arduino ADC over I2C; supports Nano (6 channels) or Mega (16), configurable I2C address and scalable chaining.

Featured
Modding two Omnibots (regular and 2000) with two EZ-B kits; rad base shelved for noise but may return if drivetrain can't handle it.
question
Need Help With Key Command.
I want to be able to press a button lets say "Z" and once pressed and released I want a servo to go to a certain point and then return back to where it started. I know how to make it go there while I keep a button pressed and return once I release the button. But I need it to go there and then return with only a tap of the key. Does this...
Foamtastic |
question
How About Python Support? Or A Low Level Api So We Can Write With Our Own Open
Do you know what code drives the Curiosity Rover on Mars ? Python It would really be cool if you support the Python language... or at least release a low level API so I can write my own library. I'm looking for a spy tank to start hacking.
Rich |
question
Is There A Way To Adjust The Top Menus
On my monitor , it covers about a fifth of the screen and wastes a lot of space. It also covers the top of the windows so I cannot move them down. It is pretty, but I personally would like it smaller so I can get some work done. it gets frustrating to me. Just need to know if there is a way out of this. Thanks,
MovieMaker |
question
Not Able To Update Over Usb Serial
I'm trying to update the firmware of the EZ-B inside my robot. It's connected to the PC over a USB-Serial converter. Every time it just hangs at "Uploaded". However, when I switch to the bluetooth module, it works fine. Any reason why?
Rich |
question

Japan's One Small Step For Robots, One Giant Leap For Robot-Kind
Japan's one small step for robots, one giant leap for robot-kind interesting... small robot
jdebay |
question
Dj Sures Omnibot 2000
Hoping someone can help me with this.I'm currently assembling parts to build my own and had some questions. 1. in the showcase it calls for a motor controller. Do I need 1 or 2 of these? I've read different thoughts on the subject. I plan to use Omnibots original drive train system for now. 2. What kind of motor controller? Looking around it seems...
Xuven |
question
Knex-Mech-Warrior-Mad-Cat Project Anyone
https://www.ebay.com/itm/Knex-Mech-Warrior-Mad-Cat-14140-Collectible-/130981615957?ssPageName=ADME:L:LCA:US:1123 mad cat project anyone... j
irobot58 |
question
Roomba Tutorial Clarification
I have a Roomba model 4210 discovery that do used in the tutorial. Do I only need to apply power and it comes on ordo iI need to press a button each time to prepare for a connection to ezb. If I must press a button each time I can't see the Roomba being a useful base for beer robot unless just use the motors and case and remove everything else. Can...
MovieMaker |
question
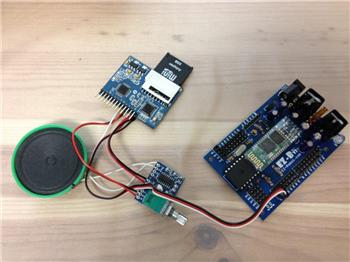
Alternative Mp3 Trigger Sound Modules
I started testing some alternative MP3 Sound Modules, my goal to get similar functions but at 50% less than the cost of MP3 Trigger ($50 + s/h)....
tevans |
question
Android And Ios
I was wondering if it as possible to write programs with the SDK for use directly on an I phone, ipod etc or android device. so the device connects to the robot directly and doesn't use a pc at all
thetechguru |
question
Nkh Robot Revolution Documentary
I guess we aren't the only ones recognizing that we have a Revolution on our hands! We are definitely in the age of practical Robotics, it's awesome to see more development across the globe on humanoid robotics. Maybe some good can still come out of such horrible disasters such as the Fukushima Daiichi plant. I'm really excited to see what the...
Toymaker |
question
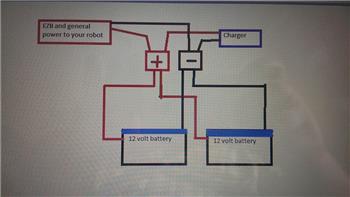
Another Question For Josh Or Anyone
Josh, On the two 12V batteries that you order from Ebay, Which charger can I use? I have a Large Car battery charger and a small Motorcycle Battery...
MovieMaker |