
















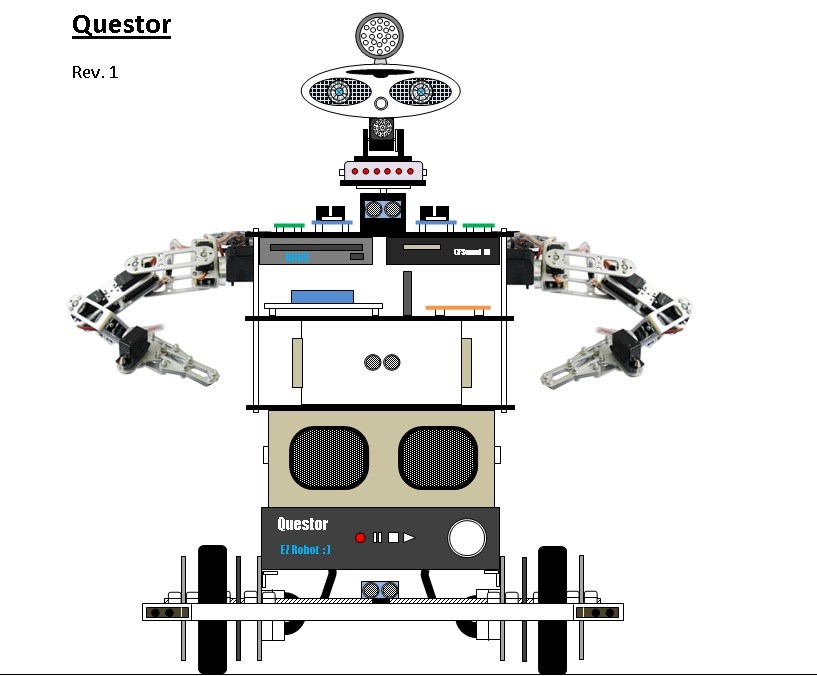
Introducing Questor.
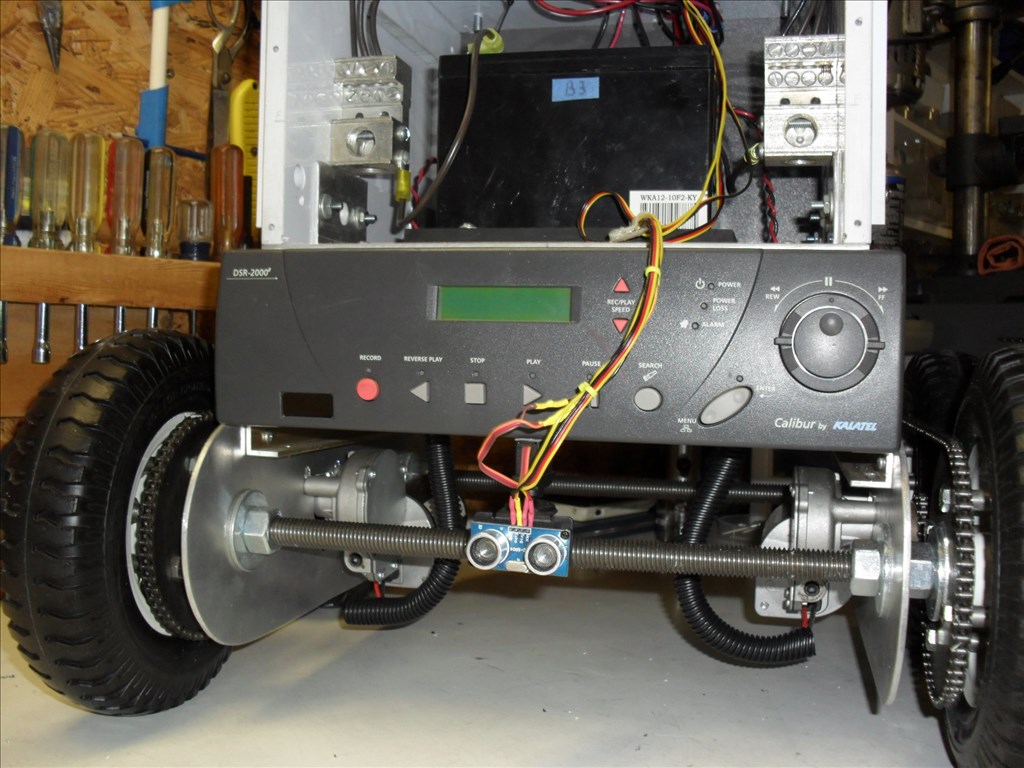
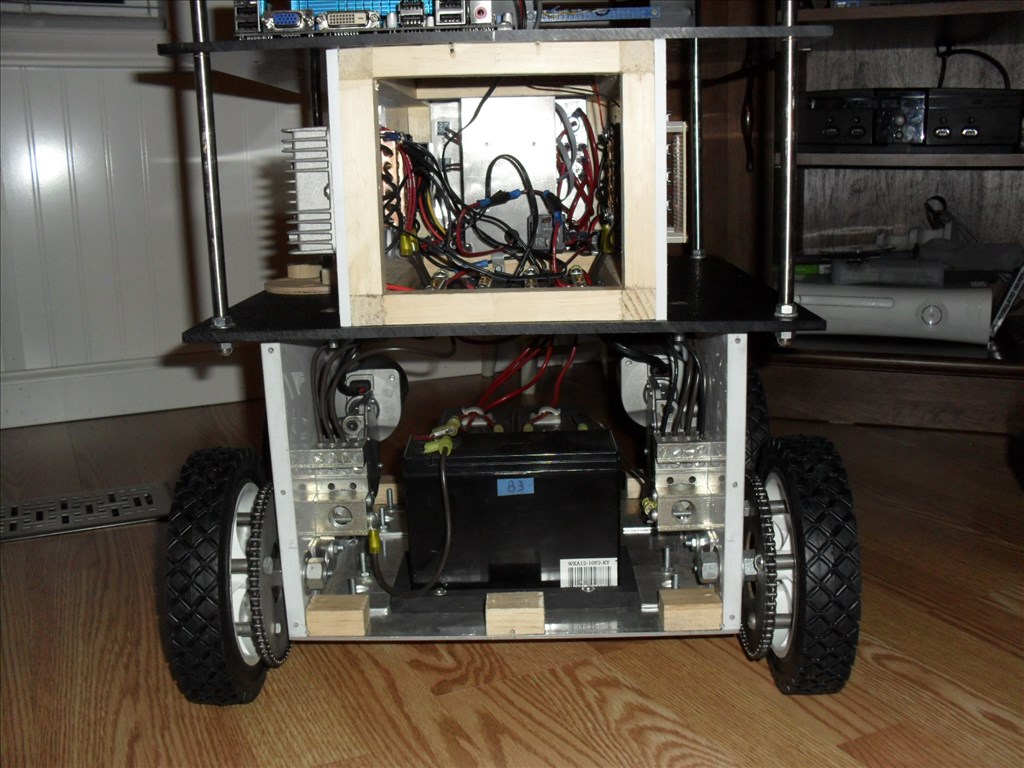
I put a hold on my large robot project Magnus awhile back due to budget and time constraints. I wanted to have a platform that was way smaller, easy to modify for testing purposes and small enough to roam around inside the house autonomously. Questor will serve as a test platform for systems that will eventually be placed in Magnus. Questor was not intended to be a cool looking robot platform, just functional and very basic in appearance. My main goal is for him to be autonomous with the option of me being able to take over remote control separately if needed. I would like for him to be able to automatically find and connect with his battery charger and to eventually have a good A.I.
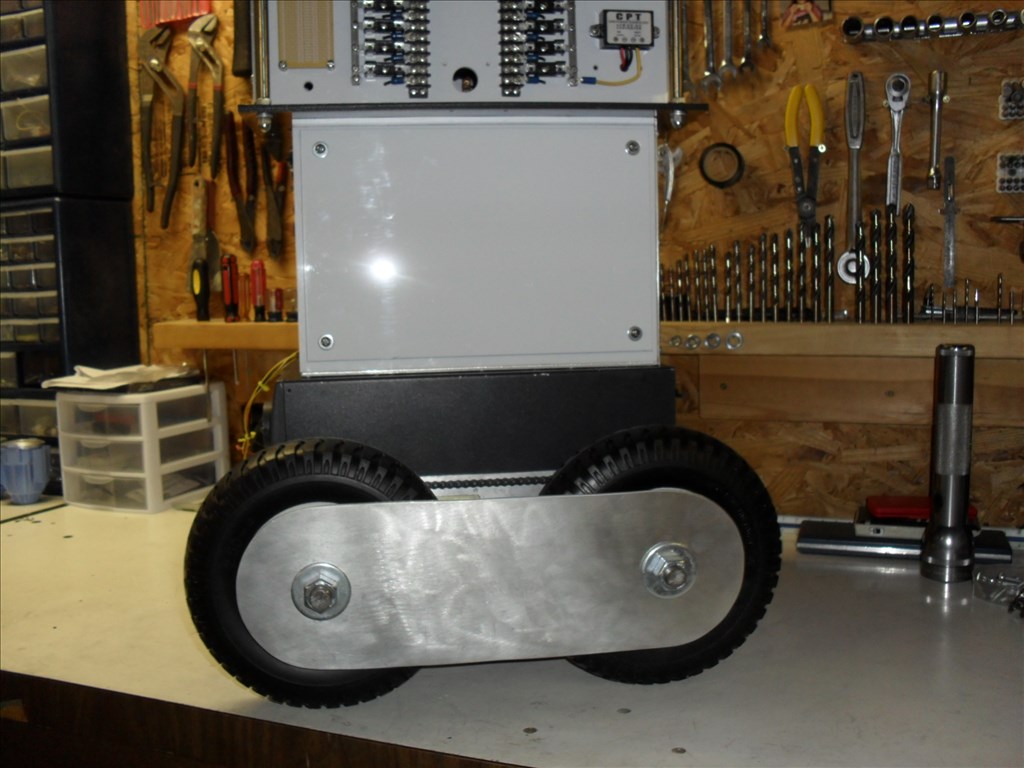
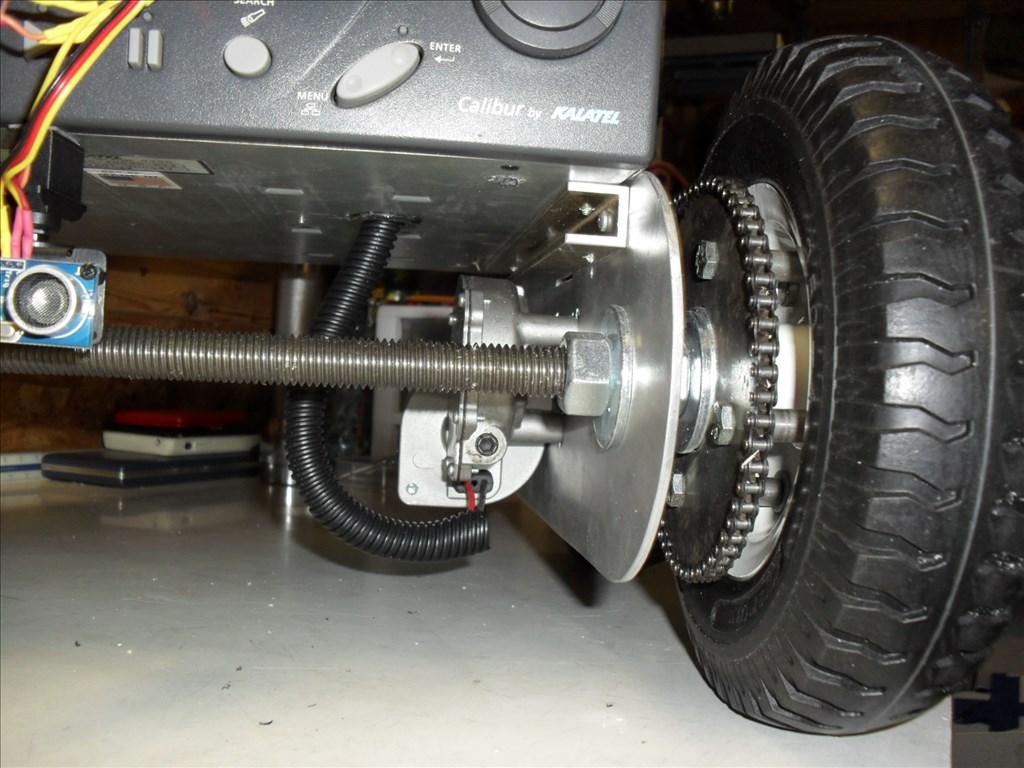
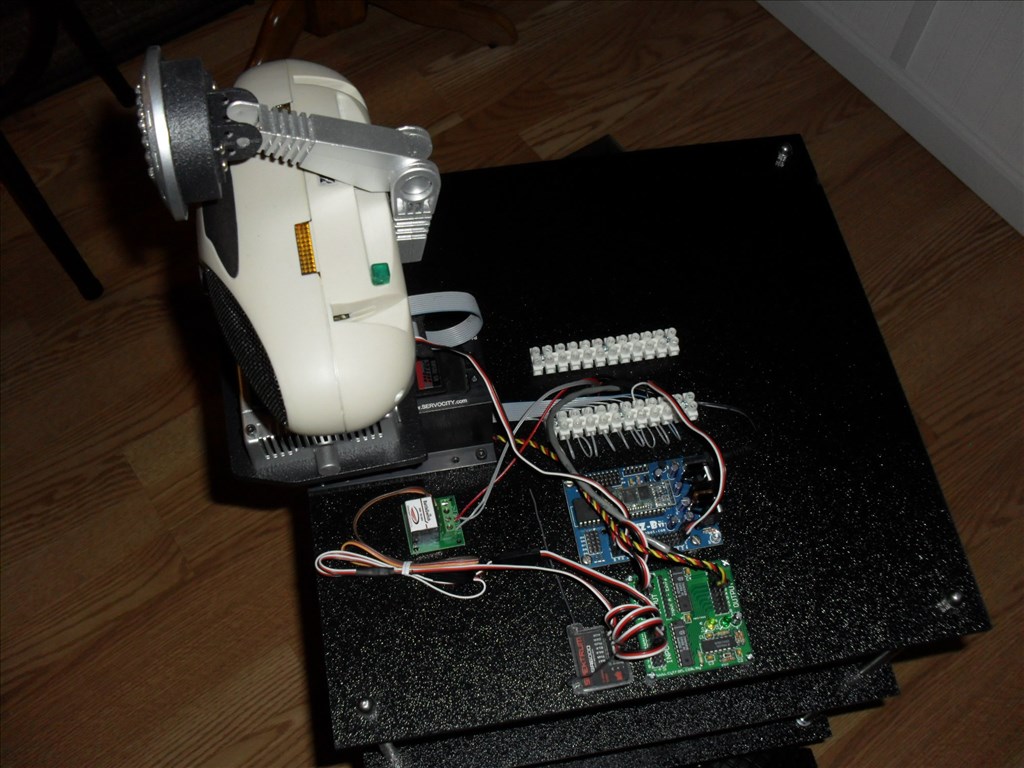
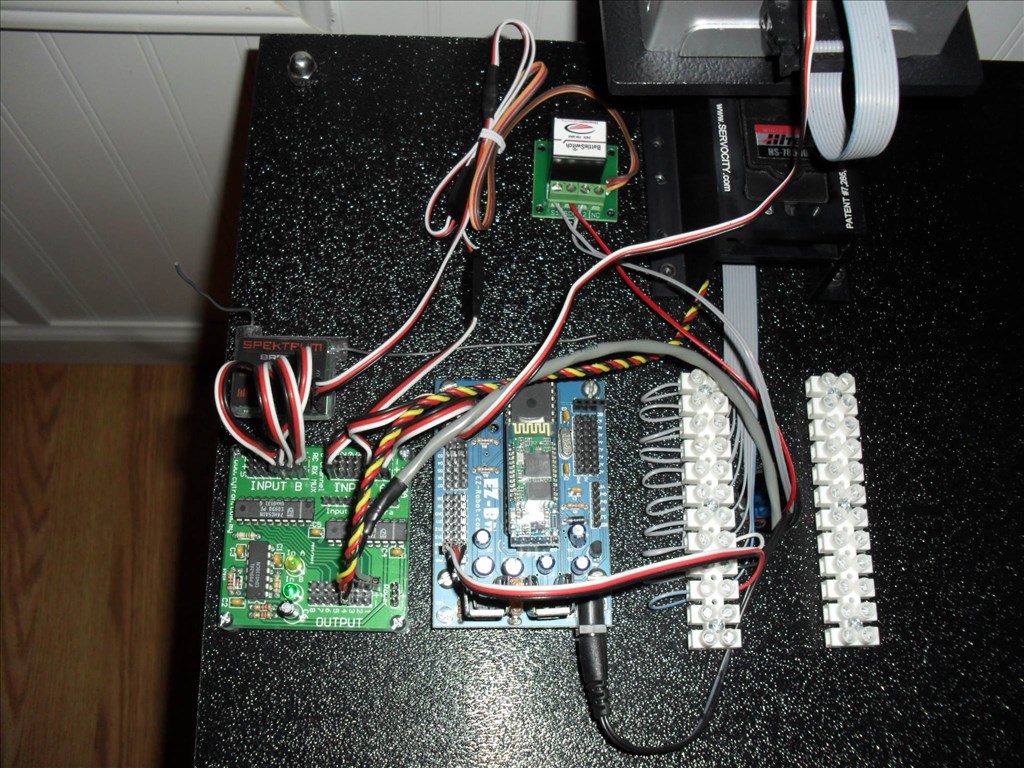
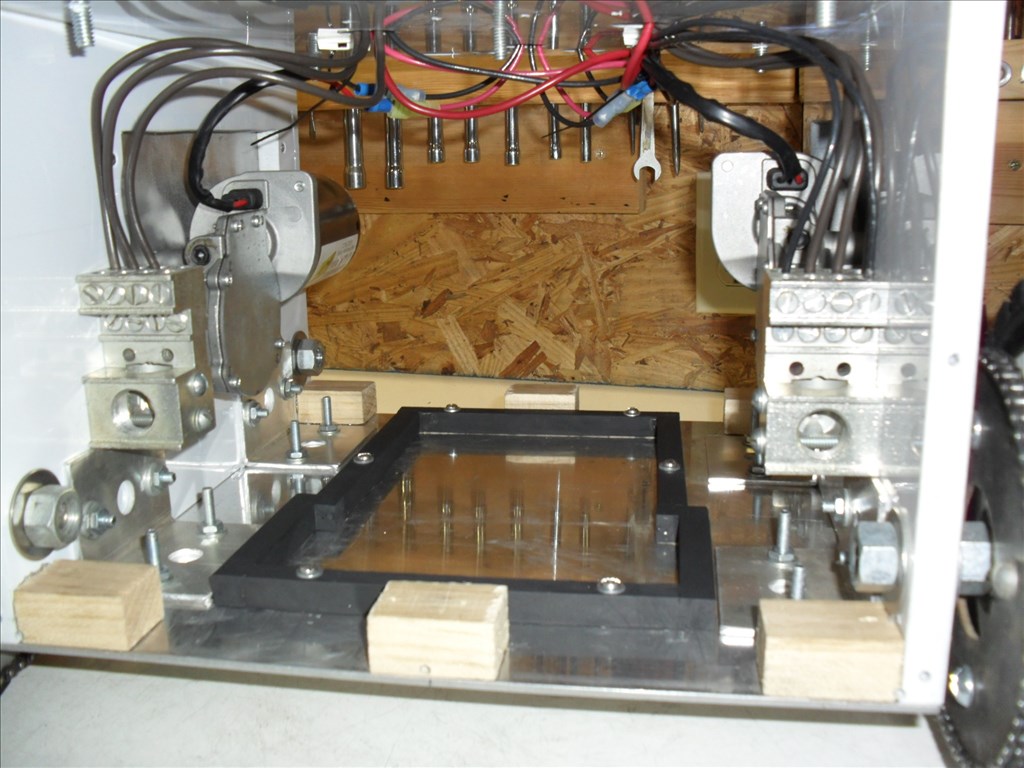
So here is a first look at him...












Weird....the pictures below [b]this line were not intended to be here in this first post. When I made the new post below, it saved the pictures in this post also. When I tried to go back and edit them out of this first post they don't show up on the thread so I can delete them. They belong in the post below....see details for the new wheels in the later post.[/b]
Discover more robots

Jeremie's Ravage The VHS Tape Robot

DJ's Ez-B V4 Dalek


Wow, he is a beauty! Great job dude.
This is a serious looking robot.
Wow! Questor is awesome! I love the look and the ease of access. Very clean and professional looking.
Awesome work dude! Where you been hiding this guy , not in a breadbox I'm sure. I like the industrial heavy duty feel. Surely you will bring him/her to makerfaire!?
That is awesome. BTW the name Questor has a special place in my heart so maybe I'm a little bias.
rgordon, Your project is an excellent work. All of the different layers and features are well built. If that is your test platform, I can,t wait to see the final product! Steve S
Good Job! It is Tight!
Thanks for all the nice comments! I got the name from Gene Roddenberry's movie The Questor Tapes.