













-635113052047031250.jpg)















This is my first showcase of my robot. Her name is Captain Ann Droid. My last robot was built 25 yrs. ago. When I told my wife and daughter I was going to build a faster and smarter robot they told me it should be a female? She uses an Irobot Create platform, EZ robot kit and software, Radio Shack blue tooth speech unit and other parts. EZ robot has been far above my expectations. Thanks D.J. I hope my links work. Steve S
Thank you to the EZ robot community


By Steve S
— Last update
Discover more robots
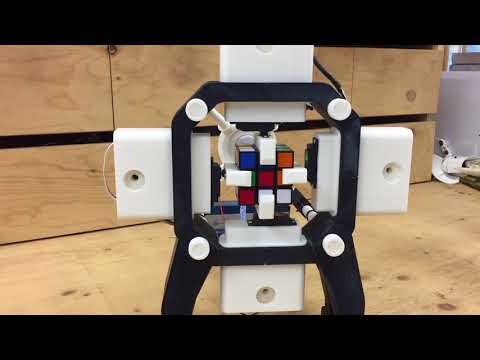
Bhouston's Rubik's Cube Solving Robot
Run a Thingiverse 3D-printed Rubik's Cube robot with EZ-Robot servos and IoTiny; plugin for cube-solving, arm/gripper...

Tmesserschmidt's Topsie The Easy To Build Robot Dog
Build Topsie, a low-cost DIY quadruped-no 3D printing or soldering; assemble in a week and program walking gaits with...

Jdebay's What Should I Do?
Decide whether to wait for a replacement servo or use a faulty servo as a placeholder to fine-tune your JD robot's...

Bluetooth speech unit? Could you link that? Very cool , can you still vacuum? welcome to the community- Josh S
Nice!
Josh S I do not have a link, but the unit is Auvio bluetooth portable speaker @ Radio shack model 4000375. It has great speech quality and bass for the money. ($59 on sale, 79 reg.) Both of Roomba units had trouble, so I got a Irobot Create, no vacuum. I can't get camera tracking or video recording going. It worked in December, but not since then. I have even tried the camera example functions. It will not even take a picture. Maybe I need to turn on more microsoft fuctions? Thank You Steve S.
Steve, I LOVE your design. could you share many pictures, especially the body part. Where did you get that?
Your design looks Tight. Mine is sort of sloppy. I built Marti about 4 times trying to get her to be Tight. But, I like your design. Please share photos and info.
Thanks,
MovieMaker
Thats awesome and great VR! Great work Steve
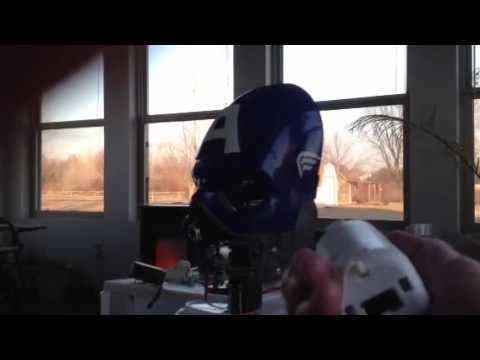
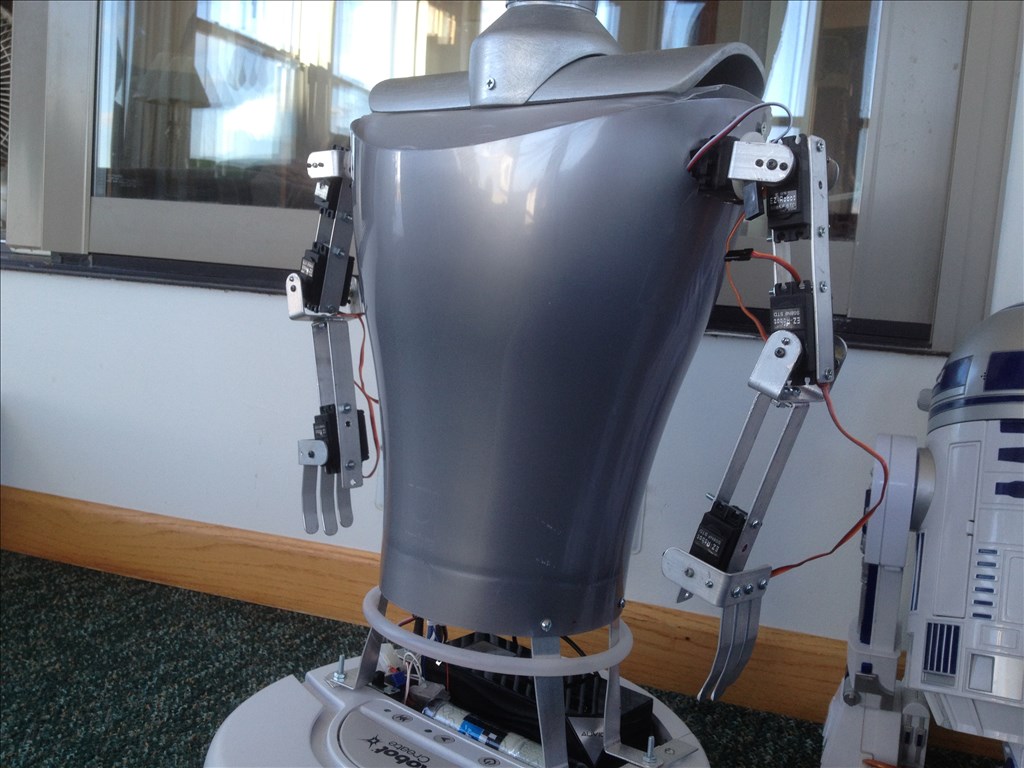
Here is more info on Captain Ann Droid with some pictures, She is a little more than 2 and 1/2 ft. tall, about 17" wide (servo to servo), and weighs in @ about 11 lbs. including I Robot battery and 6 cell Radio shack battery for servos and EZB controller.
Her main body is a designer waste container I purchased @ Target. I think the link below is similar. https://www.amazon.com/Umbra-Garbino-Polypropylene-Waste-Silver/dp/B004LLHEIA/ref=sr_1_7?s=home-garden&ie=UTF8&qid=1364084966&sr=1-7&keywords=umbra+waste+cans
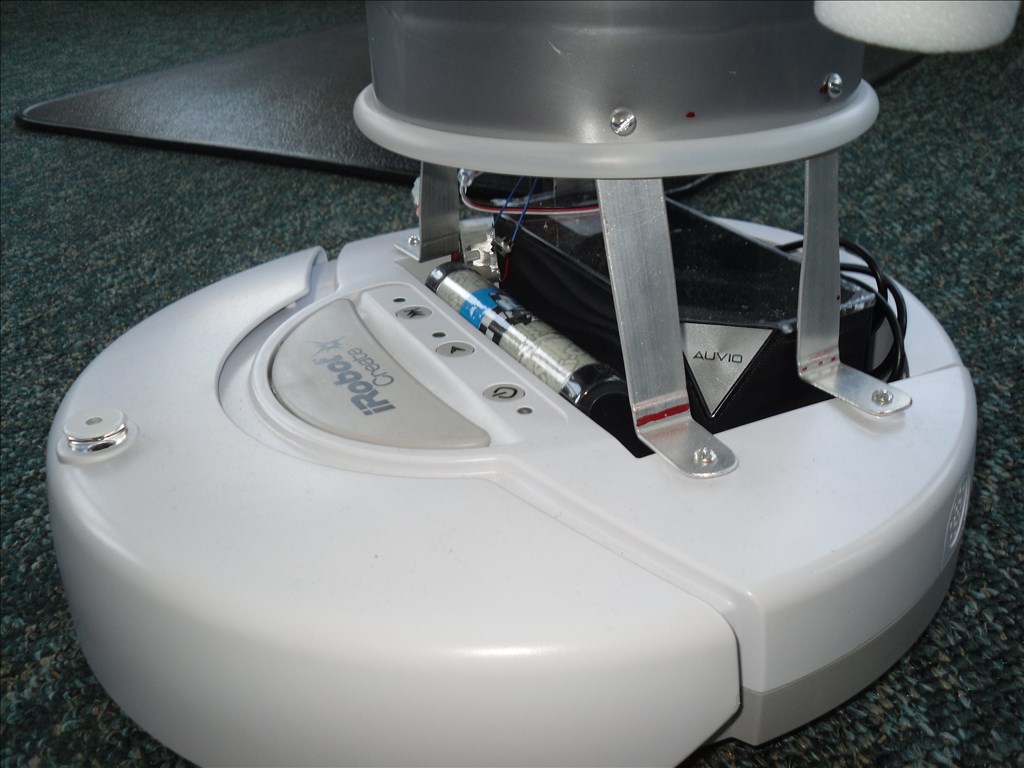
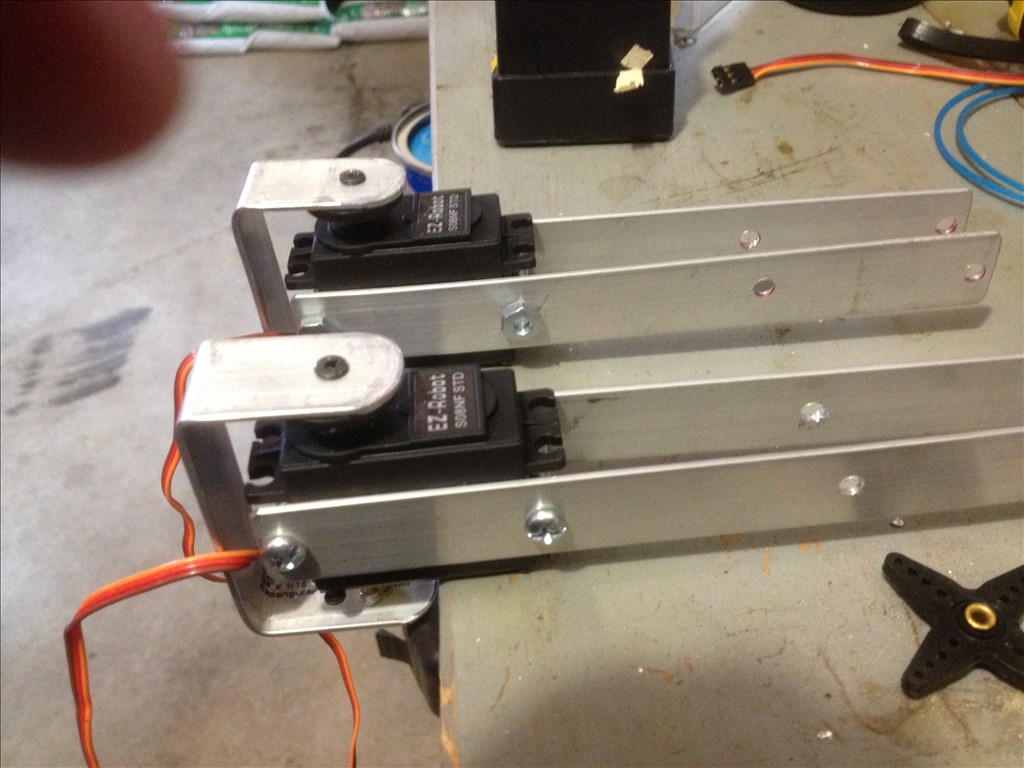
I rounded the ends of a 1 x 3 with a jigsaw to fit inside the body and give her an elongated width. The large 1/4 scale servos are connected to that. The arm servo brackets are homemade from aluminum that hold the standard servos. She now has only foam arms, but I plan to build an elbows and claws in the future. The head is a childs mask that I formed narrower. servo and camera brackets in the head are homemade steel and aluminum. Her blue LED eyes are from Walmart automotive. Her skin covering on eye sockets, face, and chest is flexible thin cutting boards from Ace hardware. I spent a long time heating and bending plexiglass for her chest, but it cracked. I can easily view my connection status LED's on the EZB and lift the current skin to access the EZB. I am pleased with Radio shack Auvio bluetooth speech speaker. I modified the 4th wheel on the Create to provide less rocking. I would like to add a simple sound activated light for a mouth? Thank you for your positive comments
That is AMAZING!
Only one question left. Where is your Notebook for windows? If you check Marti under the section of show our robots, you will see how I have her made.
I LOVE your design.
:D
I, for one will be watching your progress!