





























































































-635353562186322812.png)




















































































































































Hi all,
I'd like to share a video I just took of my full size Lost in Space B9 robot that's controlled by two EZ-B controller boards. Right now they are controlling limited movement and voice response of a few motors, lights and sound files played from a Sparkfun MP3 Trigger board. Although I'm just starting with the animation and have more building on the actual robot the result (mostly thanks to the EZ Robot controller board) is shocking. Please have a look at this (4 minute) You Tube vid and enjoy.
Please excuse some Technical camera lighting and sound issues. This is the first time I'd made and posted a vid online.
EDIT 8/2/13: Just realized I have no good pictures of how my B9 will look when complete. Here's one of the actual TV robots from the 60's TZ show Lost in Space and one recent shot of where I'm at with my build over 1 1/2 year after I started. Enjoy:



Thanks, Dave Schulpius
Discover more robots
Djandco's Djandco's Wall.E
Deleted's Erne - Emotive Robot


I can't see the vid from this computer but I thought I'd ask. Is there any place to reduce the weight and reduce the load?
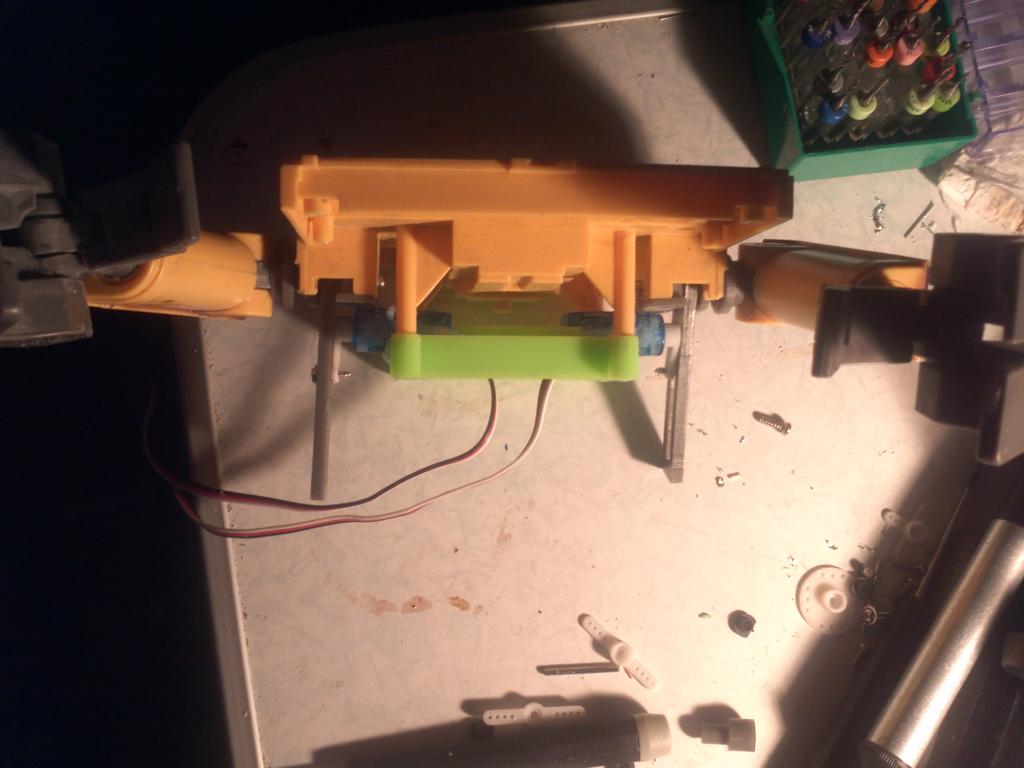
No Troy, I don't even have the arm built yet. The vid just shows the motor mounted to a board with a light angle attached to a hub. Then off the end of the angle I have one of my B9 claws hanging. When complete the joint motor will have to left the arm "bone" another wrist "pan & tilt" wrist joint and the rubber outer skin of the arm. I would like to have two joints like this, an elbow and a wrist.
Glen, I'll have a closer look at any way I can add springs.
Dave, without a doubt you are going to need 2 Bosch motors in parallel for this joint running at 18 to 24v, give this a try I think it will work.
My EZ:1 arm has 2 Bosch motors at the shoulder running at 18v and the 60cm (23 inches) long arm can happily lift a drinks can in its claw.
I originally had trouble with shoulder lifting torque at 12v and that is why I went up to 18v which then worked great for me.
For quicker testing take the EZ-B out of the loop and just take the (parallel) motor wires straight to the 24v source, swapping polarity to change direction.
Hope this helps.
Hi Tony, yes it helps to know that you had some trouble also. I'm planning to double up these motors today to test their limits. I figure the shoulder joint will have to lift at least 5 lbs (about 2.2 kilograms) or more and 3/4th that of that weight at the wrist.
I had this setup attached to EZB because if it had been able to lift the load I would have ran another endurance test. I wanted ARC to continually lift and lower the load for several hours it see if the motor would take the abuse. Didn't get past the first lift. tired
I'm almost ready to just use the same servo I'm using for my bubble lifter. It's a Seiko PS-050 and a very quick and strong monster servo. I think it would snap your finger without a problem.
Seiko PS-050
However they're very pricey. They cost about 250.00 USD each. I'm having sticker shock over this one because after doing the math it's about 1000 USD's per arm just for the servos! Maybe a trade off would be to use these servo's at the first shoulder joint and something less expensive at the wrist (like your motors you sent me doubled up if they pass today's test).
I'm still looking throughout the internet looking for a small, strong and quick DC motor or servo that would handle this weight. I'm willing to double them up to give me enough power if I have the room. I need to keep the foot print of the assembled joints about 4" (101.6 mm) round. The motor setup you (Tony) sent me would have been 3.5" (88.9 mm) doubled up.
Dave, you will have to feed the Bosh motors higher than 12v for your tests, good luck hope it works out!
Tony
#For Dave . Its amazing what man will do to hoist a full can of Moosehead( Canadian beer eh )
. Its amazing what man will do to hoist a full can of Moosehead( Canadian beer eh )

$perseverance = infinite $focus = moreinfinite $frustration = (infinite - 1)
If ($perseverance + $focus > $frustration) sit back and enjoy your favorite drink sleep(10 hours) Else ( Chop knotted fir stumps) sleep(no sleep) Endif
Tony, I'll bump it up to 24v and see what happens. 12v isn't doing it as you can see in the vid where I've added a second motor.
Edit: I just noticed in my vid that I only have the PWM set to 55% witch means I'm only getting about 6v to the motors. I'll see what 24v gets me.
Glen, Love your coding!
Wha Hooo! Success! I bumped the voltage up to 24vdc and the arm just flew up. Wow, it really surprised me it moved so fast. It was such an unreal and inhuman speed that I had to move the PWM down to 50% to bring it to a more natural speed. The motors didn't even seem to strain.
Granted I'm only lifting 1.5 lbs here and I think I'll be lifting as much as 8 lbs when all is finished. Tomorrow I'll add more weight to see how it handles that. Then I'll remove the second motor to see how it handles that.
I'll take vids and post.
Thanks Tony for pointing this out!