










































Hi everyone.
This is the first of two posts talking about the inspiration and features of my home robotics build. In the first post I talk about the inspiration behind the build of K-9 2.0. The second post explains the features and build details.
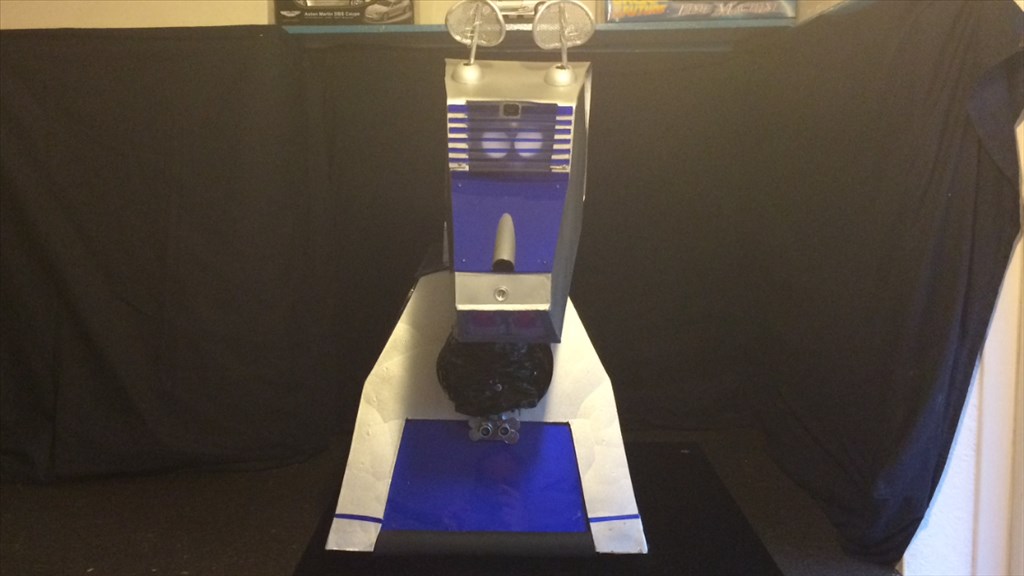
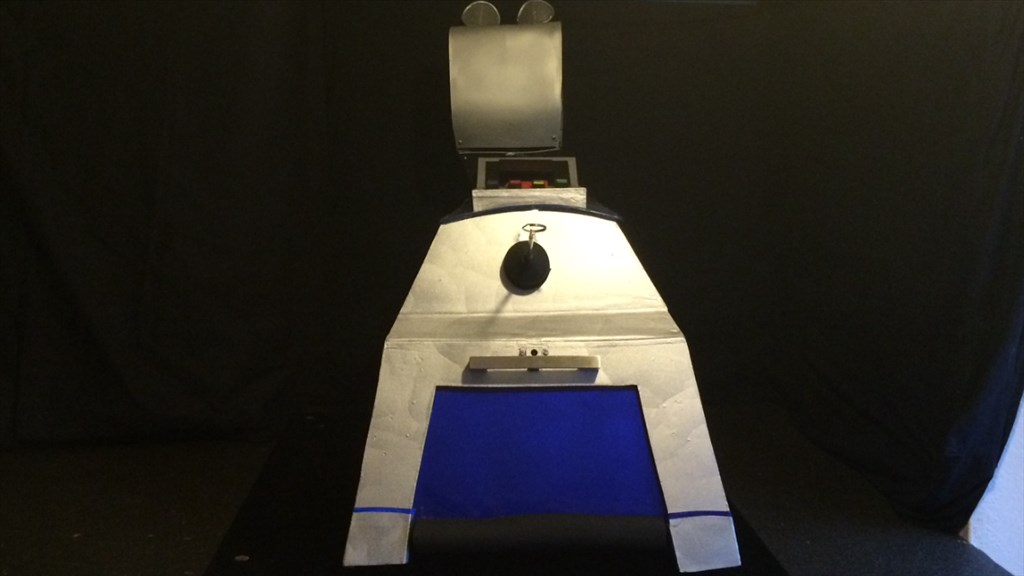
So, after a year in the making, I am pleased to present a project I've been wanting to do for years, pretty much since the first time I saw the little fella in Doctor Who when Tom Baker (one of my favourites) was playing The Doctor. K-9 was pretty much my all time favourite characters in the show and with that in mind, and with my love of dogs and my love for robots, it was logical that building my own K-9 unit some day was in the stars.
Some of you have already had a brief viewing of him when he gave a Birthday message to the EZ-Robot team, and Donned a moustache for Movember, but now his build is pretty much complete its time to bring him to the showcase. I have included a "How he was made" video at the end of the post.
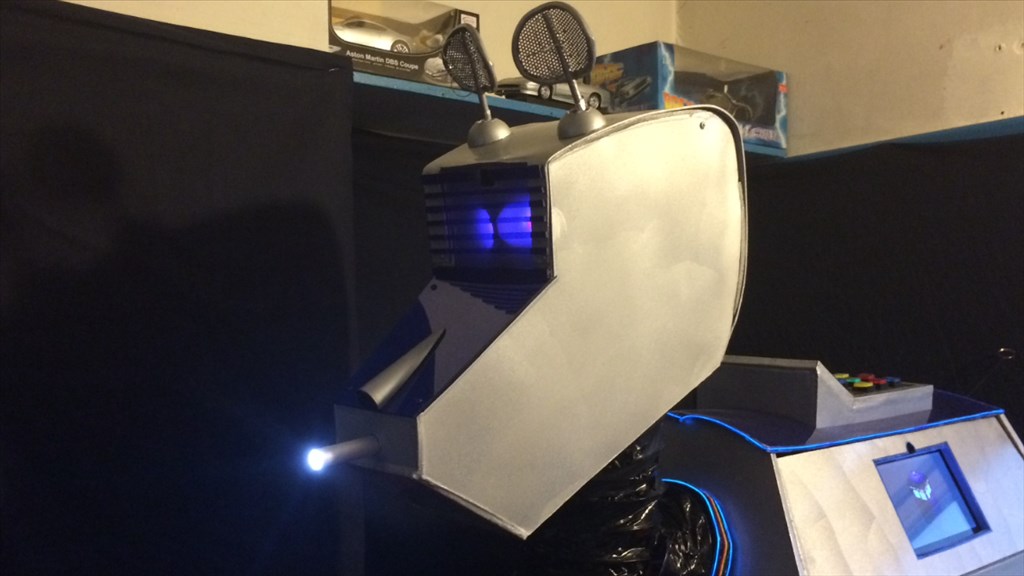
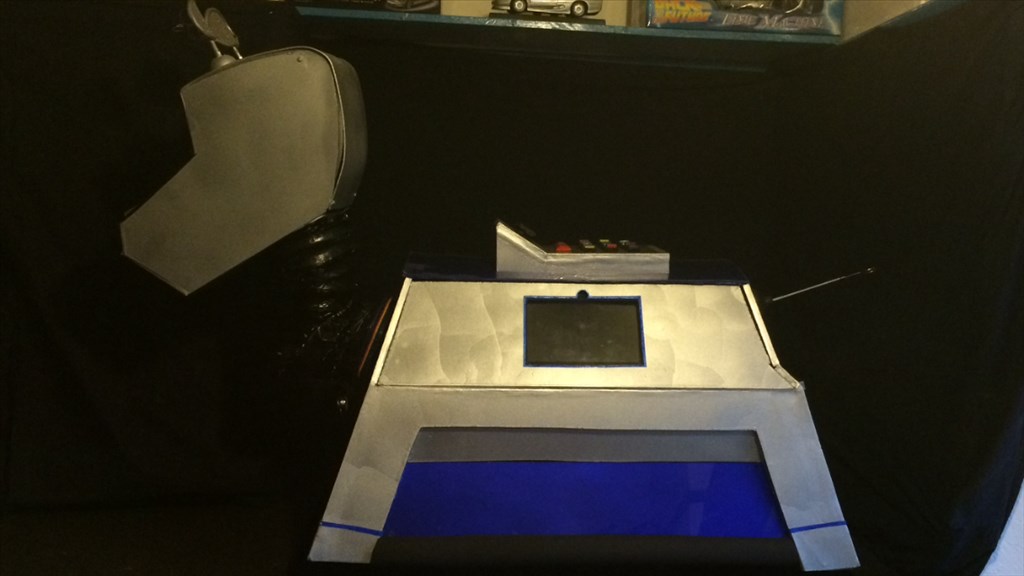
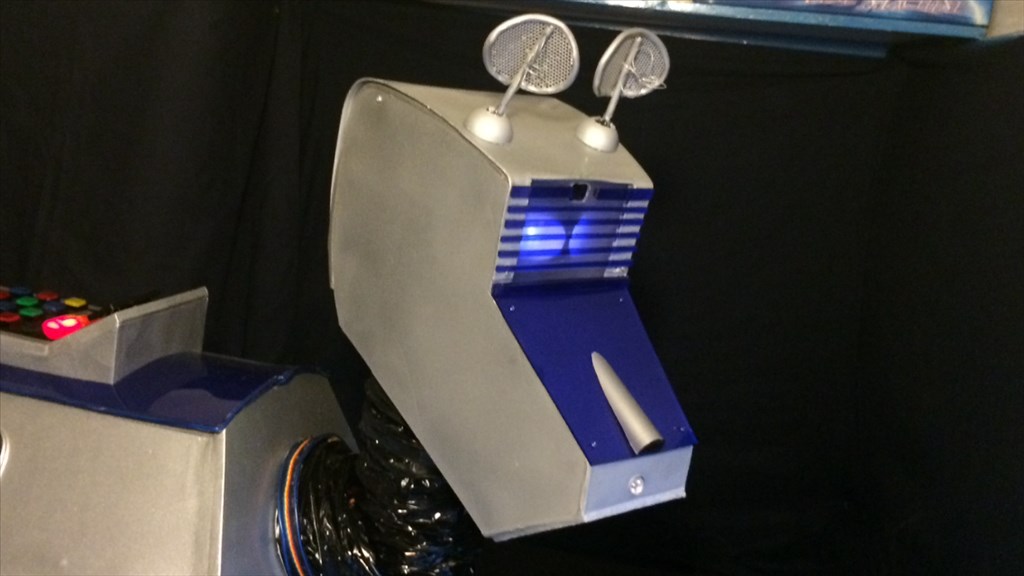
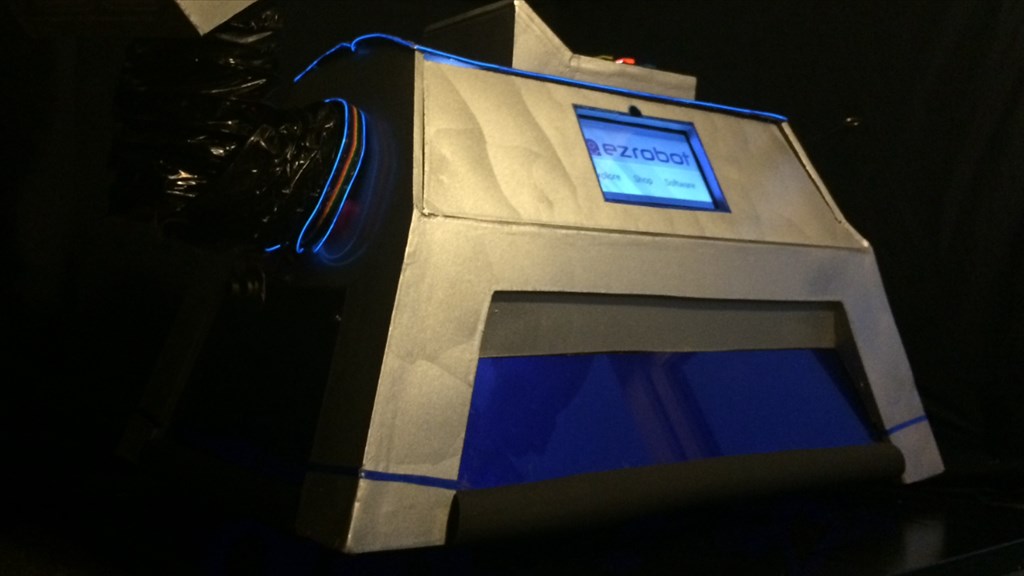
So, why K-9 2.0? K-9, because it's a cool name and the clever play on words. I just couldn't change that, and I couldn't call him FiDo (whovians will know what I mean by that). 2.0, well those of you in the know have already noticed my K-9 looks a little different to the one's seen in the show. This is because I wanted to give him a newer, slightly more modern look but still keep the original shape I fell in love with as a child (don't like the new one in the new kids show. Looks too much like a toy to me). I also wanted to have a more personalised look and shy away from building a replica, although I very nearly did. (I hope I haven't offended any K-9 aficionados out there with his new look).
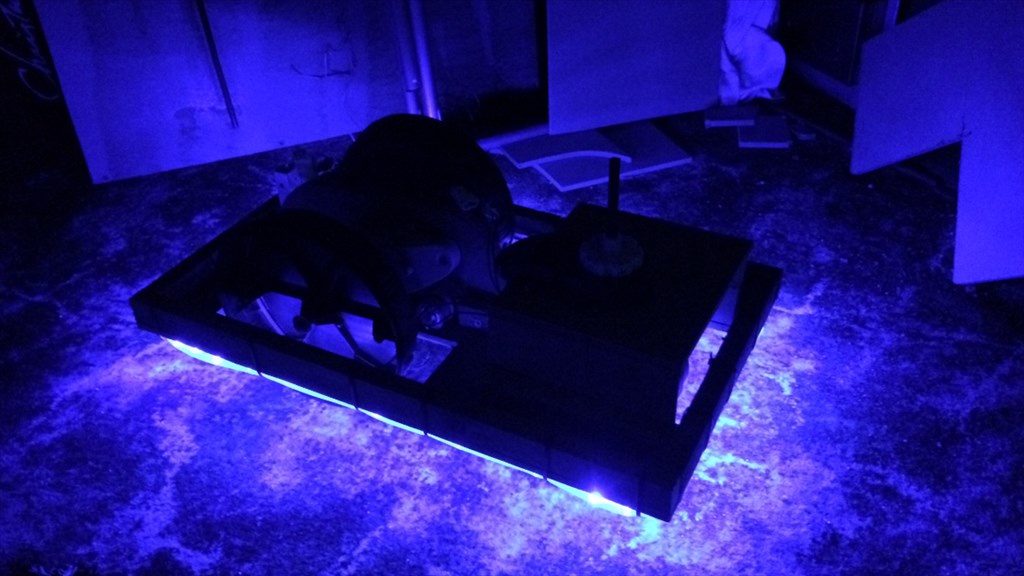
Okay, why now? I had an accident a while ago now resulting in injuring my back and left leg which left me unable to work or do much else for a while. So, looking for something to do to keep my mind and hands busy, and not become a couch potato, I thought "I want to build something". So needing to keep costs as low as possible, I got together a load of material I had from around the home, old R/C tanks, Cardboard, MDF sheets, LED fairy lights, old web cams, and numerous other bits and peace's laying around my home just crying out to be used. First of the blocks was a robot which didn't turn out very well. To heavy for the R/C tank drivetrain.

Then came cardboard Dalek BOB (Built Out of Boredom). He was a lot more successful, and was a lot of fun to build.

During BOB's build my mind started going in to overdrive, and that where the K-9 build came in. So after BOB was finished I drew up some plans and made a Cardboard K-9 prototype.

Again, he was was a lot of fun to build but I wanted bigger and better. At this point I had a lot more mobility so I decided, let's just do it.
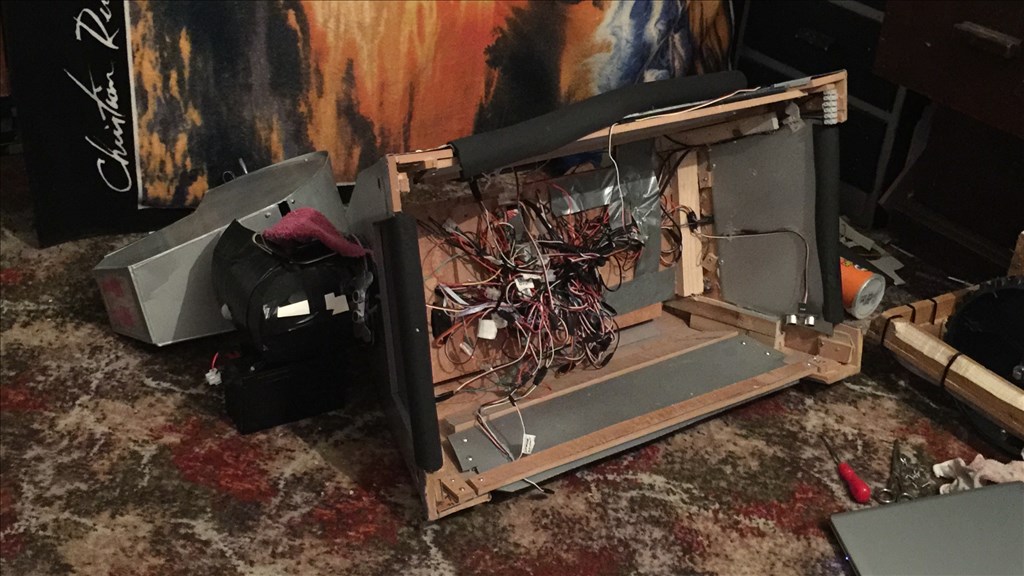
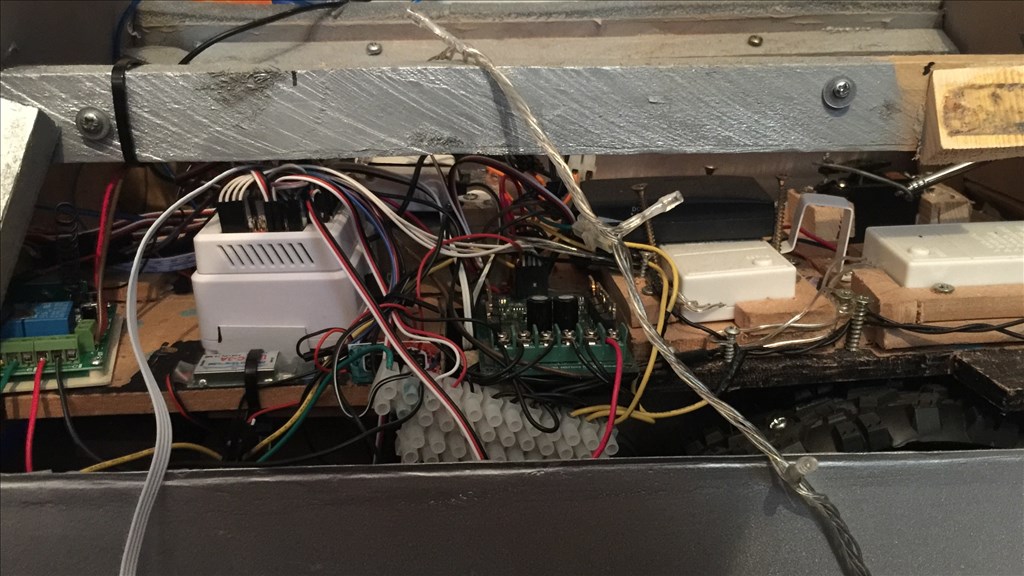
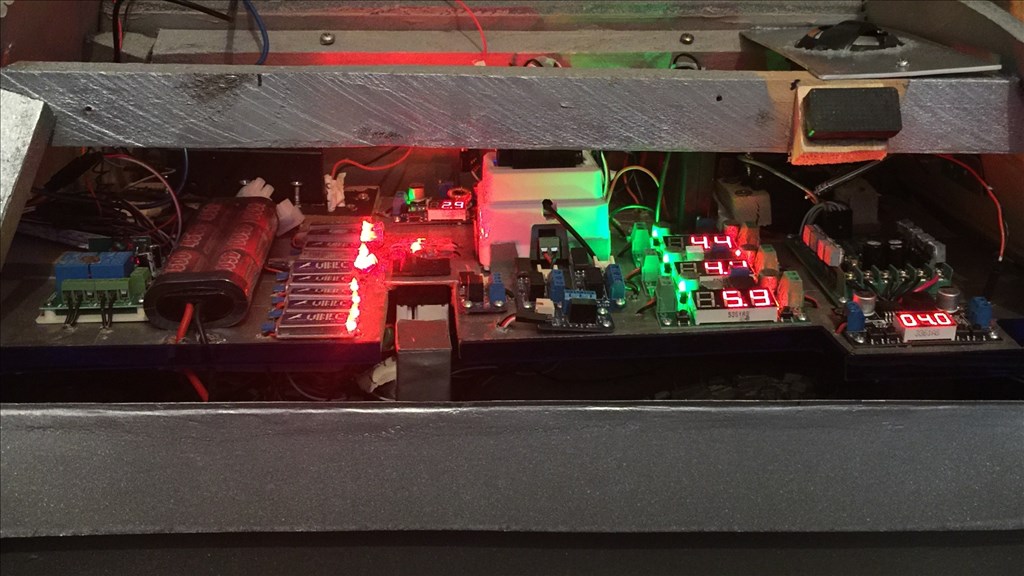
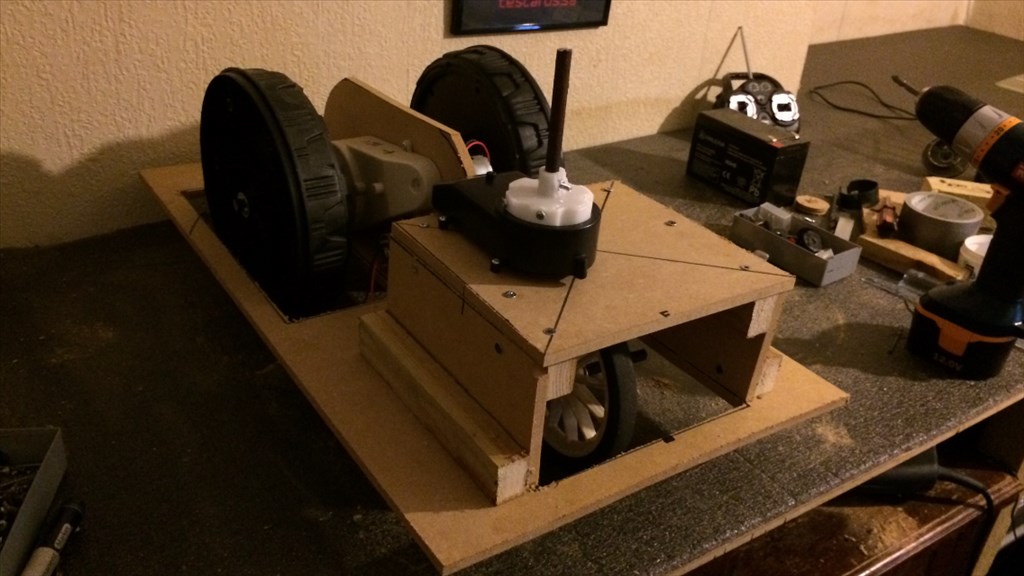
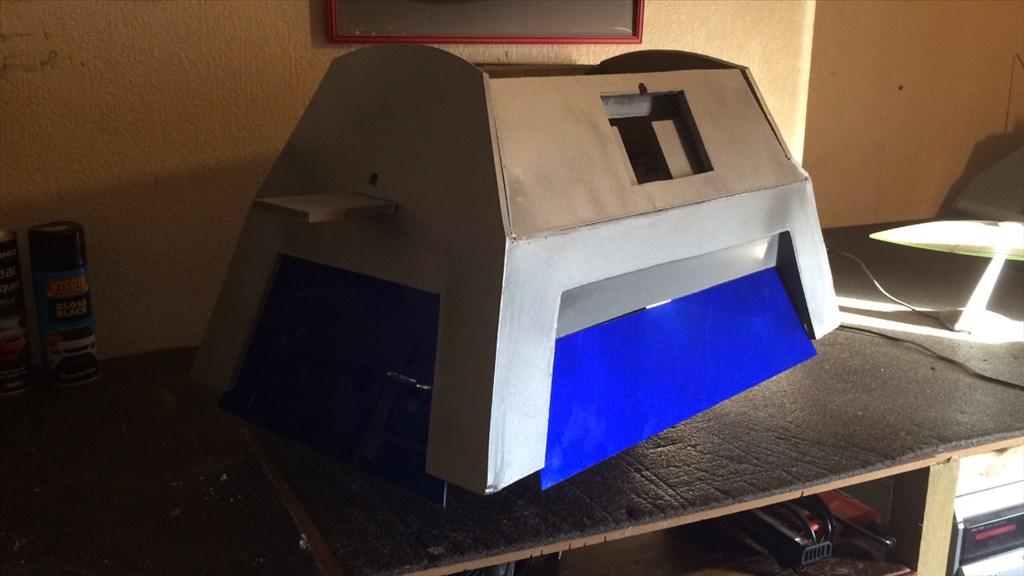
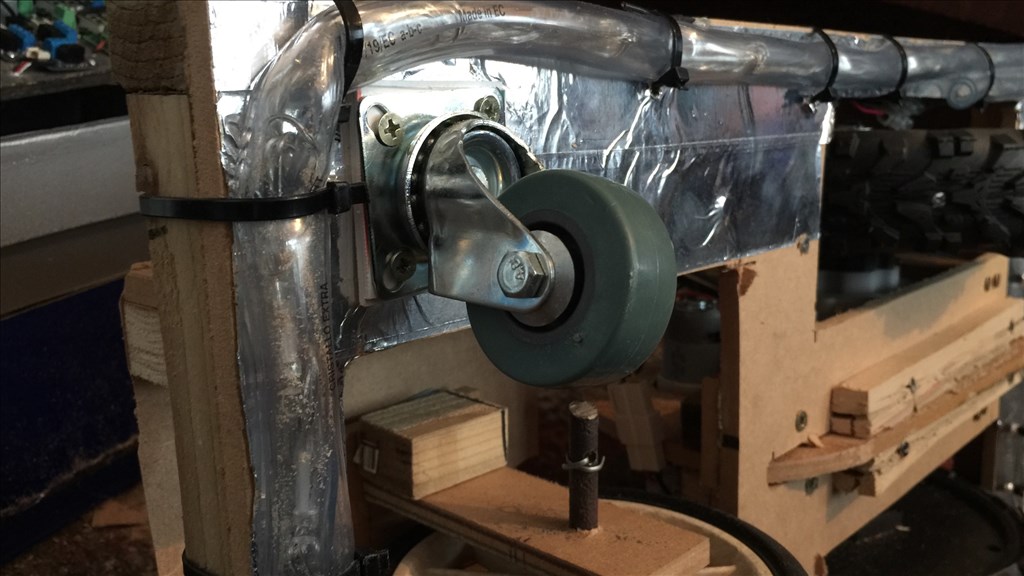
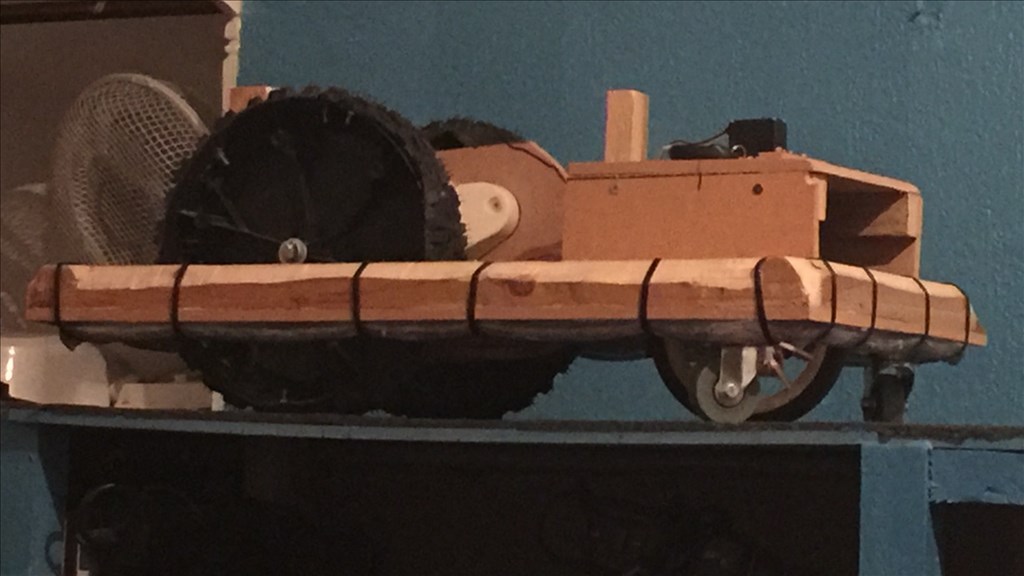
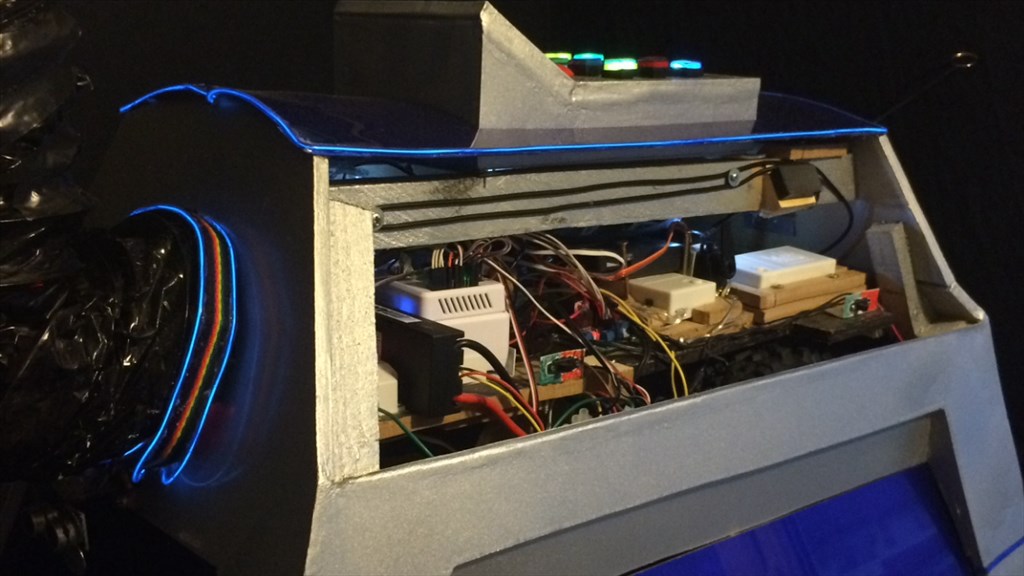
My (not so) little robotic pooch nearly turned out very different, and I'm not talking about how he looks. After making the R/C bots I had three strong motors and one last working R/C control and receiver. So I drew up some blueprints, I got my tools together and dusted of the MDF sheets. I was going to make a full size similar dimension R/C K-9 and hack some PIR sensors and audio equipment to install inside of him. I started on the chassis first (as seen in the "making of" video below) just working a couple of hours a day or night, and a few weeks later pretty much had it complete and started to make the body frame. During a not very good day as my back gave out again, I was searching the interweb when I came across a fun, crazy, interesting company's website. I think it was called "EZ-Robot" but I can't be sure(s) (pardon the pun DJ). This changed everything. Microcontroller, servos, face/colour/object recognition and so much more, this was for me, or rather K-9. After spending days going through the website and forum I made a shopping list and placed my order. Due to the pre-order status for orders at the time, this gave me time to crack on with the build and hopefully get most of it done. About 3 weeks after I finished the main part of the build I got that all important email, "Your order has been dispatched".
My goodies arrived a few days later and it was "game on". I started playing around with ARC and my new EZ-B v4 and was well impressed. This lead to a few small changes in K-9's design, but for the better as it turned out. It was about this time I became more active in the forum asking questions I got really stuck with and was amazed with the community members response times and willingness to help. If it wasn't for you guys, K-9 wouldn't be half the robot he is now, so thank you all who took the time to respond and help. No joke, this is the only forum I look at on a daily basis and that I am active in.
Well as I mentioned, the build is pretty much complete now, and everything installed and working. I still have a couple of ideas I would like to implement at some point like adding microphones to his ears, adding a smoke detector in his eye panel and a couple of other things. But for now I'm going to concentrate on ARC and set a lot more things up. I've done a fair bit such as setting up servo positions, sound files, face and speech recognition, but there's much more to explore and still have a couple of teething problems I need to iron out.
The video below is the first of a few to come. It is a slideshow of some of the photos and video clips I took during the build and testing. As I said earlier, I still need to sort out a couple of issues I'm having, and once that's done and everything is hunky-dory, I will put up at least a couple more videos of K-9 in action for you guys.

In post #2, I have put down a few more details of K-9's features, abilities and build design along with a few things I am planning to do if possible. So, as some of you already know, this is my very first attempt at building a microprocessor controlled robot, with no scripting/coding knowledge or "qualified" woodwork/electrical experience but, even if I do say so myself, I don't think he turned out too badly. But it's not what I think that matters (well perhaps a little bit), it's what you guys think. Well I hope you enjoyed this insight to how K-9 2.0 came to be (and if you kept reading this far, then fair play to you), and I hope you enjoy the video. I would love to hear your thoughts and opinions, things you may have done differently, things you do like and things you don't. I'm pleased with the way he turned out and I hope you like him too.
Again, thanks to all of you that helped me along the way, and for those who are just browsing or are new here, I hope K-9 2.0 inspires you in some way with your own robot builds.
Steve G.
Discover more robots

Ezang's Let's Have Some JD Robot With Voice Commands
DJ's Jd's Friday The 13Th


UPDATE 2.0/2 ===========
Here's another update explaining what's new with K-9, and I'm pleased to say this update contains a couple of videos for your viewing pleasure.
Steering
I have added a small script to K-9's steering servo so now when he turns left or right, his head turns in the same direction. This reduces any over-swing when turning and he can also see where he is turning in to now. And it looks good too.
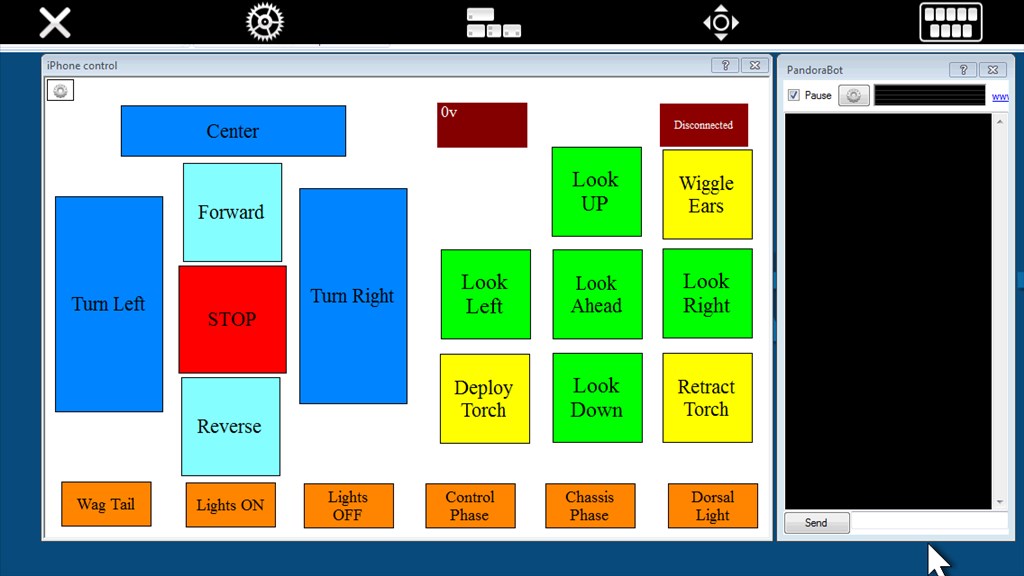
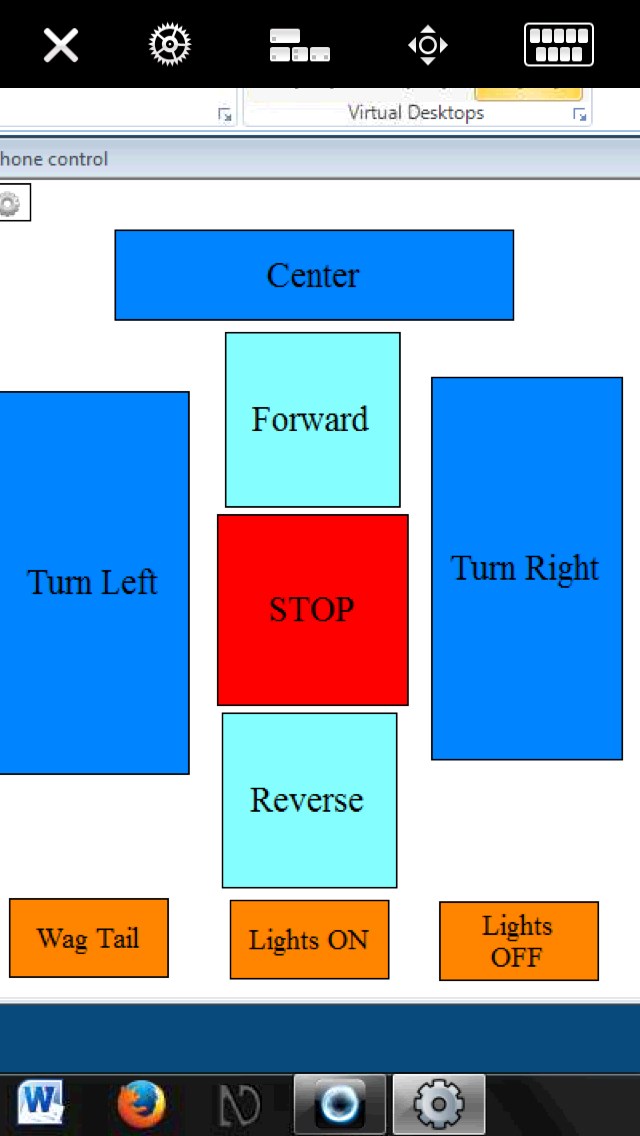
iPhone Control Update.
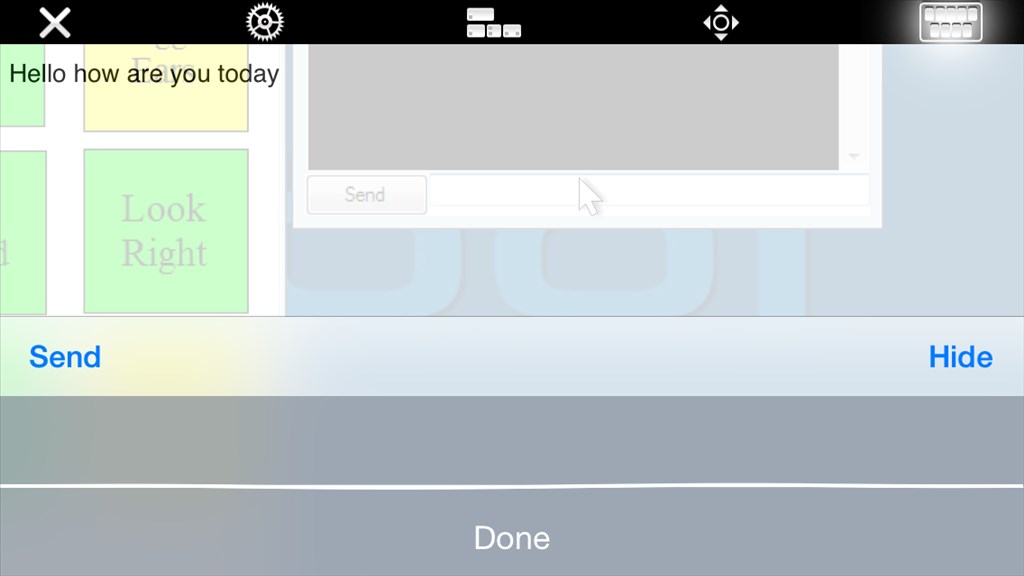
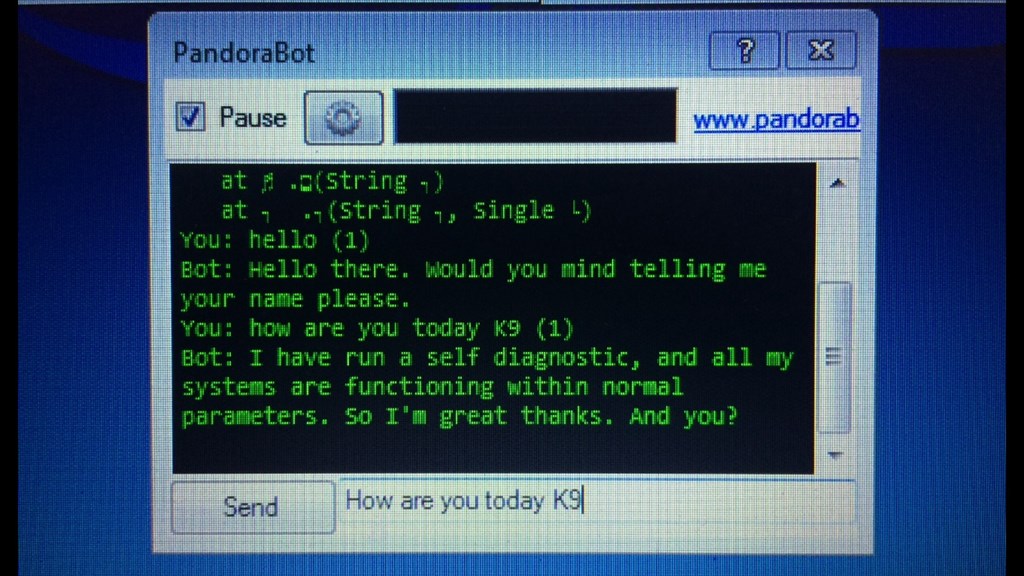
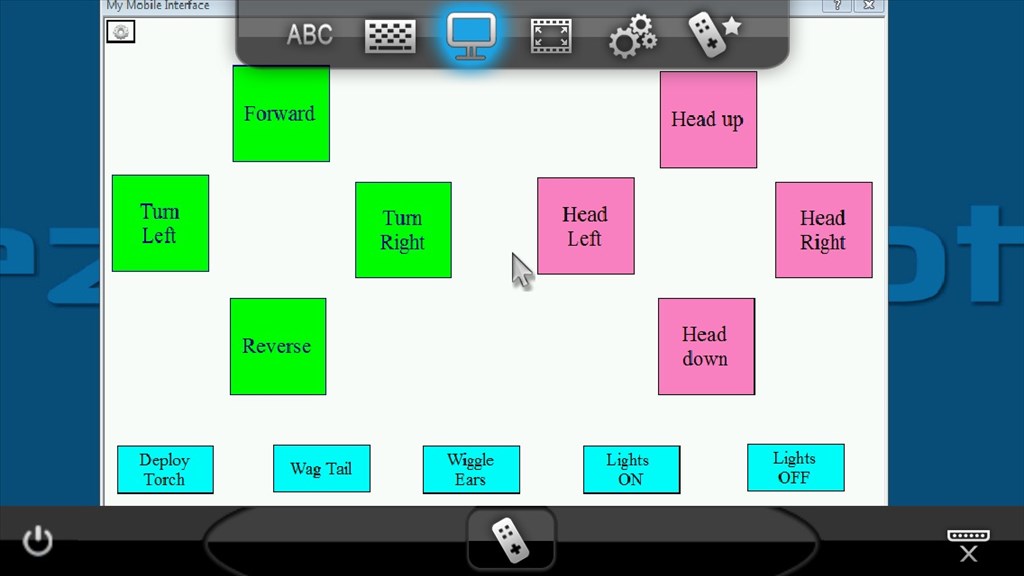
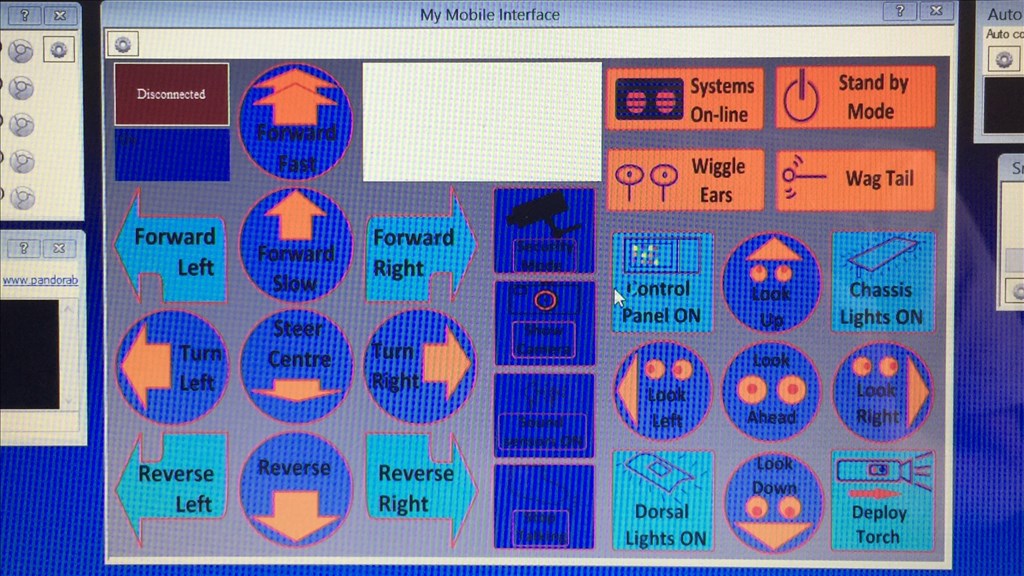
In the last update I mentioned that I was using two VCN remote PC apps, at least until the ARC iOS app is released, to control K-9 but one app didn't have a screen mirror function, and the other didn't have voice recognition. Well I came across another iOS app called iTeleport which, although a bit expensive for an app (19 GBP), it combines the features of both apps. Now I have an ARC window with a mobile interface and a Pandorabot control as my main interface. The app uses the iPhone voice recognition extremely well and works great with the Pandorabot control, and changing the settings on my laptop to have the left mouse button engage in single click instead of double click mode, makes using the mobile interface really easy using the iPhone screen. And an added bonus it works over a cellular network as well as WiFi, so I can control K-9 as well as use the EZ-B camera and watch it on my iPhone for home security when I'm out. Below are some screen grabs off my iPhone showing the ARC mobile control.
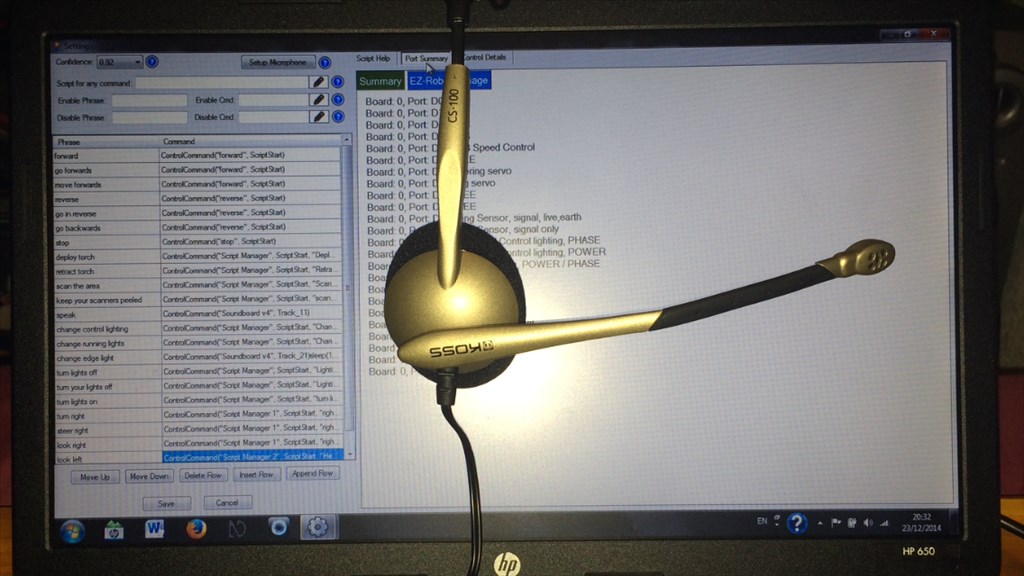
I'm still waiting for a second video camera to arrive (First one was lost in the mail, apparently), so when it does finally arrive I will put up another video showing the iPhone remote control app in action. But for now, the video below shows K-9 being controlled by a joypad and a headset microphone with a back up speech recognition control, with multiple commands such as,
"Move forwards" "Go forwards"
" Go backwards" "Reverse"
"Go left" "Turn left"
you get the idea.
My memory isn't what it was (to much beer me thinks ) so I forget commands I've programmed so having multiple commands helps towards better interaction. I put together the video to give you some idea of what my Pandorabot control does.
) so I forget commands I've programmed so having multiple commands helps towards better interaction. I put together the video to give you some idea of what my Pandorabot control does.
Voice recognition.
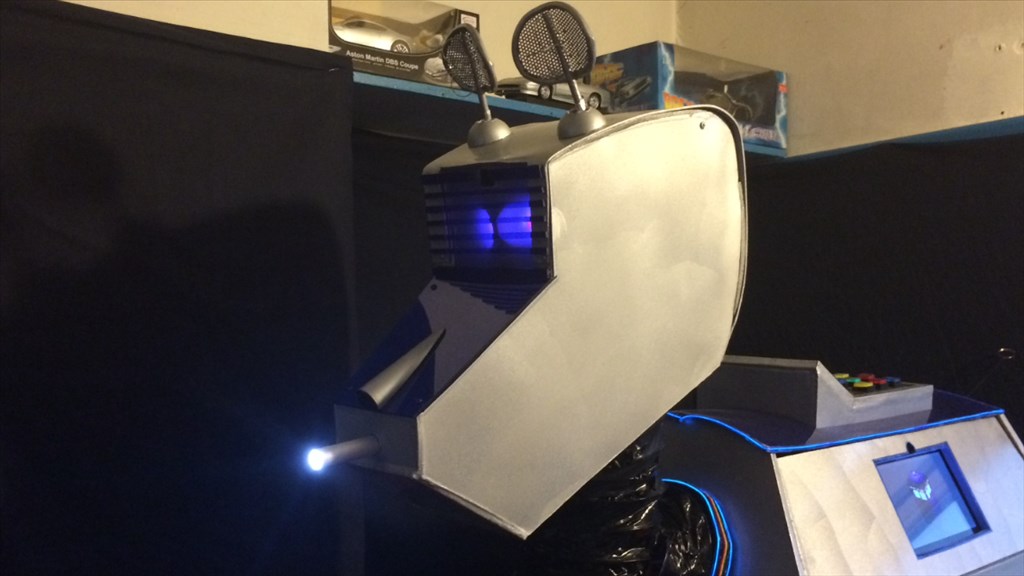
@Mcsdaver mentioned about using voice recognition, and the fact that it adds so much to a robot build, and I whole heartedly agree. As I mentioned in post #18, I am not using a permanent speech recognition control, so I have created a few scripts and inserted the control commands for them in to my Pandorabots brain files. Well, after a couple of weeks of using this, I'm pleased to say it works really well and I am having great success with it. As well as having dynamic conversations with K-9 twitching his ears or wagging his tail with responses, he now also tells me live news and weather updates via RSS feeds (thanks to d.cochran, Rich and Richard R for all your help with that ), as well as simple commands such as, "Move forward" "Turn Right" "Deploy Torch" ect, just like what the voice recognition control would do, and all of K-9's responses are spoken through the EZ-B breakout speaker.
), as well as simple commands such as, "Move forward" "Turn Right" "Deploy Torch" ect, just like what the voice recognition control would do, and all of K-9's responses are spoken through the EZ-B breakout speaker.
One thing I will say is that the Pandorabot control can, at times, be a little sluggish due to pandorabots busy servers, so I always keep a joystick, my iPhone or the remote On/Off power fob to hand to take over or kill drive movements that are slow to respond. A good thing about Pandorabots AIML is the use of wild cards ( * ) in the responses which helps with SAPI voice recognition mis hearing words, for example you ask
"Robot. Can you move forwards please?"
and the speech recognition hears
"Rabbit. Can who move forwards please?"
and get the wrong response. Used carefully, as long as you have the key words "move forwards", you can say,
"(Whatever) (whatever) move forwards (whatever)?"
and you will get the correct response, and a useful way around SAPI voice recognition accuracy. Important if you are controlling robot movements using the Pandorabot control with long commands.
From "Robot. Can you get me a beer from the fridge please."
to " * get me a beer * "
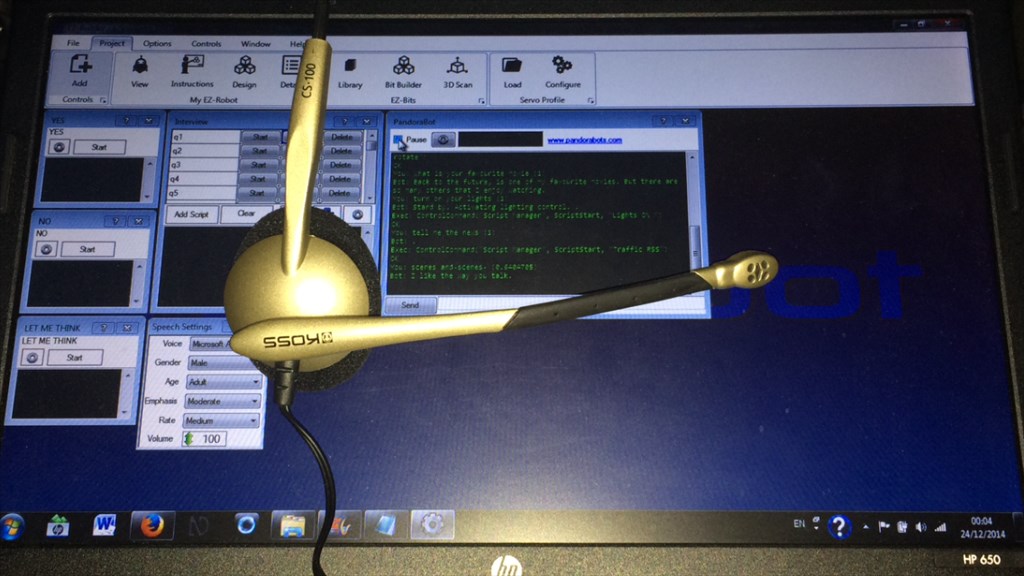
All of my Pandorabots brain files have random responses for every question asked by a user, a lot of work, but it's worth it, as it does give K-9 a very unique personality. So before my other video camera arrives, the video below is a short interview with K-9 using a Pandorabot control with what is mentioned above, along with the headset mic and some ControlCommand scripts added to K-9's responses. A bit of fun, but a good demonstration.
NOTE!
There are a couple of edits in this video to cut out a couple of long pauses and the occasional speech recognition error, but 95% is as it was filmed.
It's Christmas
And finally, for a bit more fun, here is my entry for "The Holiday Robot Contest". Some of you have already seen it on the contest thread, but for those of you that haven't, here it is. Enjoy .
.
I started doing his head movements and lights in a long script control, but then decided to use the soundboard editor which was great fun to use. It is K-9's first Christmas so you will see him looking at his little Carol book to remember the words while he sings . The transporter effect I got from a special effects editor app from the guys at Bad Robot, and I was looking for a reason to use it. And best of all, he left me a lovely Christmas Present too.
. The transporter effect I got from a special effects editor app from the guys at Bad Robot, and I was looking for a reason to use it. And best of all, he left me a lovely Christmas Present too.
That's it for this update. I hope you enjoyed the videos. There are more to come soon.
Steve G.


Steve G, Just fantastic! I like how K9 leads with his head direction, many great features. That is an awesome big K9. I loved seeing him go through the doorways and navigating around.
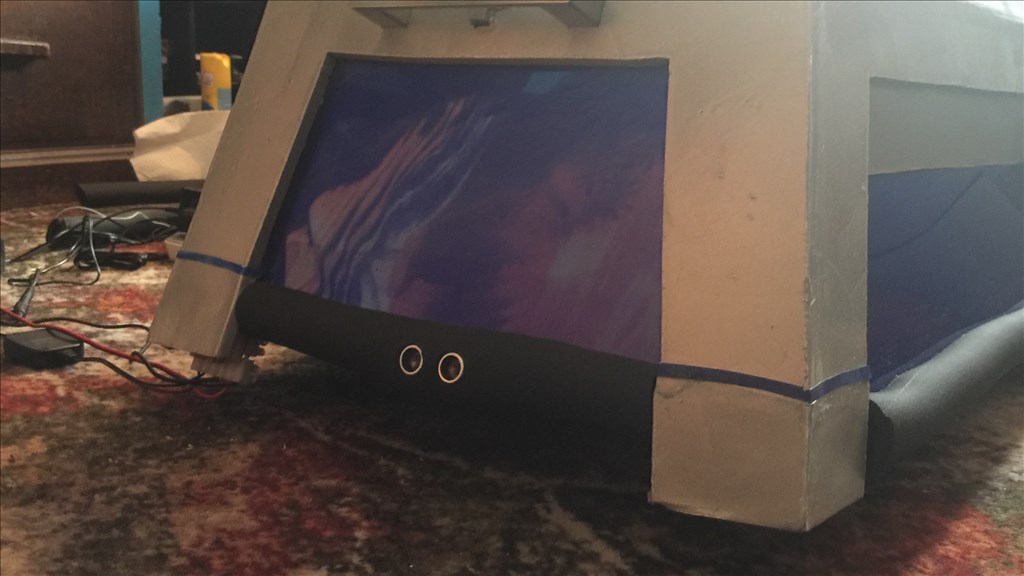
Thanks for sharing. Christmas video is great. The side panel screen adds a lot to his look. Steve S
@Steve S.
Thanks for your kind words and glad you enjoyed the videos.
I must admit the head turning while he steers was an after thought. After the initial test run I wanted to know which way the front wheel was facing and was going to hook up K-9's ear servos to point to the turning direction. But I went with the head idea instead to reduce overswing, and after testing it, it just looked... well, natural (for want of a better word).
He's just too cute!
:) Thanks @EEGbiofeedback. Glad you like him.
Thanks @EEGbiofeedback. Glad you like him.
UPDATE 2.0/3 ===========
Time for another short update to let you what's going on with K-9, and I also have a couple more videos for you to watch.
VCN Remote iPhone App Video.
I have finally managed to make the video I said I was going to put up demonstrating the VCN iPhone app I have which I currently use to control K-9. I use one of the ARC windows which has a mobile interface, Pandorabot control and connection control. No need to say anything else as the video says it all. Enjoy.
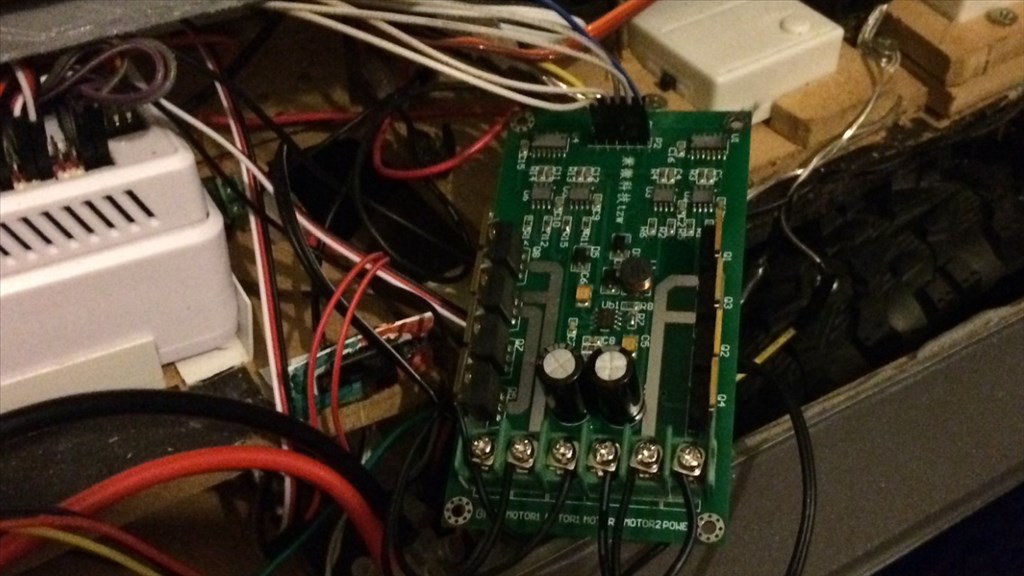
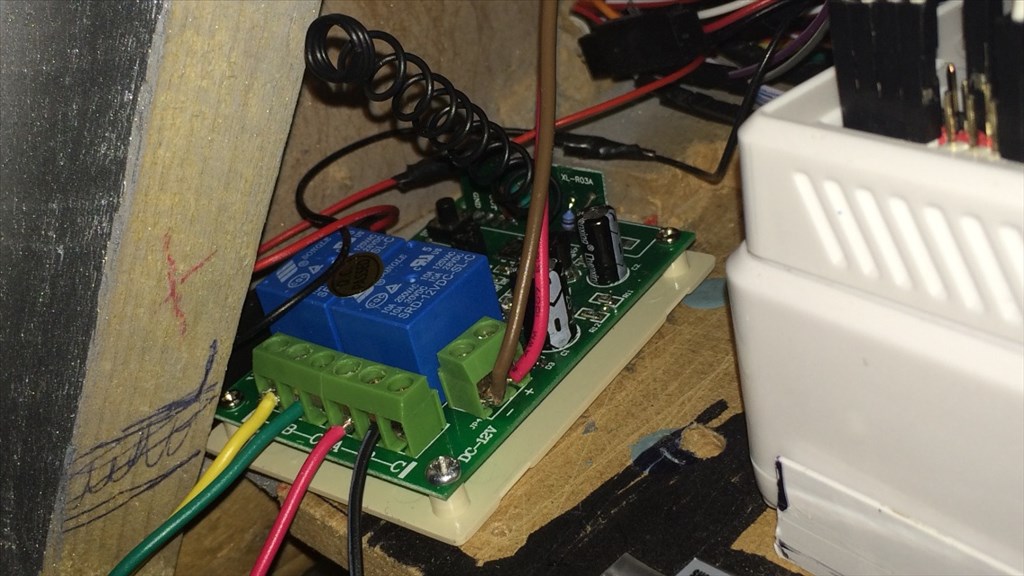
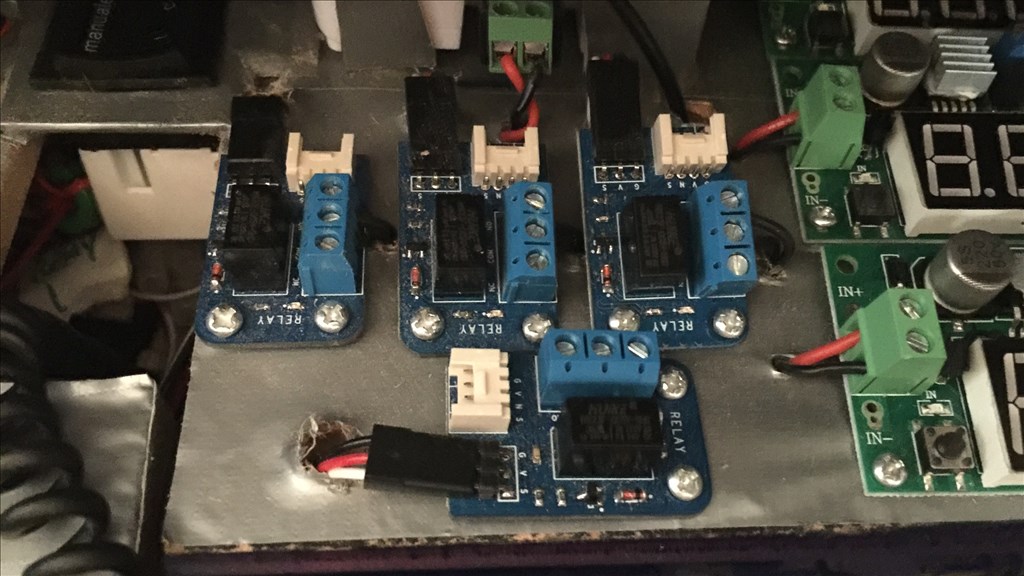
Remote Control Power Switch.
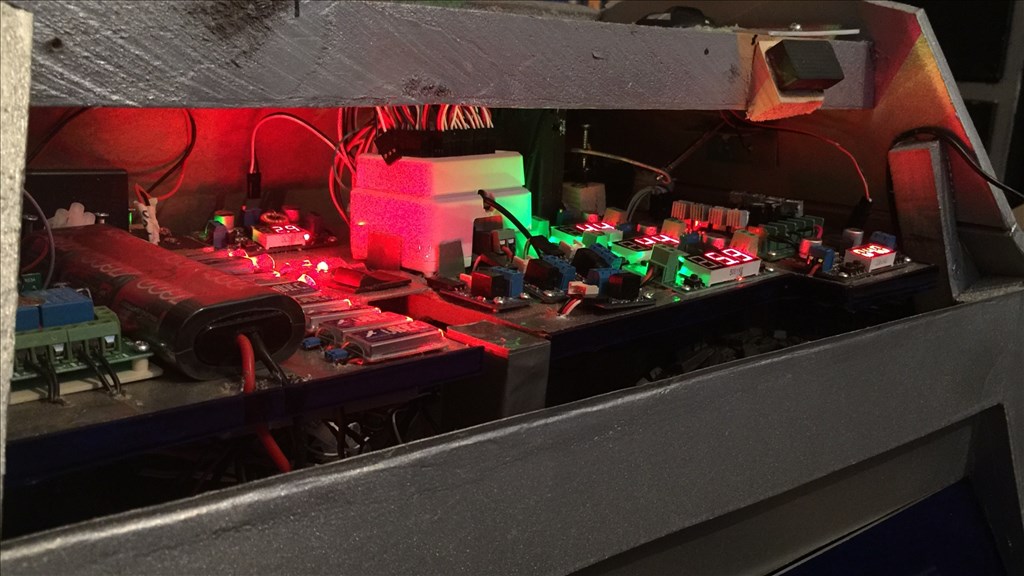
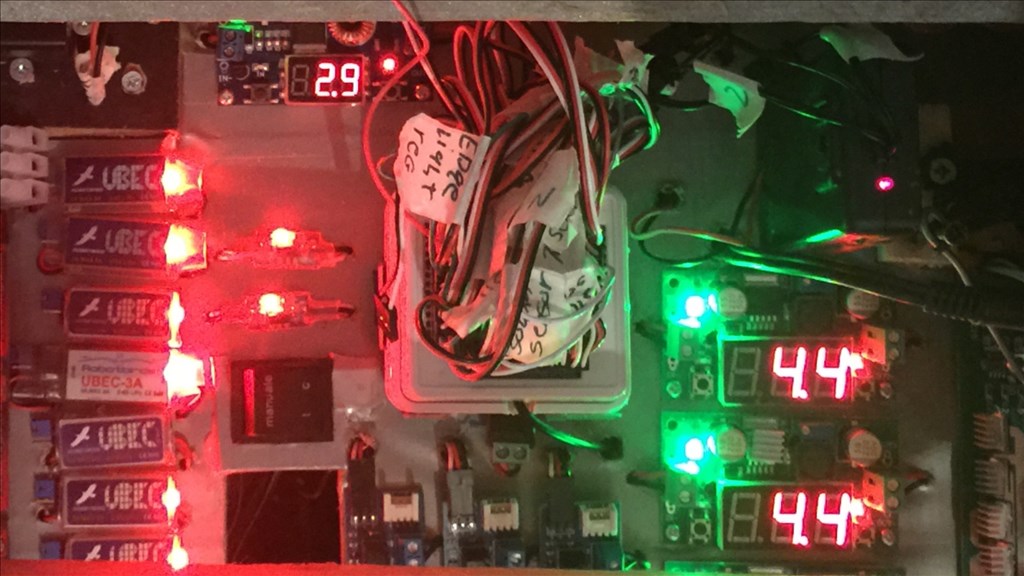
I have installed a new two channel remote control relay switch to replace the single channel one. This now powers On/Off the EZ-B and my new 10a motor controller. It was Richard who suggested using a two channel controller (thanks again dude ) as the new motor controller had a nasty habit of making K-9 take off when I applied power to it before the EZ-B was connected. The remote has now taken care of this so all I do now is press button "A" on the remote fob to power On the EZ-B, and when connection established, an init script starts to set the PWM to zero, then I press button "B" to power up the H-bridge. And I press the same buttons again to power Off. Works like a charm.
) as the new motor controller had a nasty habit of making K-9 take off when I applied power to it before the EZ-B was connected. The remote has now taken care of this so all I do now is press button "A" on the remote fob to power On the EZ-B, and when connection established, an init script starts to set the PWM to zero, then I press button "B" to power up the H-bridge. And I press the same buttons again to power Off. Works like a charm.
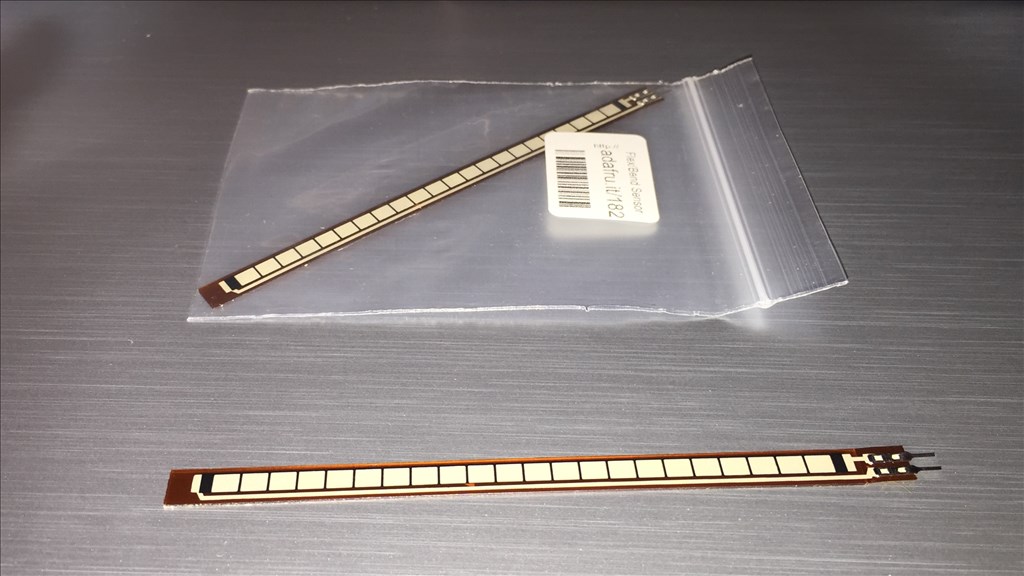
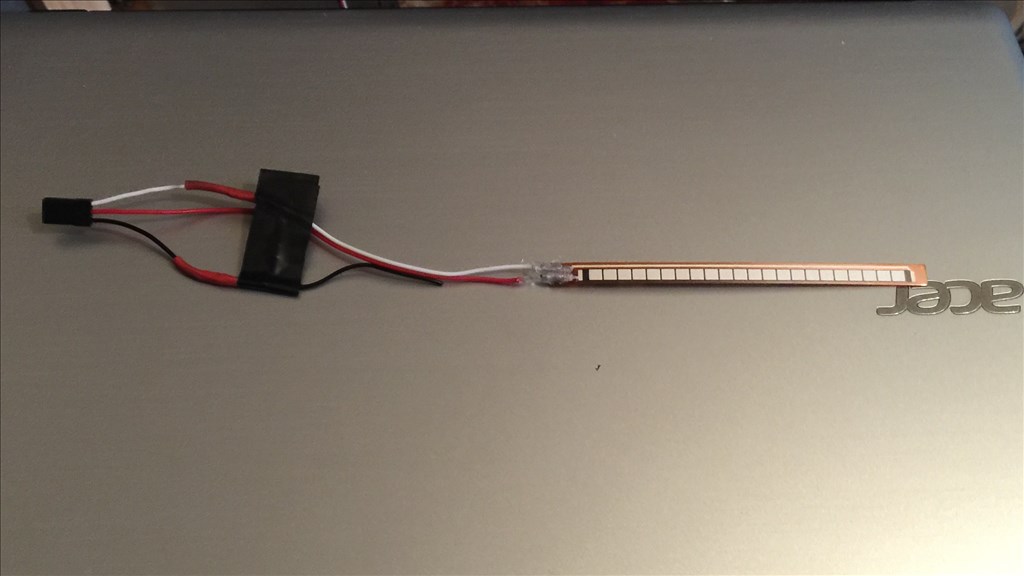
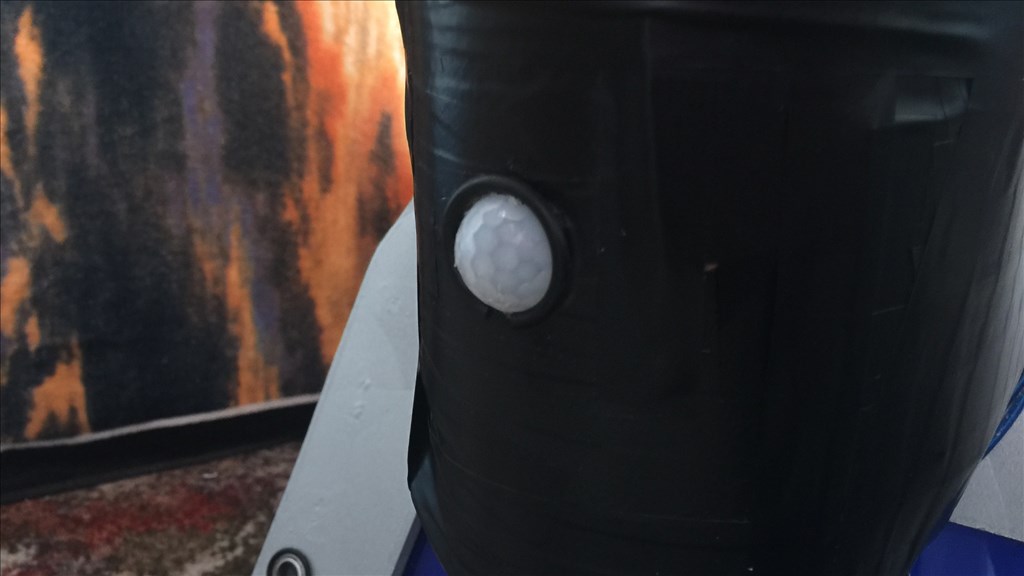
Smoke Detection Sensor.
K-9 is now a mobile smoke detector . Again I have to say a BIG thanks to Rich and Richard for all their help (and patients) helping me to get this working. It's the first time I have used an ADC port and analog sensor, and now I have I'm looking to add more now.
. Again I have to say a BIG thanks to Rich and Richard for all their help (and patients) helping me to get this working. It's the first time I have used an ADC port and analog sensor, and now I have I'm looking to add more now.
Anyway, the sensor has two scripts and sits idle with an ADC value of about 50, so when smoke or gas is detected and the value hits 70 or more the first script runs and K-9 will tell me he has detected smoke. And when it hits 100 or more, the second script takes over then K-9 starts to panic and warns me again. The scripts I ended up with need a bit of cleaning up, but at the moment they work ok. Check out the short video.
Well that's it for now. I hope you enjoyed the videos, and if you have any ideas on what other 3.3v or 5v ADC sensors I could add that you may like to see or could be useful, I would love to hear your ideas.
Steve.
steve G
thats very usefull.
What in particular was useful to you nomad? confused Did you mean the smoke/gas sensor?