





























































































-635353562186322812.png)




















































































































































Hi all,
I'd like to share a video I just took of my full size Lost in Space B9 robot that's controlled by two EZ-B controller boards. Right now they are controlling limited movement and voice response of a few motors, lights and sound files played from a Sparkfun MP3 Trigger board. Although I'm just starting with the animation and have more building on the actual robot the result (mostly thanks to the EZ Robot controller board) is shocking. Please have a look at this (4 minute) You Tube vid and enjoy.
Please excuse some Technical camera lighting and sound issues. This is the first time I'd made and posted a vid online.
EDIT 8/2/13: Just realized I have no good pictures of how my B9 will look when complete. Here's one of the actual TV robots from the 60's TZ show Lost in Space and one recent shot of where I'm at with my build over 1 1/2 year after I started. Enjoy:



Thanks, Dave Schulpius
Discover more robots
Billderwent's Boris!

Bhouston's Inmoov's New Gripper

Hi all, Thanks to Tony (Toymaker) I have a starting place for my arm design; Motors. If you read back in this thread you'll read where Tony (Toymaker) had very kindly sent me some Bosch VMC Actuator Motors. These are very strong and quite little worm driven DC motors with built in pots for position feedback. These seem to be a little hard to find here in the USA but Rex (rgordon) seems to have found them. More later on this. You can read about them here:
www.ipar.nl/assets/files/Leveranciersinformatie/1540_Kat_EM_en_LoRes%20elektromotoren.pdf
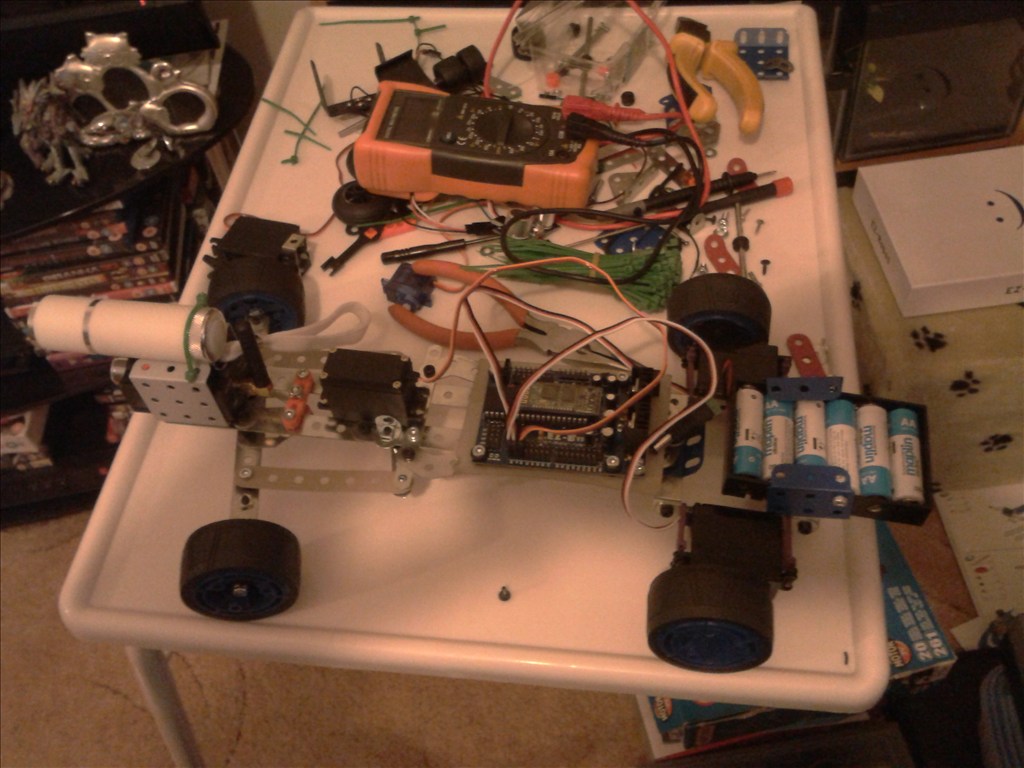
Today I did a few tests to see if they will work like I want. I was very happy with the results. I really think these will work nicely. Now that I feel that they will work for me I need to start learning how to control them with EZB. I plan to also use a Kangaroo X2 board to turn these from DC motors to servos that ARC can control and make the arms hopefully look like the real thing.
Here's a vid I took of my testing:
Thanks PLEASE keep me updated
Great update and showing what you are doing.
:)

 J
J
Looking good!
Hi Dave
With my double motor shoulder, both motors are controlled from one smart servo board (with only one feedback pot used) and it works great. The motors are so precision that they just mechanically sync even thought they are 2 different worm drives. I am sure this will be the same with your Kangaroo x2 setup, just wire the two motors in parallel and wire one feedback pot to only one channel of the dual motor controller, leaving you with a free motor controller for another Bosch motor servo further along in the arm (probably where you dont need so much torque).
My robot shoulders are running happily at 18V with no problems, remember that these drives are unique in that the motors are only drawing current when attaining their new position, once at the target position (unlike regular servos) these motors draw no current at all! Another amazing thing if you put an ammeter in circuit while you are trying to stop the shaft moving (like you did in the video) then I bet the current drawn would probably be less than 300mA, these are brilliant motor drives!
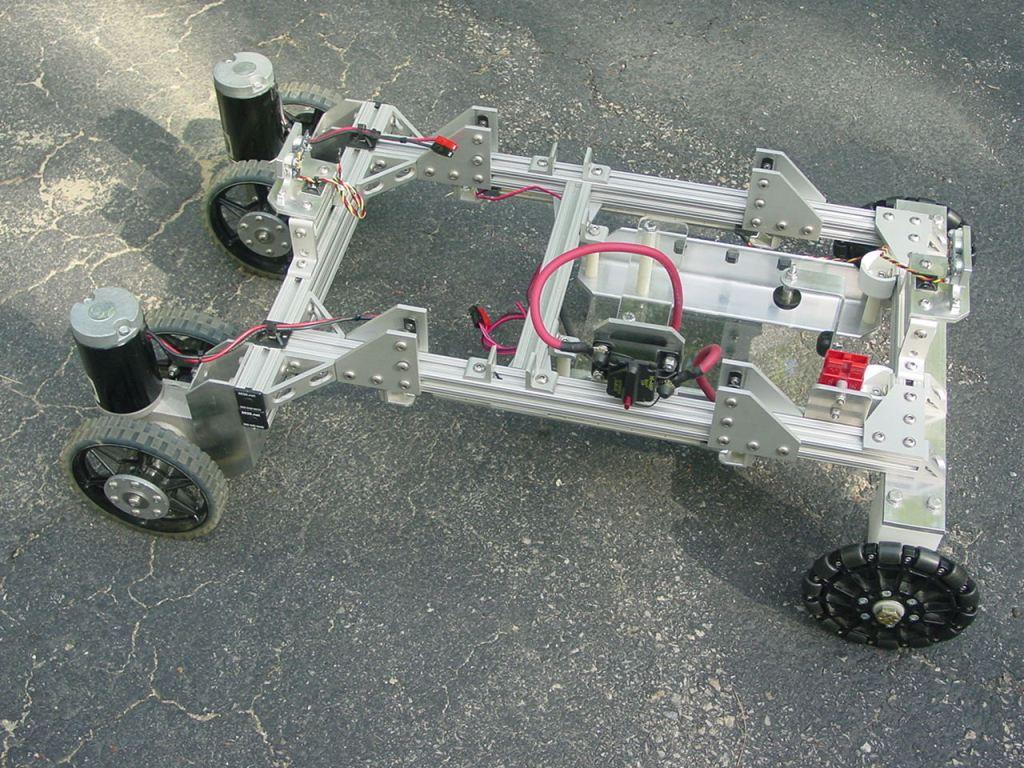
Here are some more detailed views of how I assembled the double motor drive servo, hope this helps.
This is a front view
This is the rear view
Tony
Awesome servos Tony! Everything is there, torque , control and low current. The only question now is will it fit into the designed space....
Dave, Thanks for sharing information on your build using the Bosch motors. I will be following your progress using the Kangaroo x2 setup, because I am using the Bosch motors in my next larger build. It appears they might work fine for your application. Do I understand you right, that you will use a motor driver and the Kangaroo x2 setup? Did you mention before, that you are already using a pot on another part of your robot being controlled by EZB? Tony has been helpful with his use and experience of the motors. EZ Robot community is great. Thanks, Steve S
@ Tony, Again as I've said many times, thank you! These motors seem like they are an answer to many problems. I really hope the end result will be what I'm looking for. There are so many positives in these motors; almost silent, strong, the built in pot and they are very small. The only negatives I can find at this time is they are just a touch slow for my taste even at 18v. I'm not a big fan of over volting DC motors past their rating but it's not like they're going to be used constantly. The only other thing I really don't like is the plastic gears. True, the worm gear is metal but all else is plastic. Again, this may not be a problem because plastic resins are very strong these days.
@Steve, I haven't yet started working with the Kangaroo, hopefully today. From what I've read it needs to work with an H-Bridge or Motor Driver of some kind. It's designed to work with a SaberTooth but I think any motor driver rated for the needed load and voltage will work. Also if you want position control you need a pot. It also has inputs for limit switches and will find them automatically when trained. If you have no limit switches you can also train it where your end of range of motion is and it will remember and not go past that point! This would be a great feature for robot arms or other parts where there is no room for limit switches. I could have used this up in my Radar section. I has a devil of a time fitting limit switches up there. Here's a link to a PDF on the Kangaroo: Kangaroo 2X
Also Steve, I am using several feedback pots throughout my B9 for positioning; Radar, Waist and Hip bend. In the scripts I have to use math to find the positions. They aren't too hard to to write once I found the proper equation. I only have to have it stated in one script and use other scripts to call it with the variable value stated where I need that script to stop rotation at. However if the Kangaroo X2 works like I hope, I can do away with that bulky script system and use ARC's native servo controls like the relative and multiple servos.