
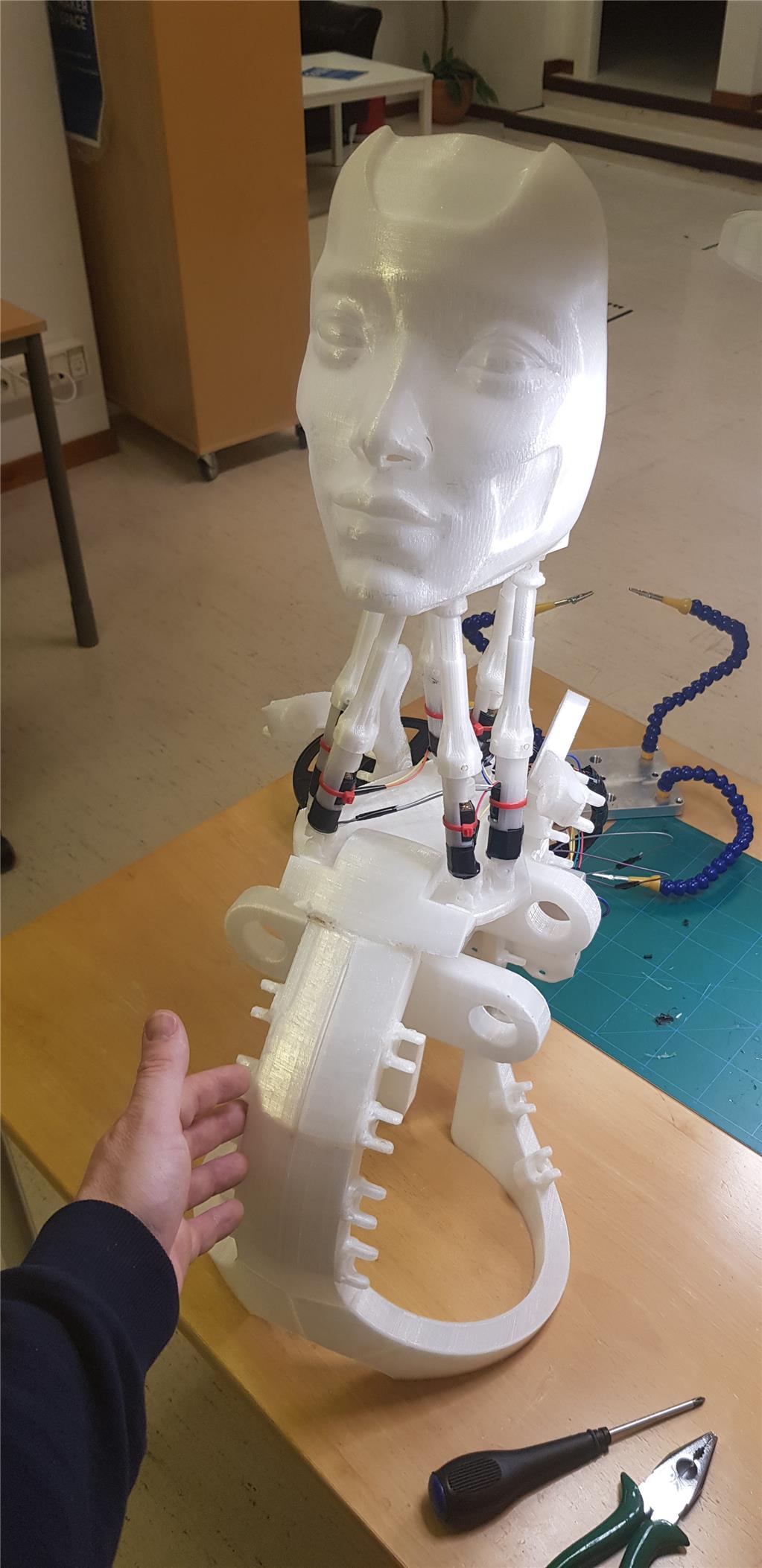
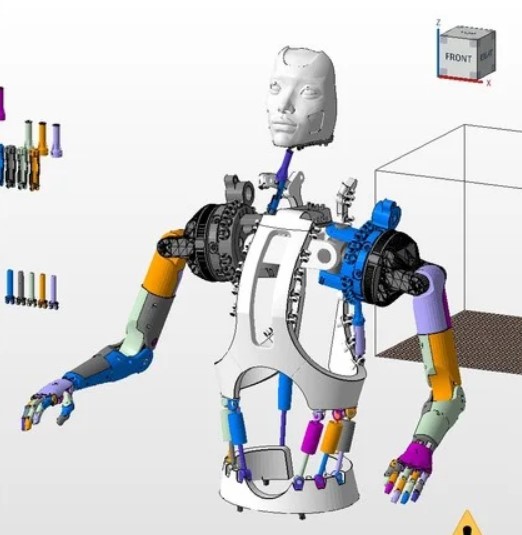
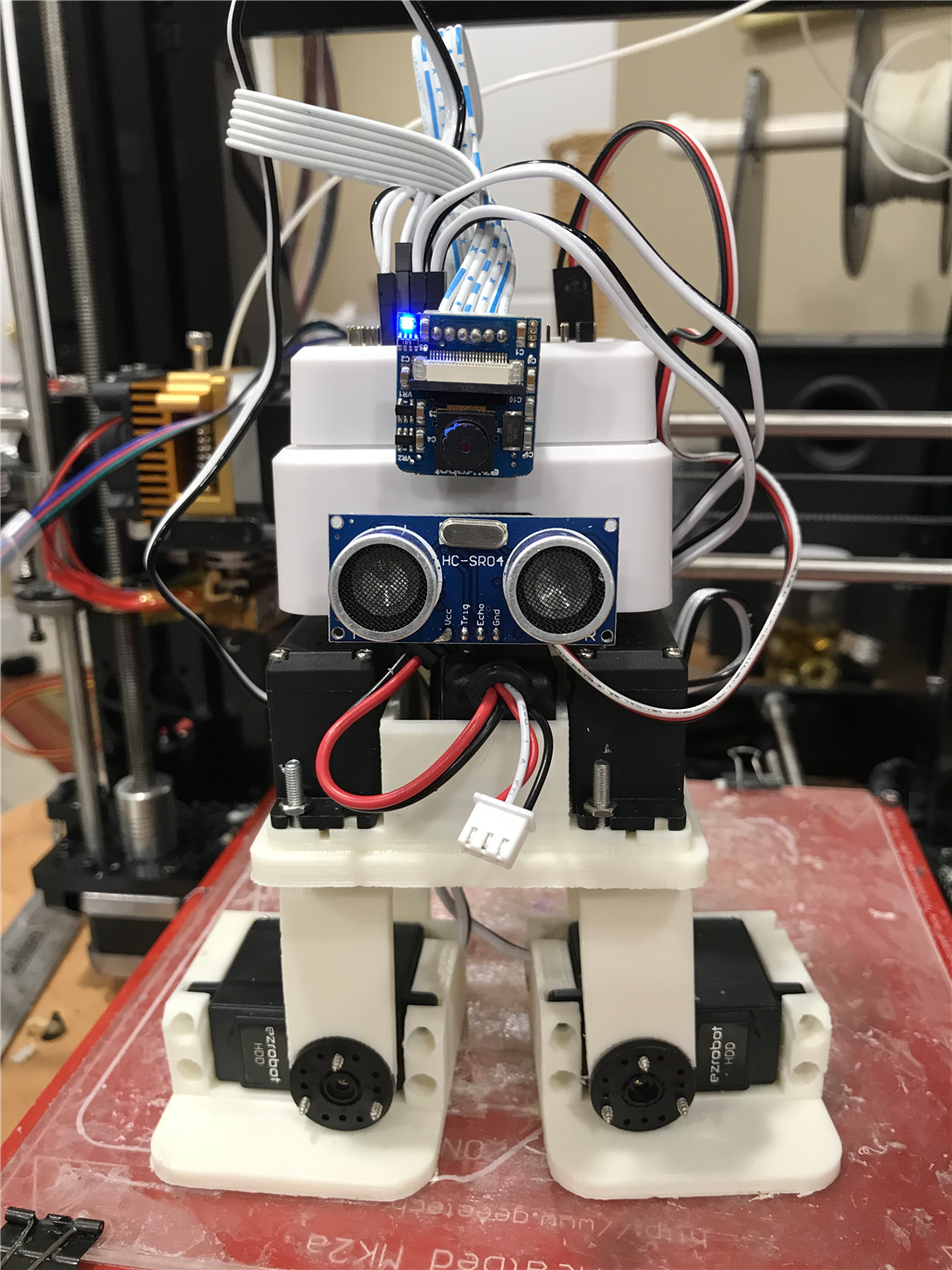
Hey Guys here is a quick update of my robot build. I have done a complete over haul of the body and arms. Its working out great Attached are some photos The face is a screen and the face animation will be projected using a mini dlp projector. And will be called up by an ez script that calls up vlc media player. So an Idle animation on a loop then video overlays of reactions when given commands. An ezb camera will also be attached to AVAs forehead for object recognition and all of that ezb goodness
Here is the code for controlling the actuators in the neck https://synthiam.com/Community/Apps/AVA-CONTROL-STARTING-PANEL-WORK-IN-PROGRESS-19141
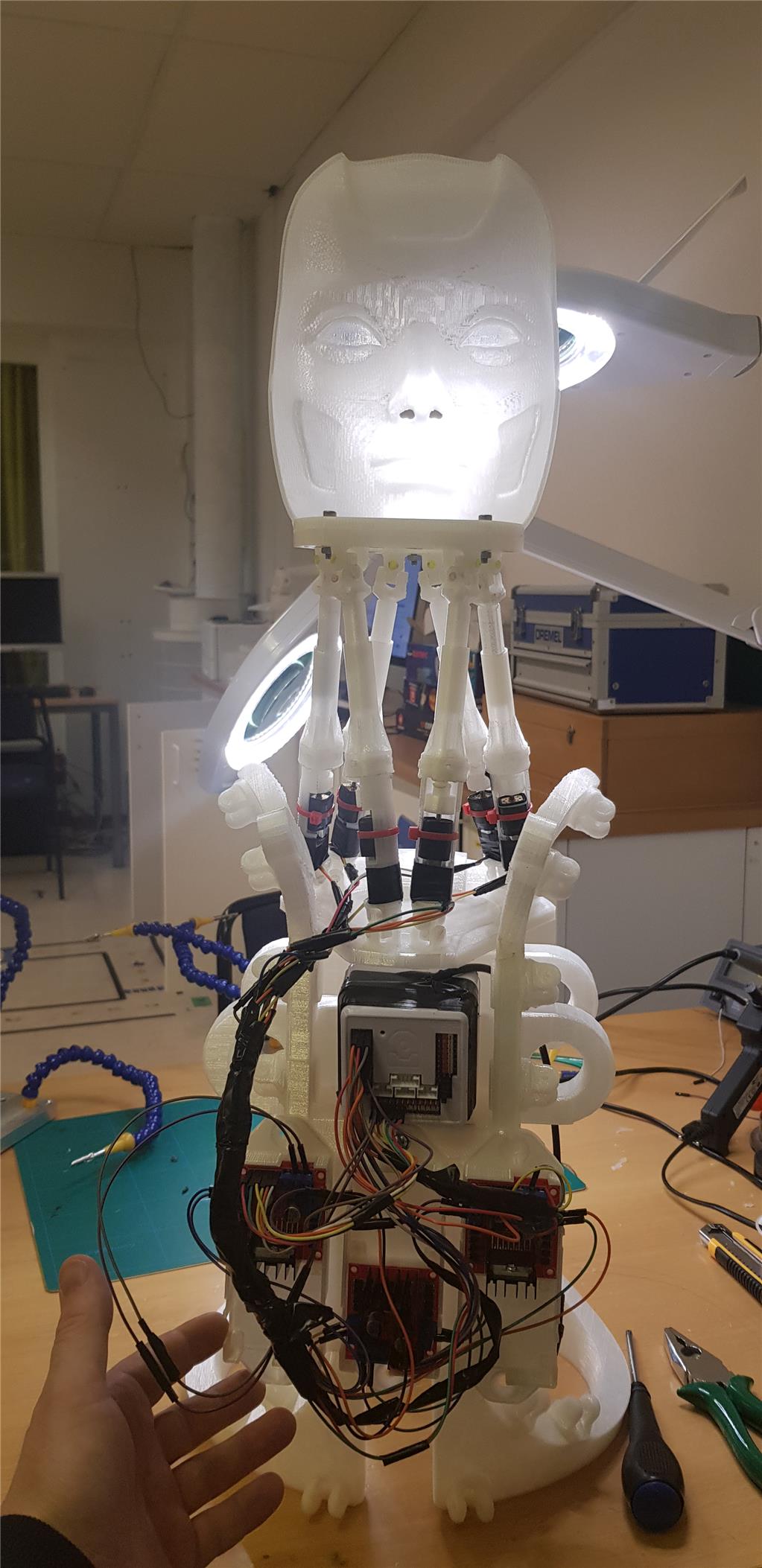
It uses H-bridges and standard dc motors with simple CW and CCW direction with the Movement Panel 1 for every 2 dc motors and then on top of that more scripts to do a specific movement then on top of that it does one script to put all of those movements together.
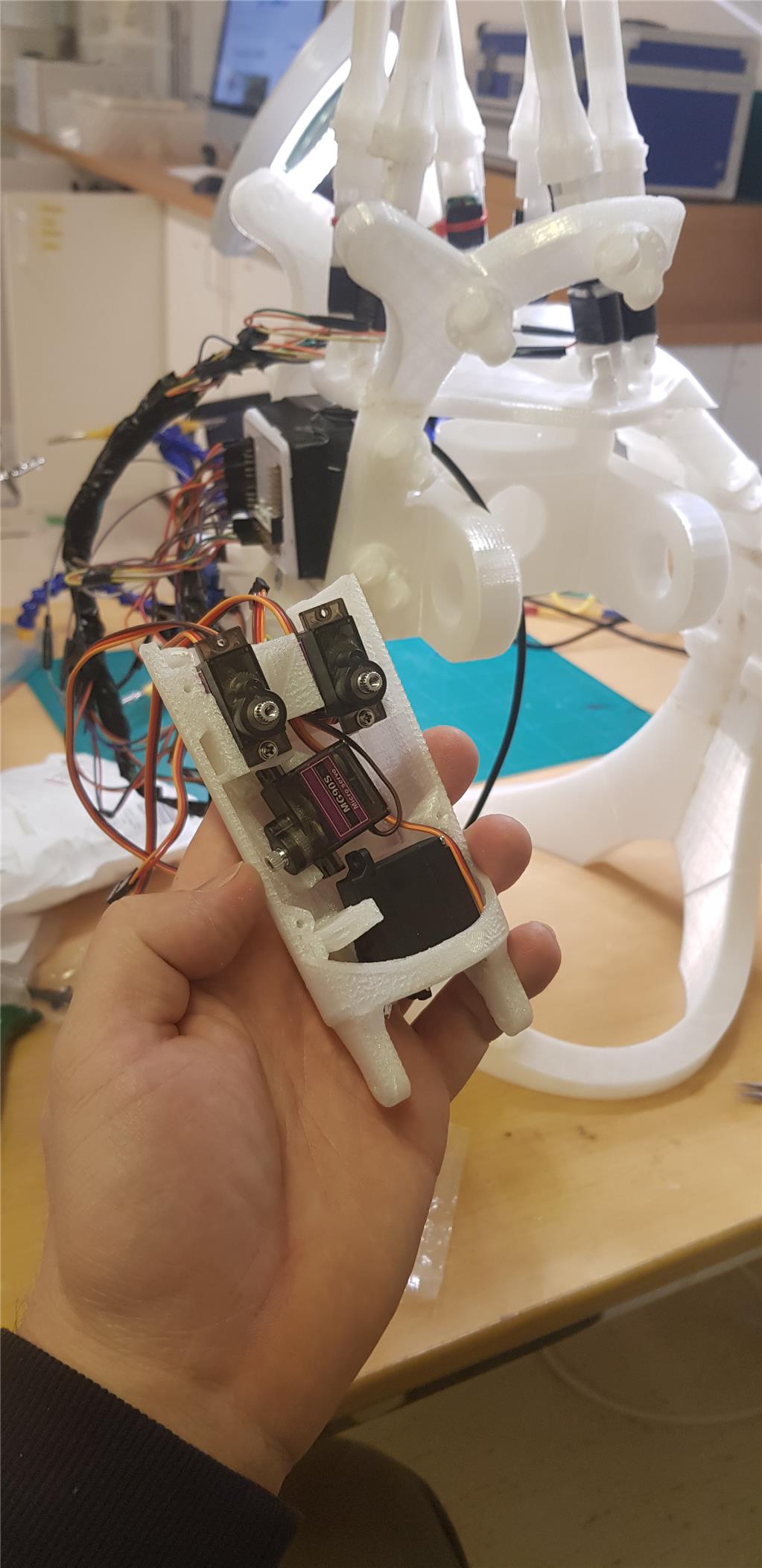
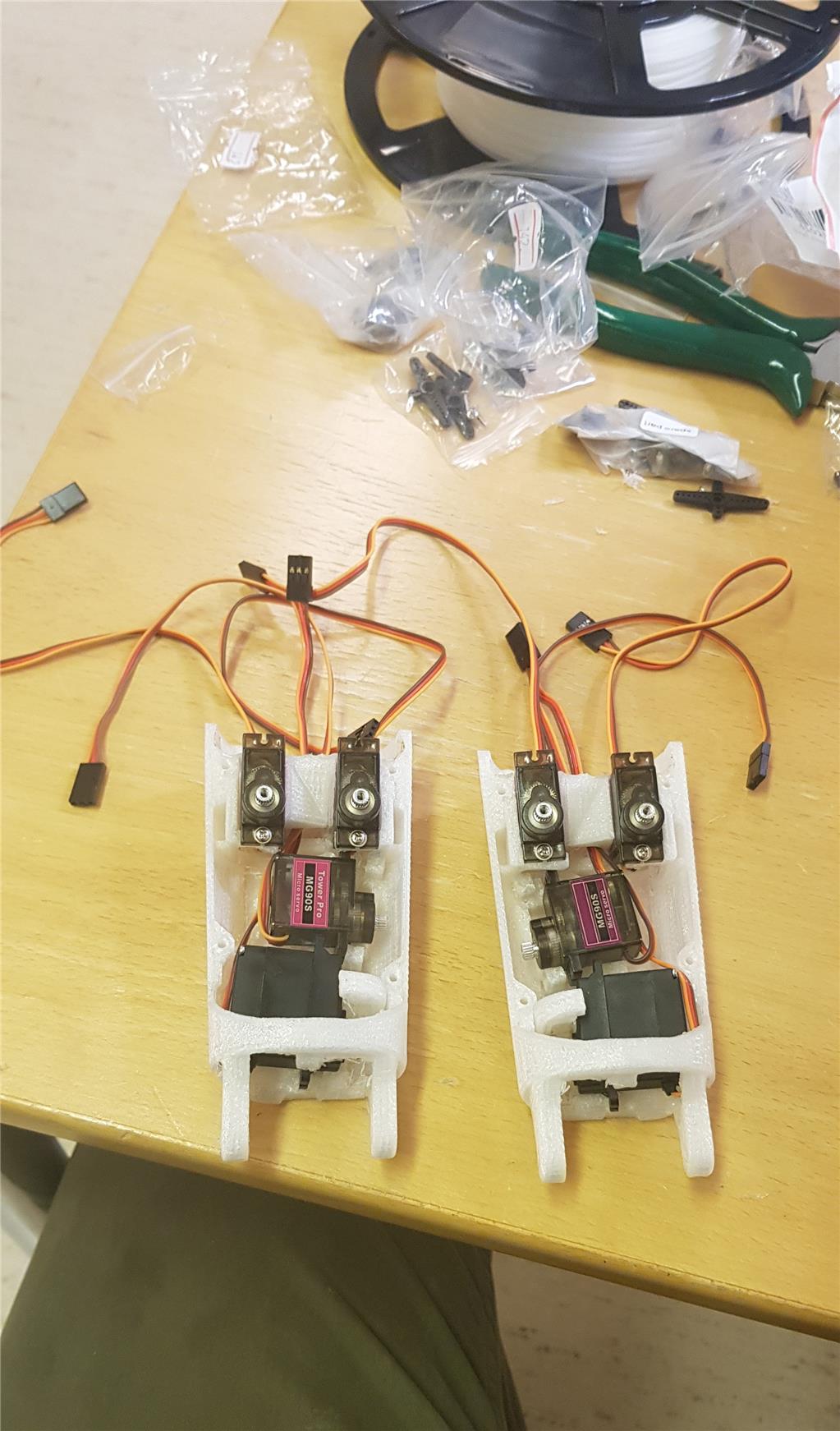
I have to add loads more on top like the video function e.t.c but this will come after I have rigged up the arms and chest for the arms I am using all metal gear servos and high torque metal gear servos for the forearm and up wards with a planetary gear dc motor for the shoulder rotations.
I will convert arduino unos into ezbs for the body pinouts and hook up a small windows 10 pc inside the body
https://www.thingiverse.com/thing:4166931
Discover more robots
Nink's Development Kit Robot

Rural's My Experiment 626


Really nice to see that you are making progress!! Looks very cool already!!
Thank you mickey Yes it feels great and last night i started the leg design its on my thingiverse page under designs.
The legs use this amazing slew motor that is 100 percent 3d printable. I would suggest all the robot builders here check it out because to buy these cost 6000 dollars and now we can 3d print them for practically nothing for our robots.
It changes robotics forever
Can you provide a link to your Thingiverse page...I would totally like to take a look!!
I'm very interested in the Parametric slew drive for elbow joints. You'd have to shrink it down and then i don't know how that would affect the torque.
https://www.thingiverse.com/3d_printing_doctor/designs
And here is the original drive:
https://www.thingiverse.com/thing:2792144
Nice...are they using softair bullets? Was not Skyentific also building a robot arm like this too?
https://www.youtube.com/watch?v=f6luI7hJuj4
Yeah he has been working on that arm and testing out different configurations. I like this design because it holds up weight without reversing the load.
That design on Thingiverse also looks nice, because of the stepper motor...I guess that might be a good thing for precision!
Those drives seem to be the way to go, for bigger robot applications!!