Robot Building Questions

Synthiam Credit

Earn Credit
Contribute to the community and earn credit to lower the cost of Synthiam robotics products and subscriptions.


Recent Robot Skills

Inverse Kinematic Ar…
Control robot arms with inverse and forward kinematics, converting X/Y/Z positions into joint motion...

PCA9685 Servo Driver
Convert an EZB I2C bus into a 16-channel PCA9685 servo controller, exposing V0..V15 with...

Rplidar
Slamtec 360° LiDAR driver: calibrated, offset/rotation-adjusted scans published to ARC NMS for...
Featured
Efficient ARC Variable Watcher - lower CPU for large projects; slow initial array render but faster updates; shows name, type, value, length

Featured
Build a giant FT-6 3D printer: 720×350×400mm print area, 50µm resolution, dual-color bowden, heated bed, Marlin controller, Wi‑Fi touch screen.
question
It's Time To Think About Robotic Christmas Gifts
It's time to think about robotic Christmas gifts. here is a link: https://robohub.org/its-time-to-think-about-robotic-christmas-gifts/ j
Nomad 6R |
question
What Kit Do I Need To Build Wall-E?
All of the links to the kit from this post https://synthiam.com/Community/Questions/308 just go to the main store https://synthiam.com/Shop/ I don't know what kit I need to build him.
CardboardHacke… |
question
Ez-B V3 Pooched?
After realizing that wall-e was being neglected I decided to pull him out. I realized that I had an alternative battery so I unscrewed the battery pack from the adapter and screwed in the new pack. I plugged it in and... It didn't turn on... I played with the wiring. Nothing... I switched back to the original pack. Still nothing. I thought it might...
CardboardHacke… |
question
Hi Guys Havent Been Here In A Long ,Thiers Been A Change On Random Joke
is it posiable that the random joke web site is gone i pulled my robot Genie ask to tell a joke wounldnt do any thing getting . i check the web site looks like it for sale lol cory any idears eek
csa459 |
question
Ar Parrot Drone 2.0 - Follow Me Mode
Hi everbody! I'm a german student, trying to build an ar parrot drone, which can follow me automatically. I found out, that you offer the Software ARC, which helps me to track a special coulour or a face with my ArDrone camera. I read that it is only designed for the 1.0 -version. Is there also the possibility to use it for the 2.0 ArDrone version?...
CardboardHacke… |
question
Introduce Myself And My Idea
hi all.my name is patrick and am a huge fan off robots. i am not a programmer do i did make 3 sucsesfull bioloids. my i dea was if its possible to use the robi robot from deagostini whit ez. i see DJ does this whit robosapien v1 too. BTW dj ARC is best i ever seen. has anyone has an idea how to start. thank you
Nomad 6R |
question
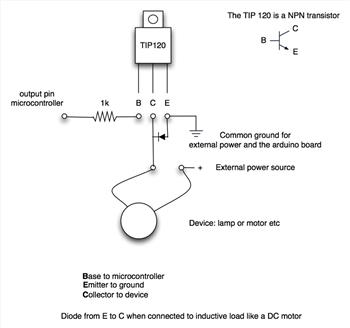
Tip120 & Tip122 Transistor Switching Circuit
I just decided to redo one of my TIP122 Transistor Switching Circuits (mainly because I needed a break from working - there is...
Rich |
question
Vision Question
Hello All ! Just joined the forum and thought maybe you could help me. I'm building a remote control lawnmower to cut some steep banks that I have in the yard. I bought a used power wheelchair and a RC controller and all is working well. I now just have to add the mower deck to it. After running this thing around the yard it occurred to me that I...
Dave Schulpius |
question

Power Wheelchair Joystick Interface To Ez-B
Hi all! I'm new here I've been lurking for some time as I assembled equipment. My plan is inspired by DJ's snow shovel bot and...
Dave Schulpius |
question
Best Place For Robotic 3D Printers
We have the collections of cheap and best 3d printer from top 3d printing companies worldwide. In our store you can compare and choose right 3d printer which suits your requirements and specifications. You can find all kinds of desktop and home 3d printer for all budgets at our store. Visit our store for more information...
Rich |
question
Switching Between Ez-B And Radio Control
Has anyone looked at this for switching between radio control and ez-b for robot control. I found something at pololu....
EEGbiofeedback |
question
Kinect Support On V4
Hey everyone I was just wondering has anyone heard if V4 will support kinect or encoders?
EEGbiofeedback |