

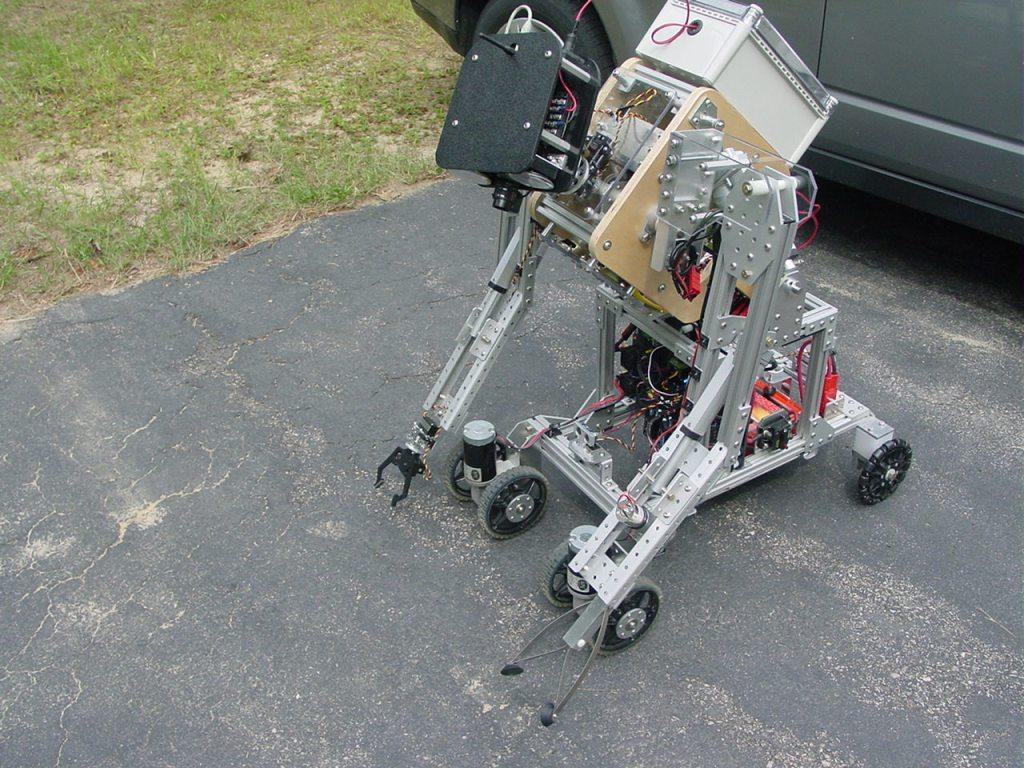


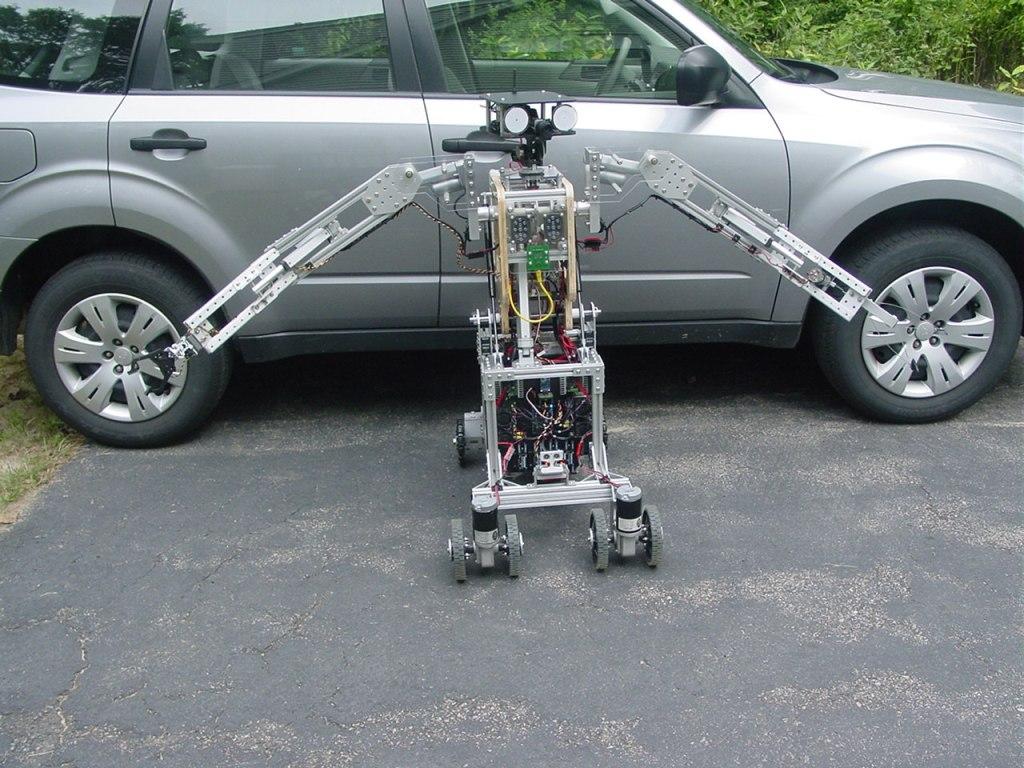
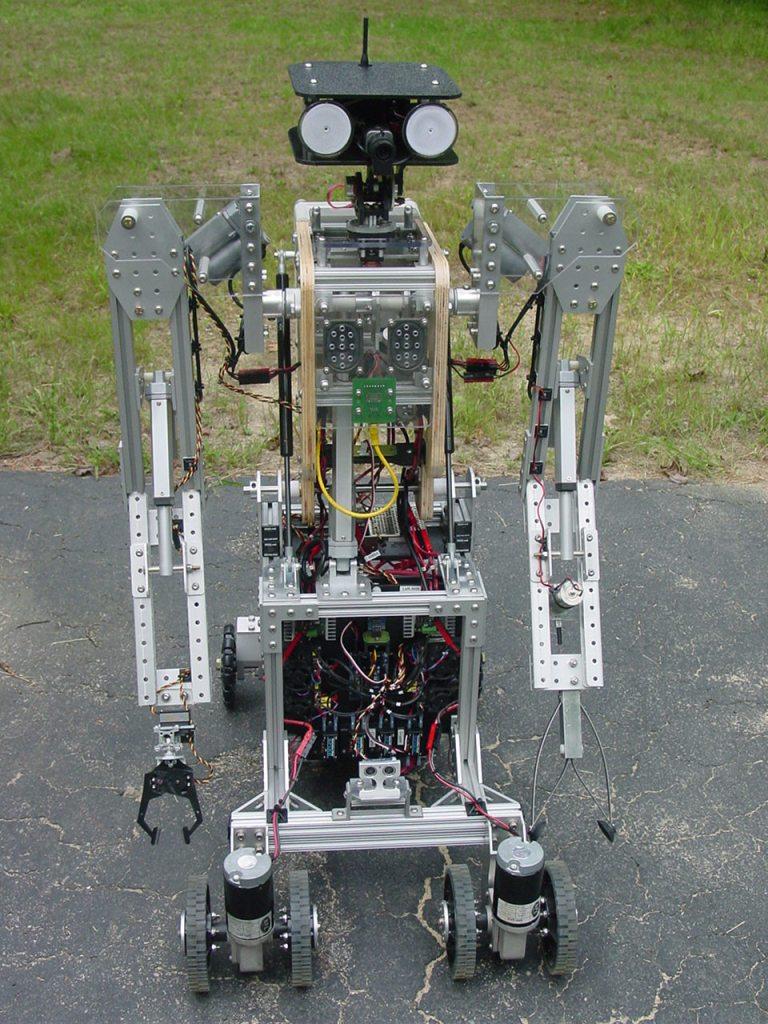

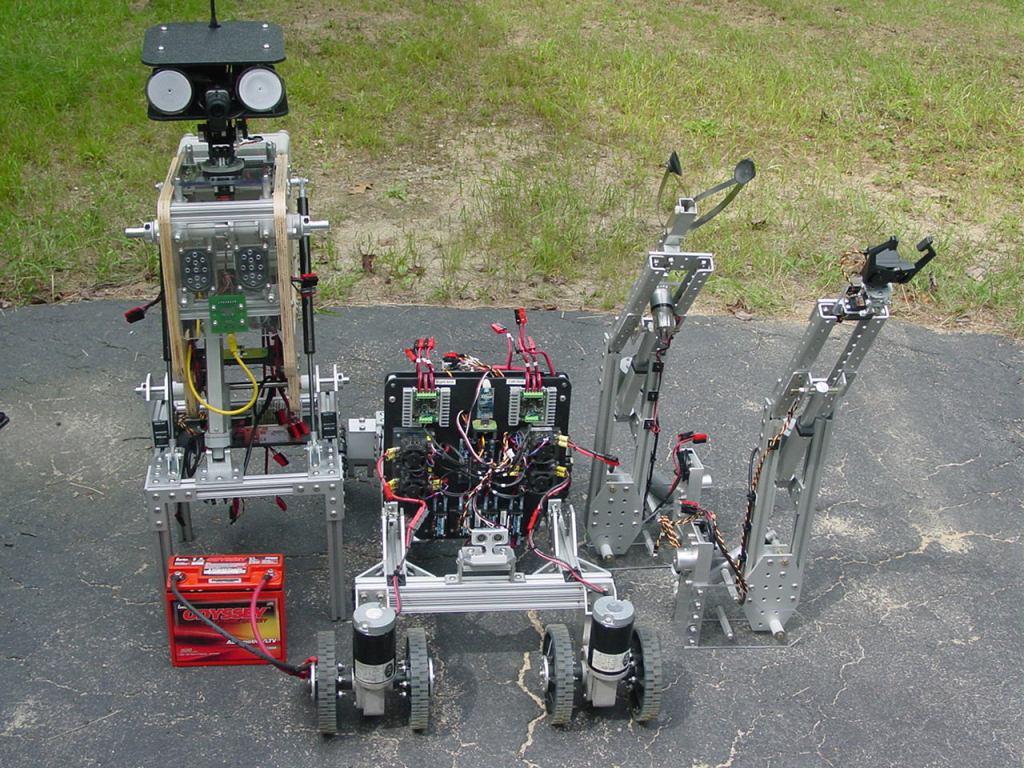








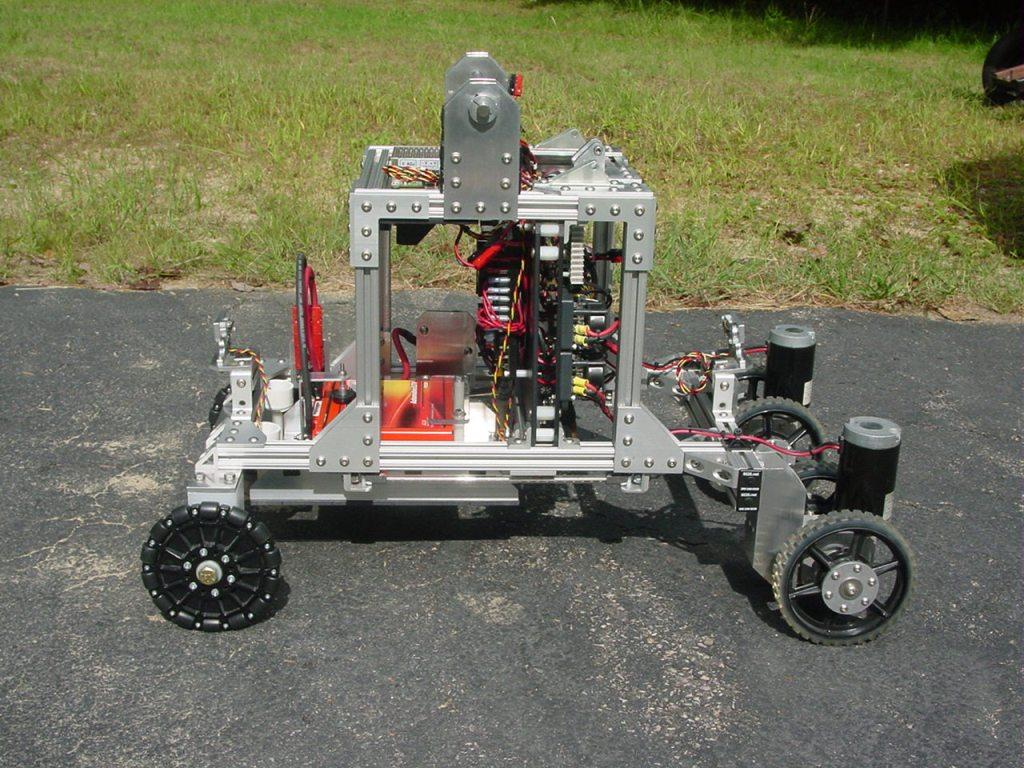
For the last decade or more I've been working on a series of large robots with articulated arms. I just finished the latest version, ARMadeus Mk7. Considered mid-size compared to some of its descendents, it measures 48" tall and weighs 112 pounds. Some of the main components include:
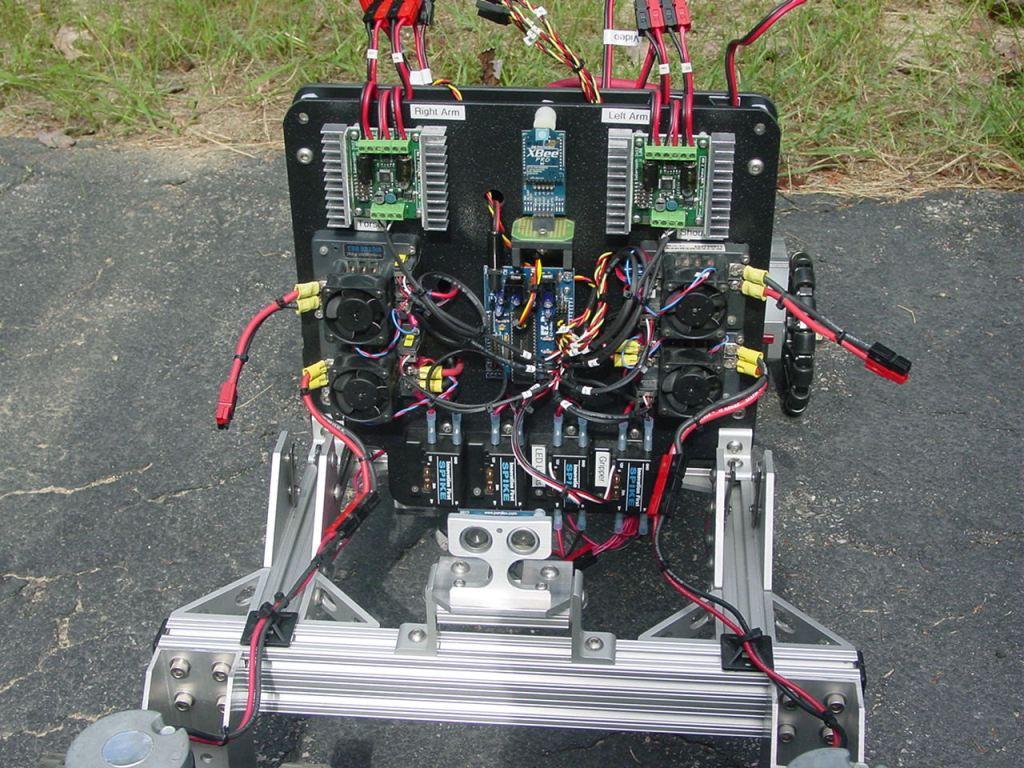
(3) 12V DC gear motors (4) Servos (6) 12V linear actuators (4) IFI Victor 12V speed controllers (2) Sabertooth 2x12 speed controllers (2) IFI Spike H-Bridge relay modules (1) Audio player (1) video camera w/ 2.4GHz transmitter
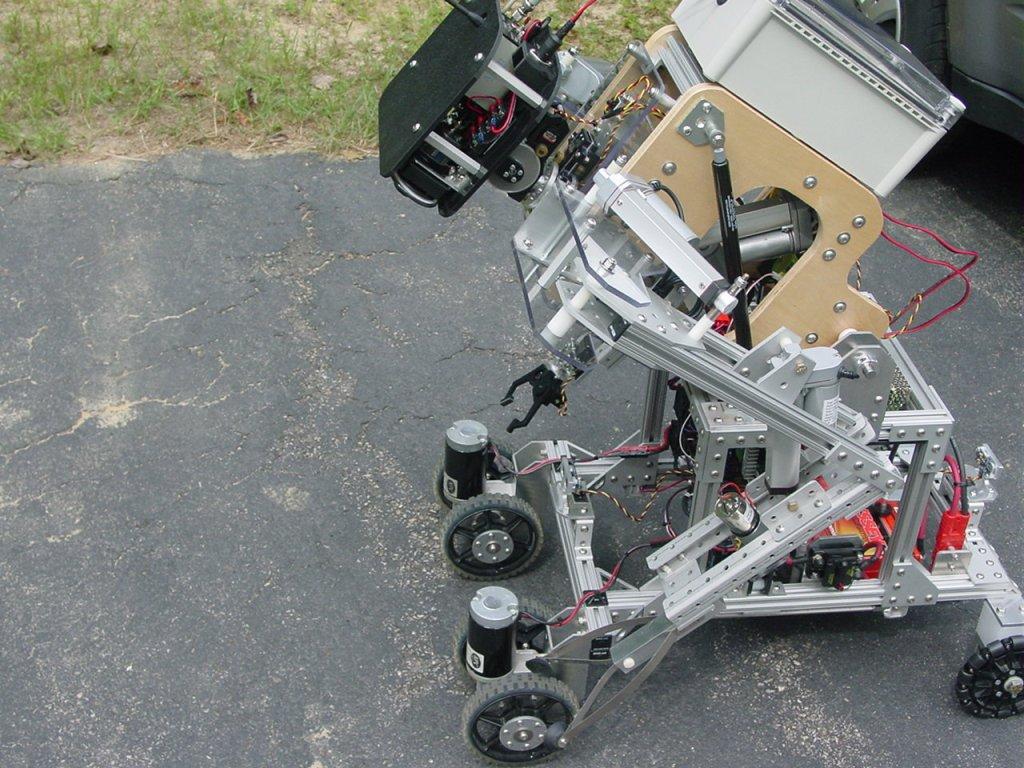
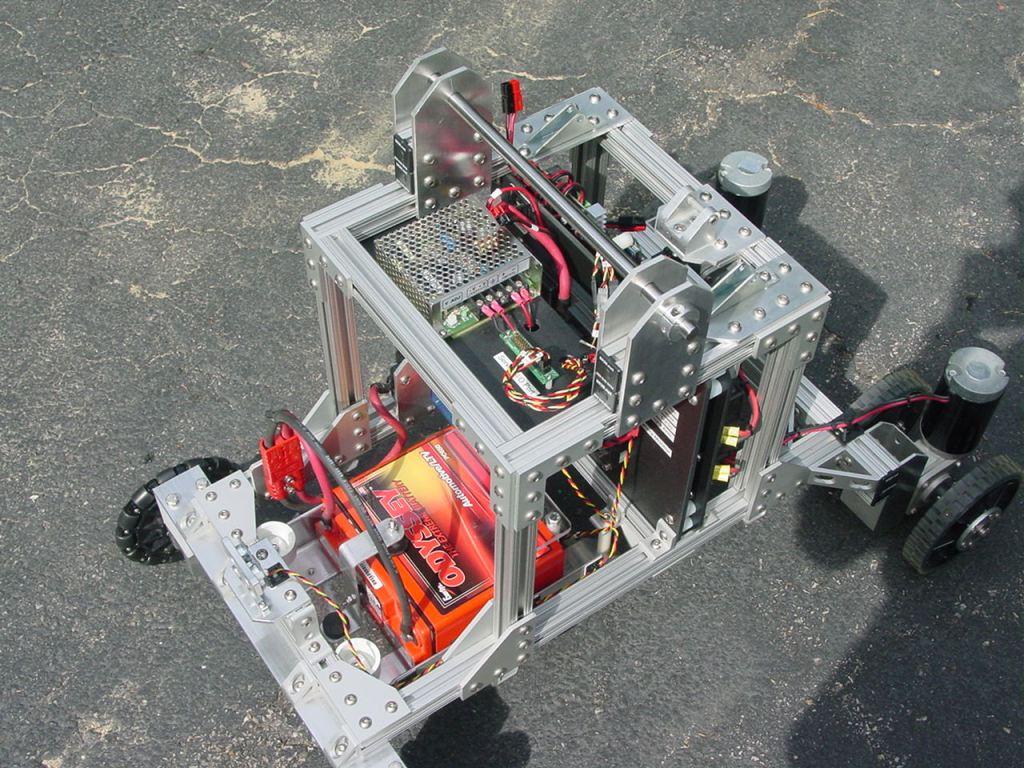
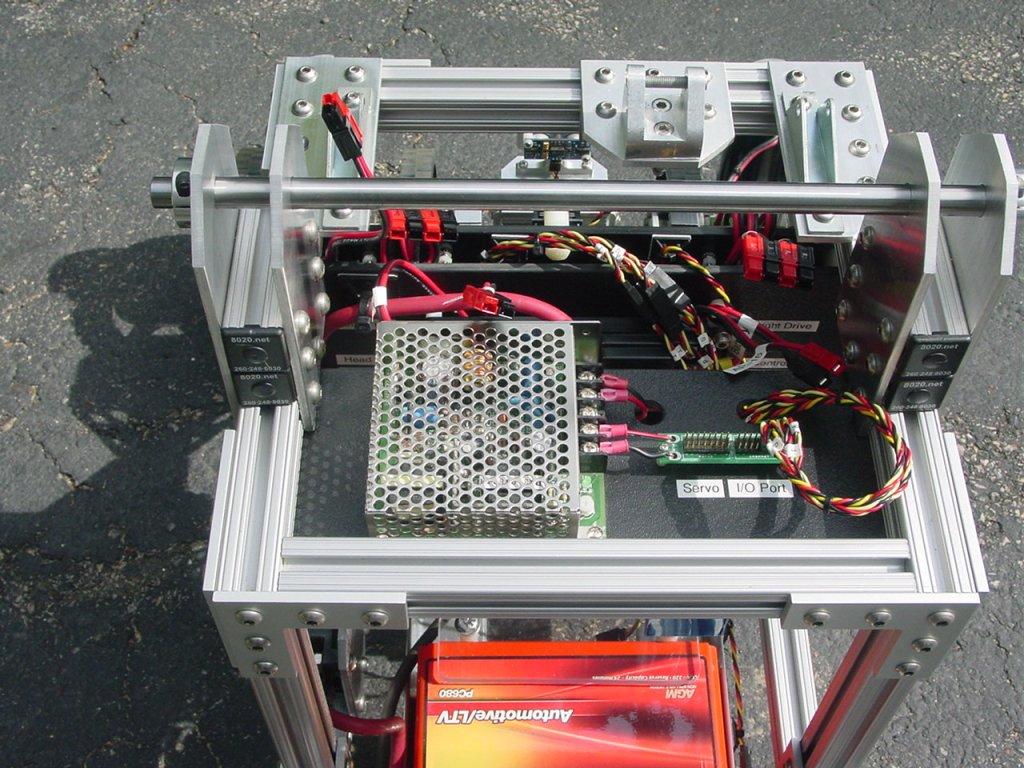
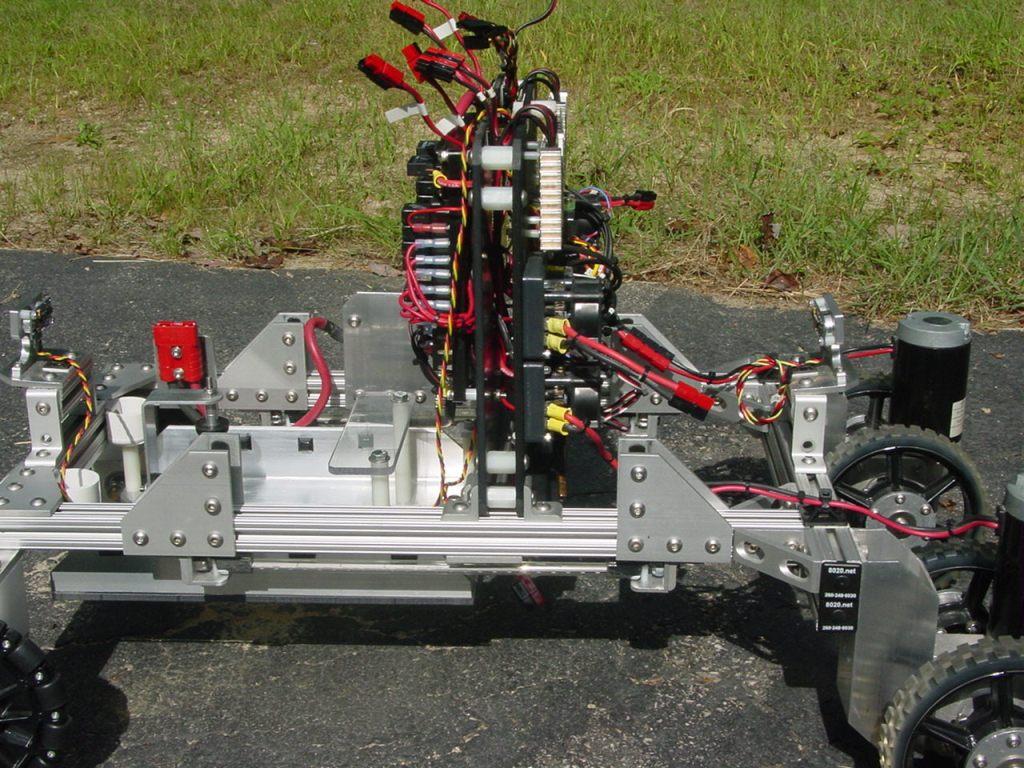
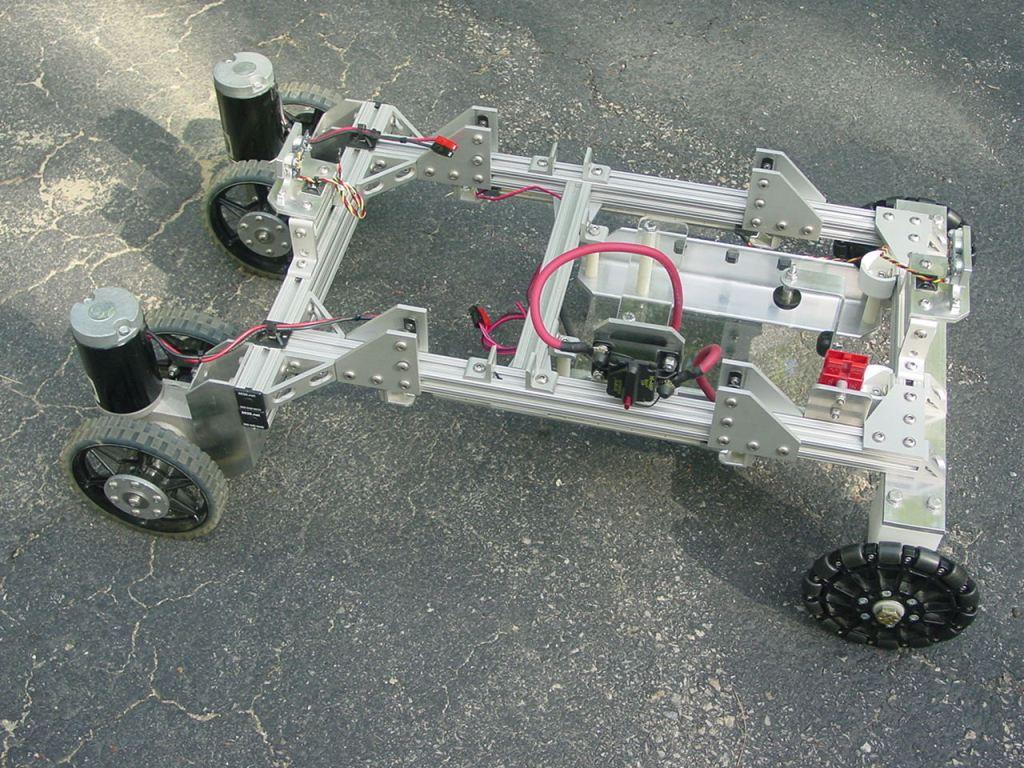
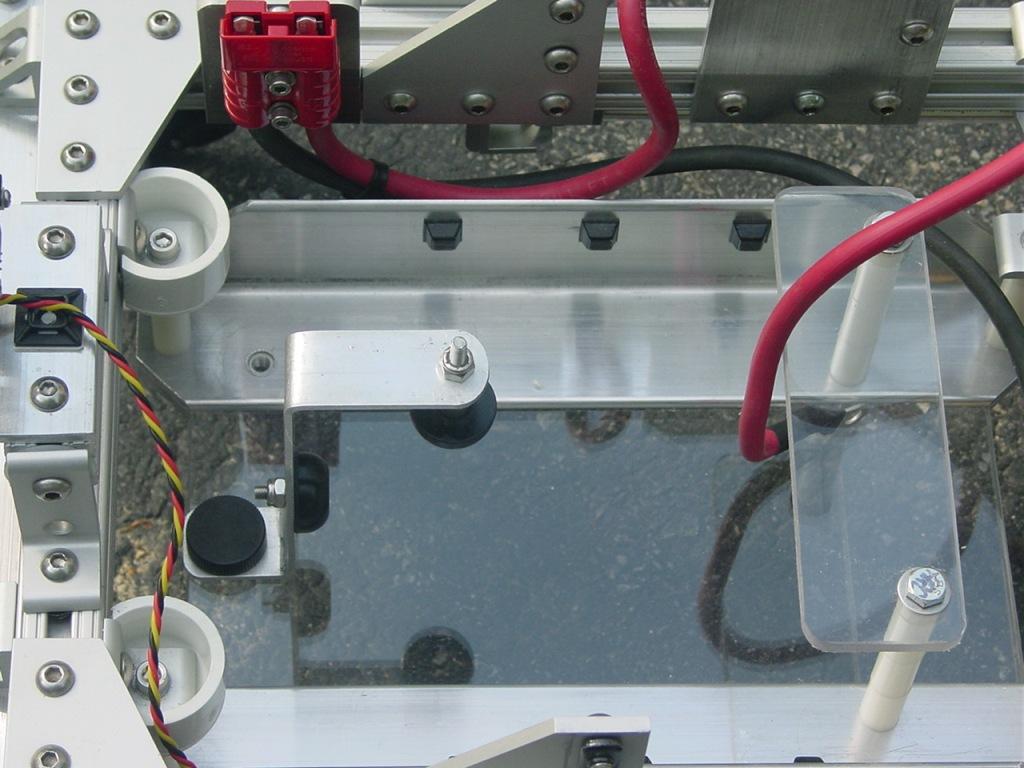
There are two common features that I consider essential when designing large-scale robots, adjustability and modularity. All of the ARMadeus robots have been built using 80/20 aluminum t-slotted extrusions and joining plates. It allows for flexibility in repositioning parts without having to drill holes. The first picture shows the lower 21" wide x 32" long lower chassis and drive train.
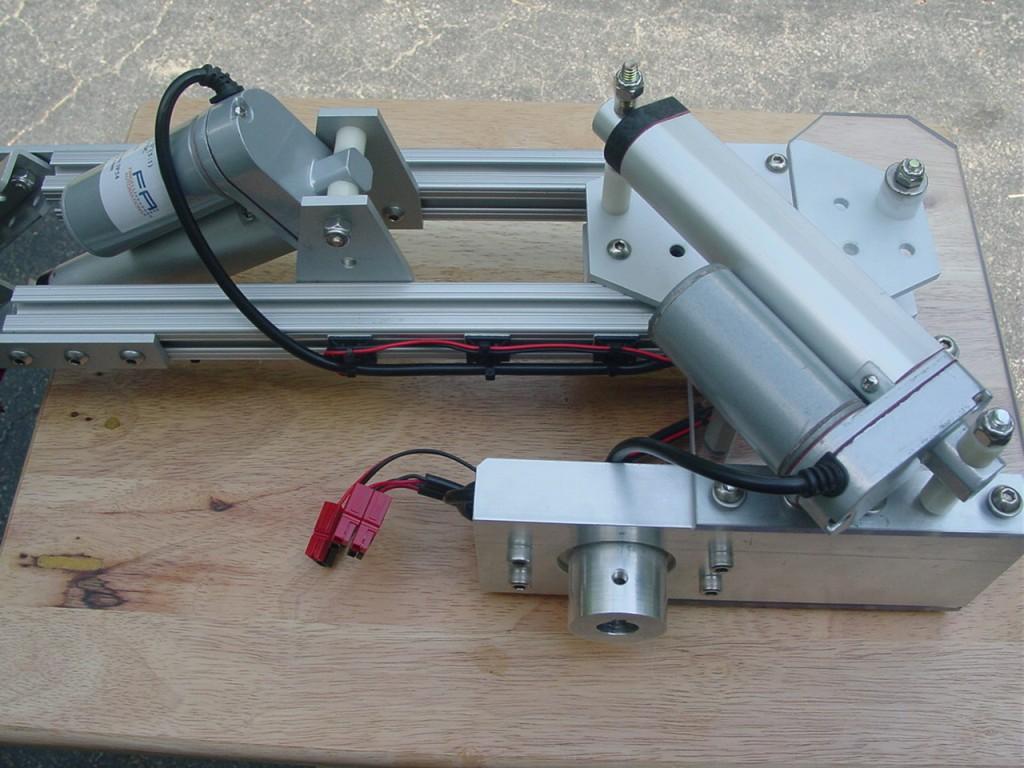
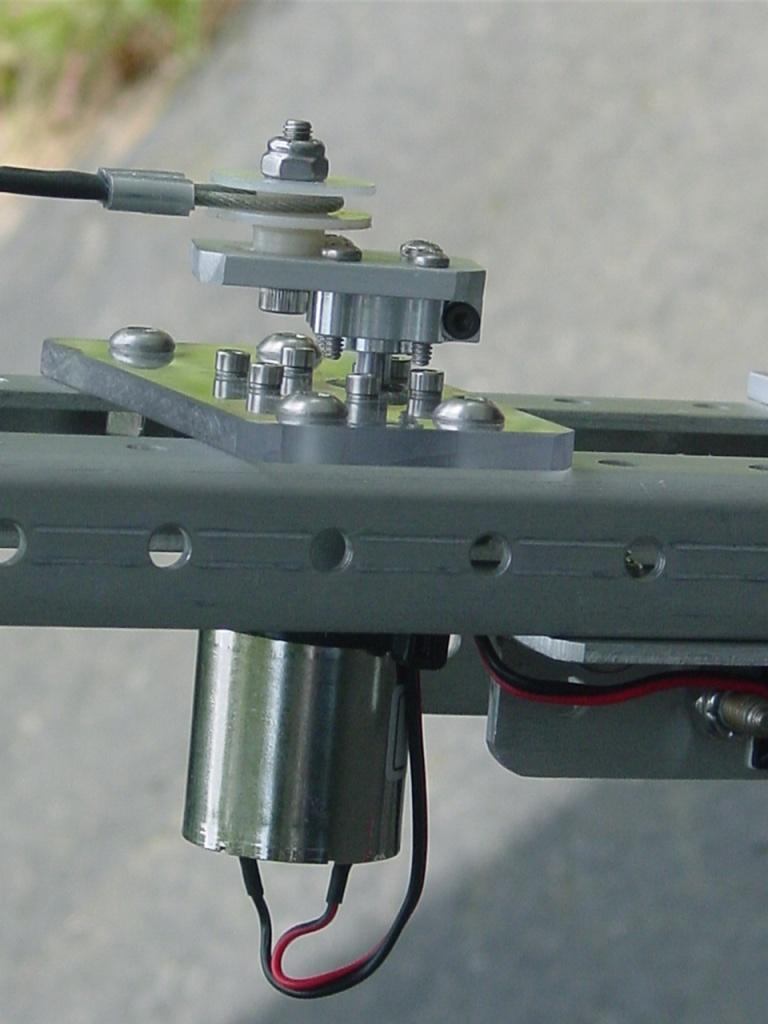
Here's a closeup of one of the drive units, consisting of an NPC 2212 12V 285 rpm gear motor and 2 AndyMark 6" HiGrip wheels.

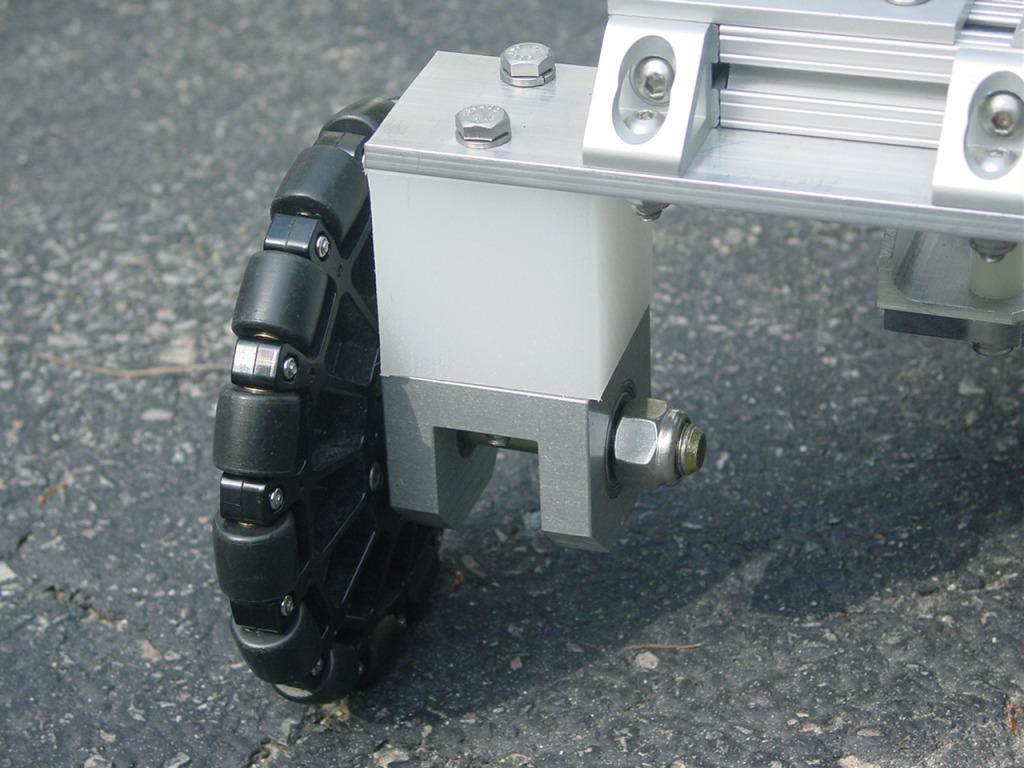
The rear wheel assembly uses an AndyMark 6" Omni wheel.
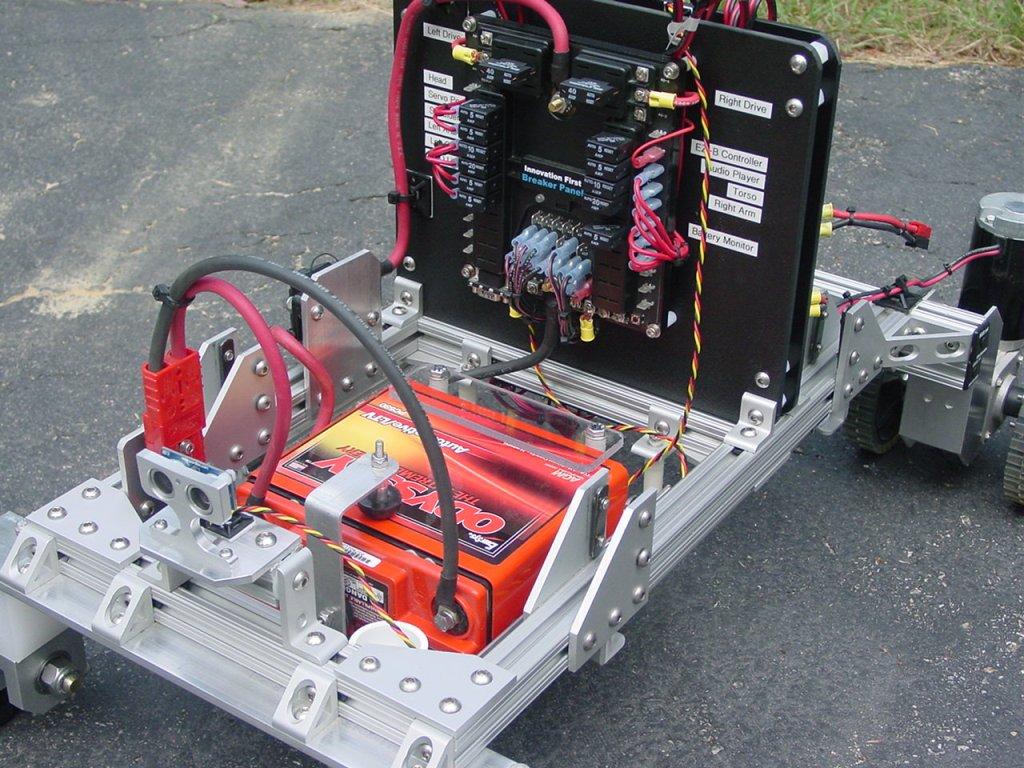
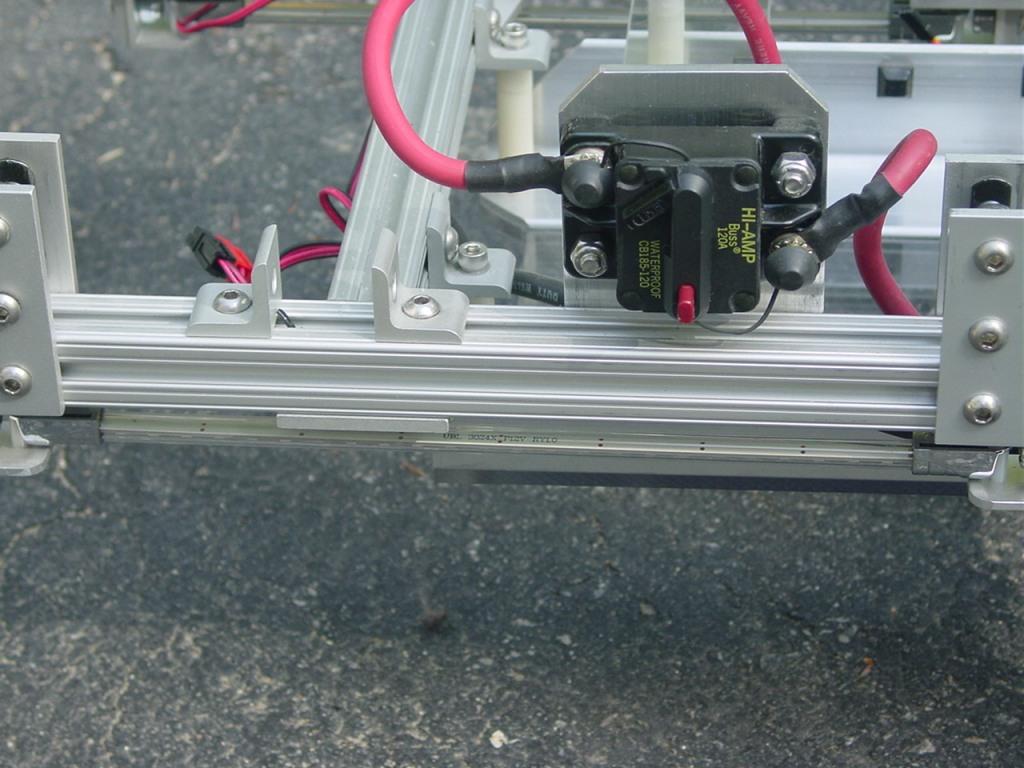
On one side of the chassis is the main power switch/120 Amp circuit breaker. A blue LED light tube for effect lighting can be seen just under the chassis rail.
The robot is powered by 12V 17AH Sealed Lead Acid battery. The 15 lb battery is mounted horizontally on a tray near the back of the robot and acts a counterweight when the robot arms and torso are fully extended.
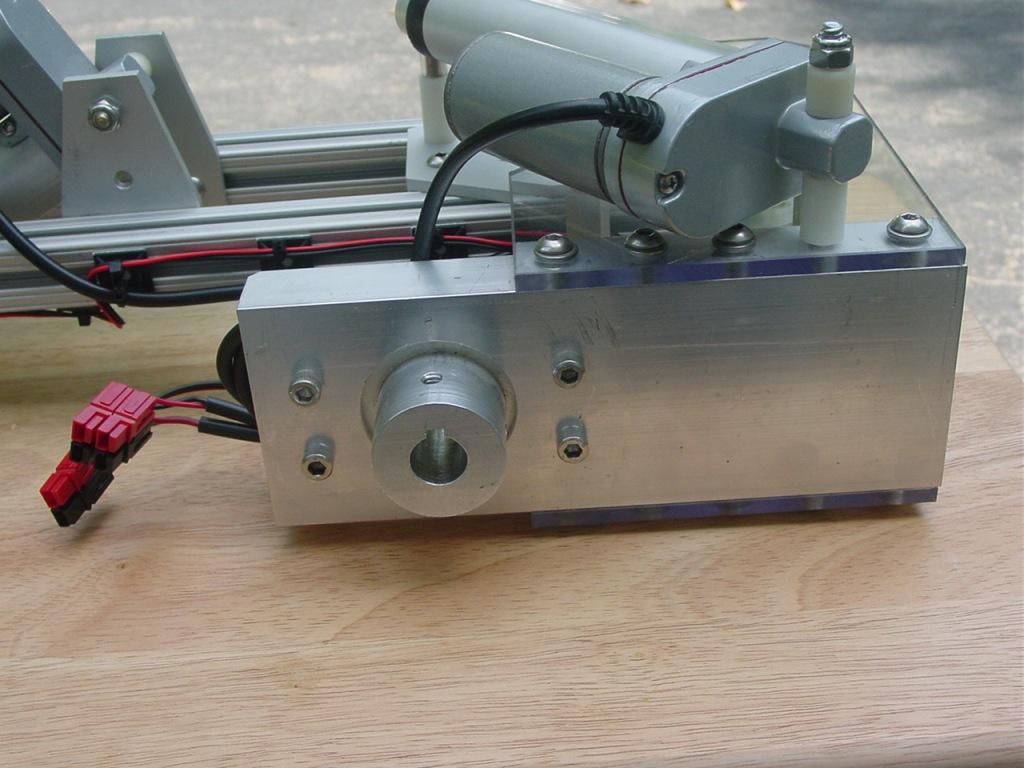
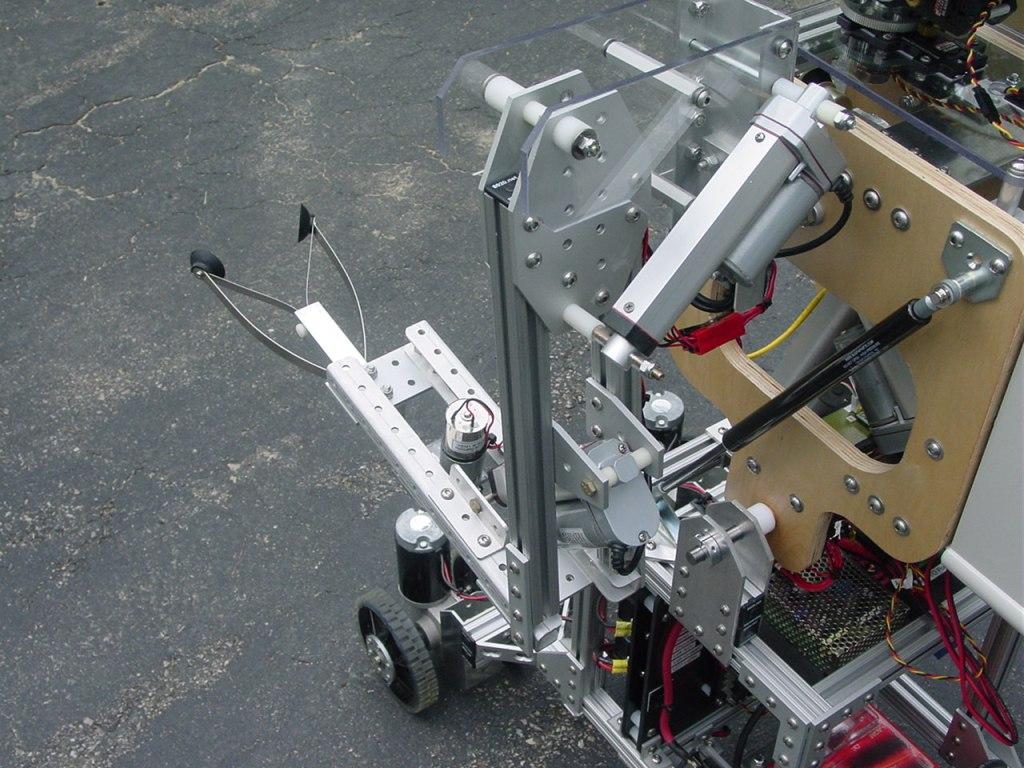
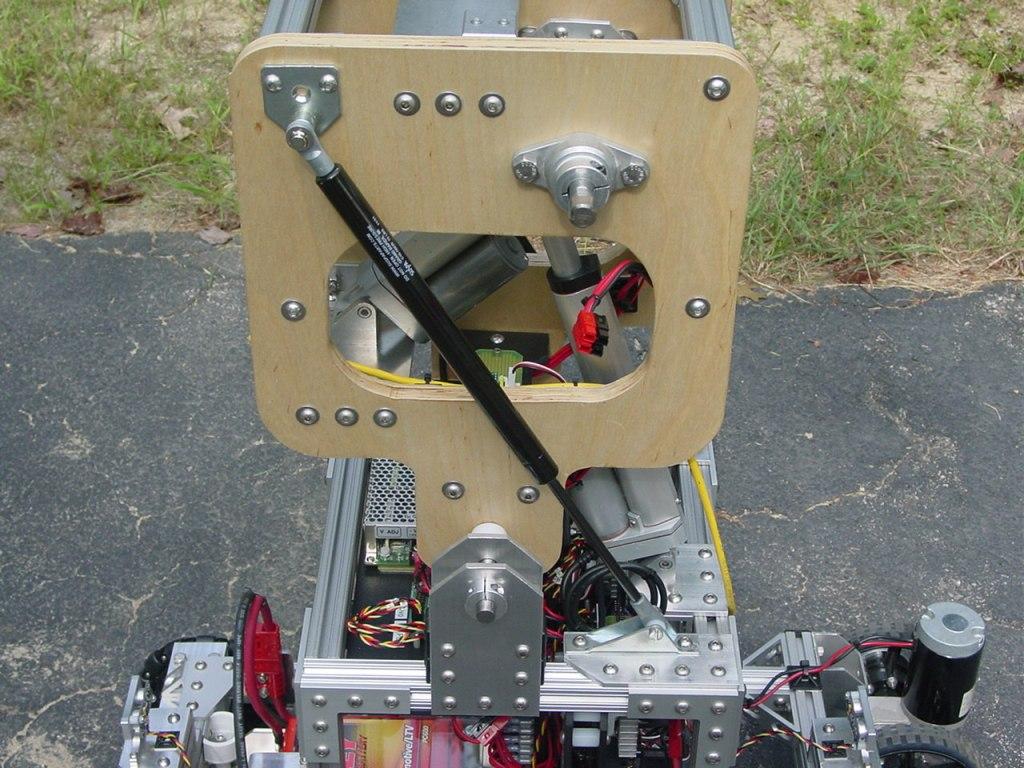
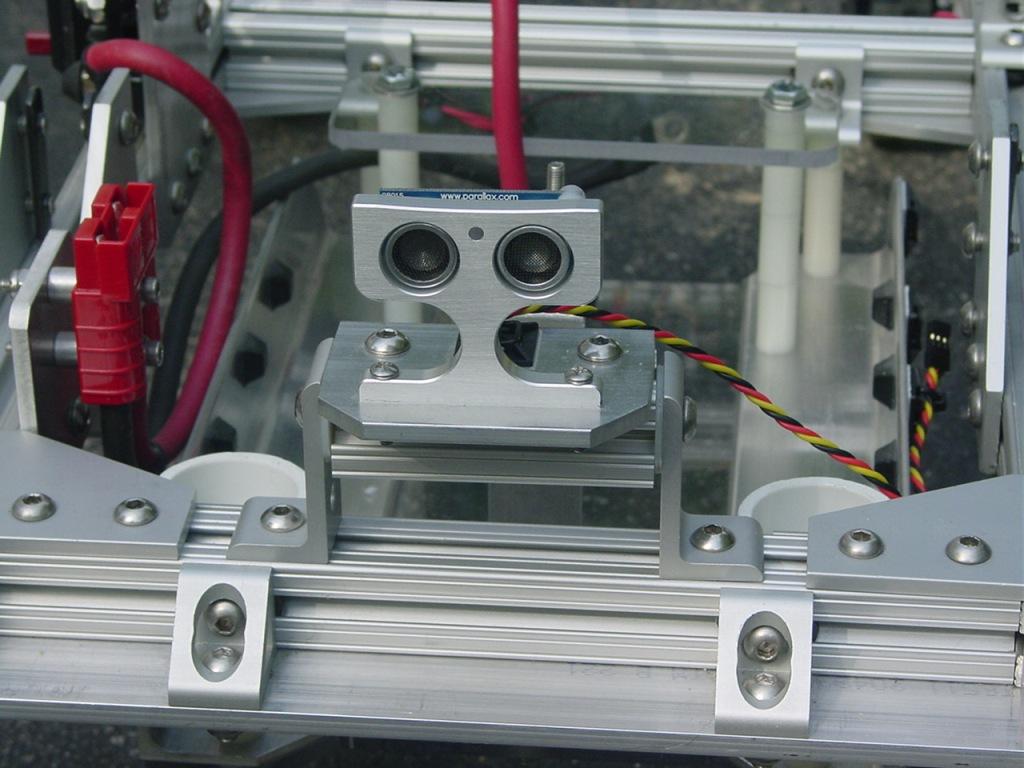
Front and rear Parallax PING sensors are mounted on tilting brackets as shown below.
I will post pictures of the remaining subsystems and the completed robot during the next few days.
Discover more robots
Nekoeccentric's Dr.Who's Nsd Dalek

Rb550f's Found An Old Freind


Do you have a list of the specs? what cpu, what mpu? that sort of stuff. Maybe what sensors.
:-)
Wow indeed!
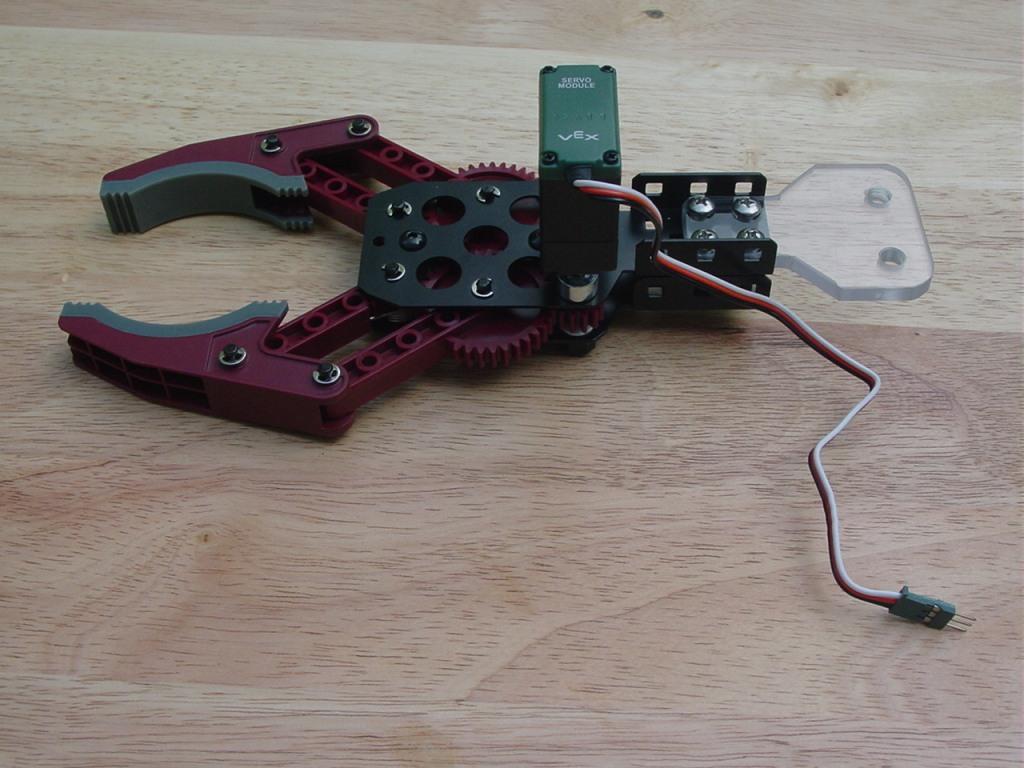
@MovieMaker What specific information would you like that isn't listed in the text? I'll be glad to share any technical details of the robot. Some of the components that I used are now obsolete but, there are functional equivalents available. Wherever possible I try to use only off the shelf parts, especially if the shelf is in my basement. If an exact part is not available, I will modify an existing one to meet my needs, such as the compliant spring gripper. Any parts that I need to fabricate have to be made with a drill press, band saw and hand tools. With the exception of the arm hubs there are no custom precision made parts on my robot. A machinist friend made the arm hubs for me years ago for another project. They were too good to not use. But I could have purchased a similar 5/8" finished bore hub from AndyMark if I needed to.
Sensors: (2) Parallax PING))) Ultrasonic Distance Sensors w/ Protector Stands (1) Dimension Engineering DE-ACCM6G2 Accelerometer
CPU: (1) EZ-B controller with XBee-PRO RF Module and Parallax XBee SIP Adapter (#32402)
Audio: (1) EFX-TEK AP-16+ Audio Player
Video: (1) Sony MV-3310 Color Video Camera with Fujinon YV2.7X2.9LA-SA2 Lens (1) Xavien X-QVC-EM Quad Video Controller Engineering Module (...to be used for future expansion)
Motor Control: (2) Sabertooth 2 x 12 Motor Controllers (4) Innovation First 12V Victor 883 Speed Controllers (...Discontinued model) (2) Innovation First Spike Relay Modules
Power: (1) Odyssey PC680MJ 12V 17AH Battery
(1) Innovation First Breaker Panel (...Discontinued model) (1) Mean Well SD-25A-5 5V/5A DC-DC Converter (...for servo power) (1) Datel Digital Voltage Monitor, DMS-20PC-0-DCM-B-C, (...for real time battery monitor)
Hi,
I've been on holiday and guess what... I come back and immediately check out the community and find a very impressive robot, unlikely to what we've seen here before. Congratulations Jim ! A fine piece of engineering. This is what I call a real robot ! I hope you post some videos soon.
Greetz,
PhG
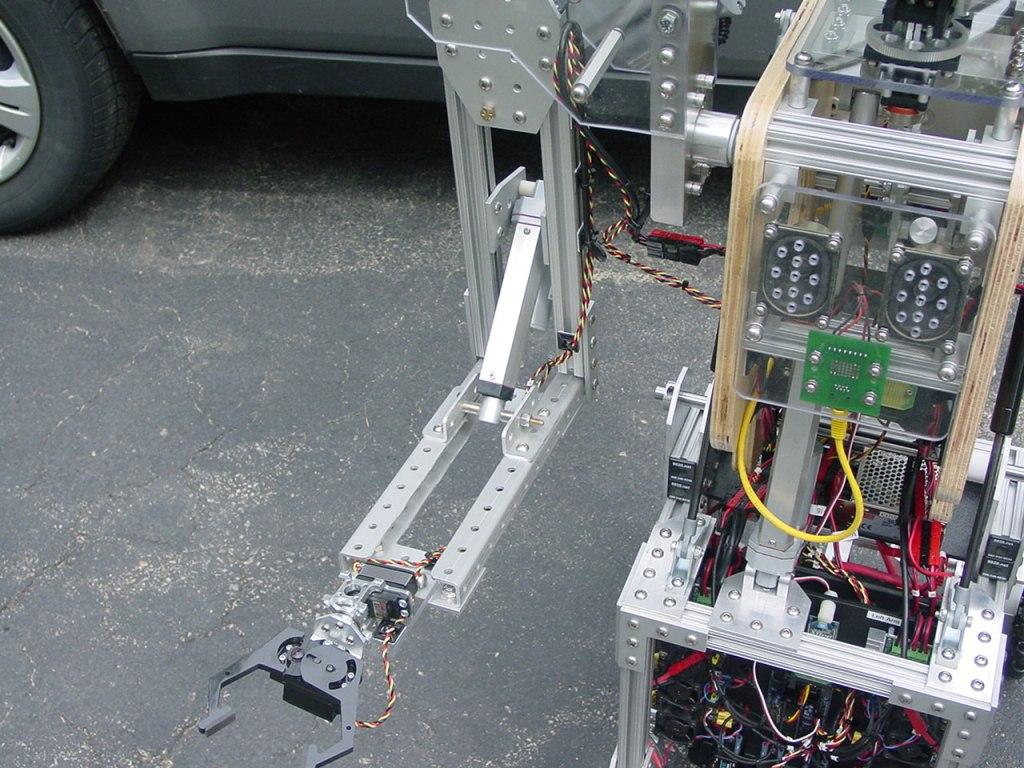
Very impressive and inspiring. My build desires do tend toward squat tank styles, but this is giving me ideas. I love how you used that suction cup spring gripper... I now have to steal my mom's away from her and hack it
Hi Jim, Very impressive robot. What range and quality do you get out of the video transmitter?
Your robot is awesome, amazing quality construction. I can not see your pictures again and again!
@rgordon My video transmitter is close to 15 years old but has worked well with both b&w and color cameras. The resolution is more a function of the camera. I have never tried anything more than a couple of hundred feet in range.