


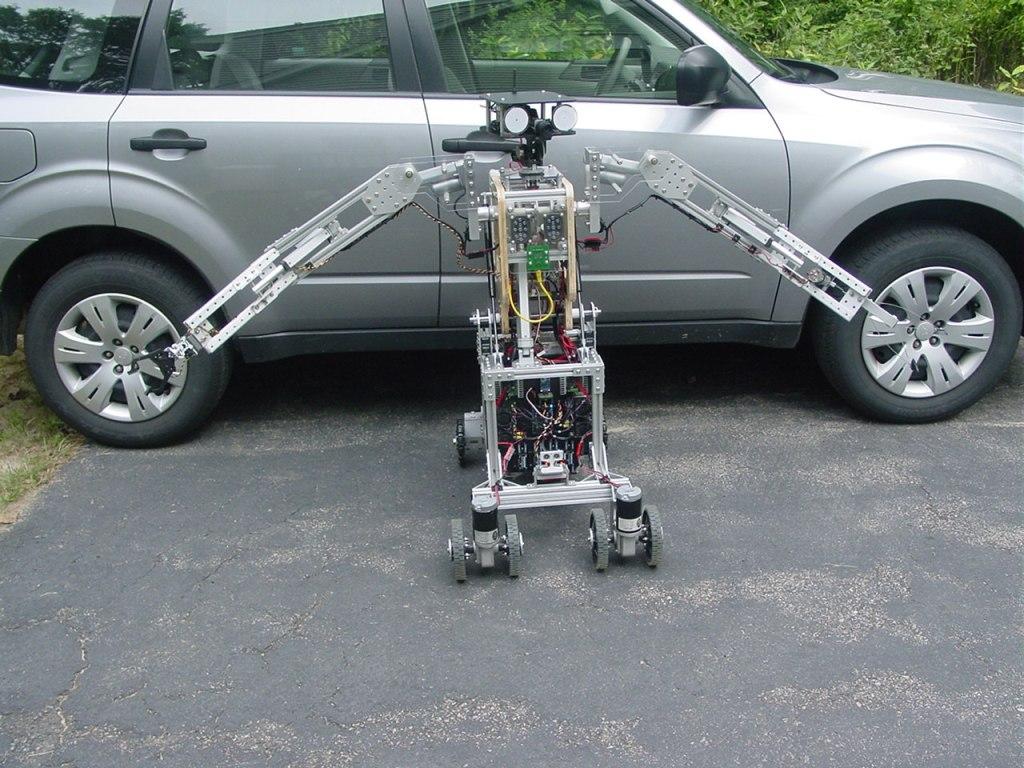
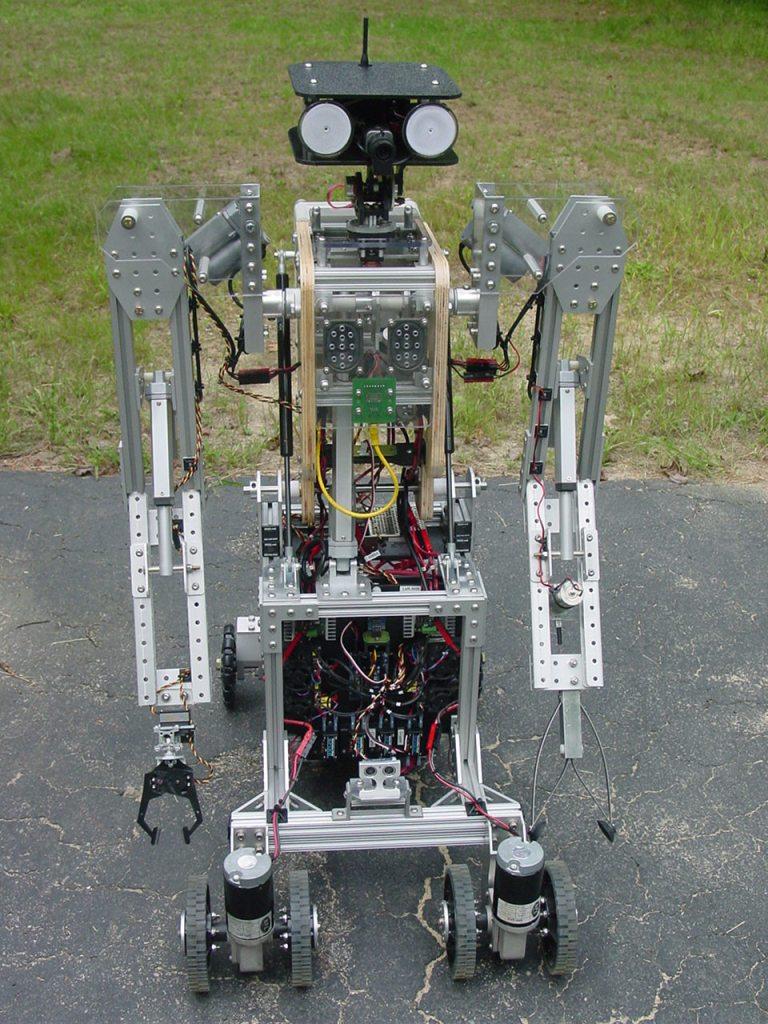









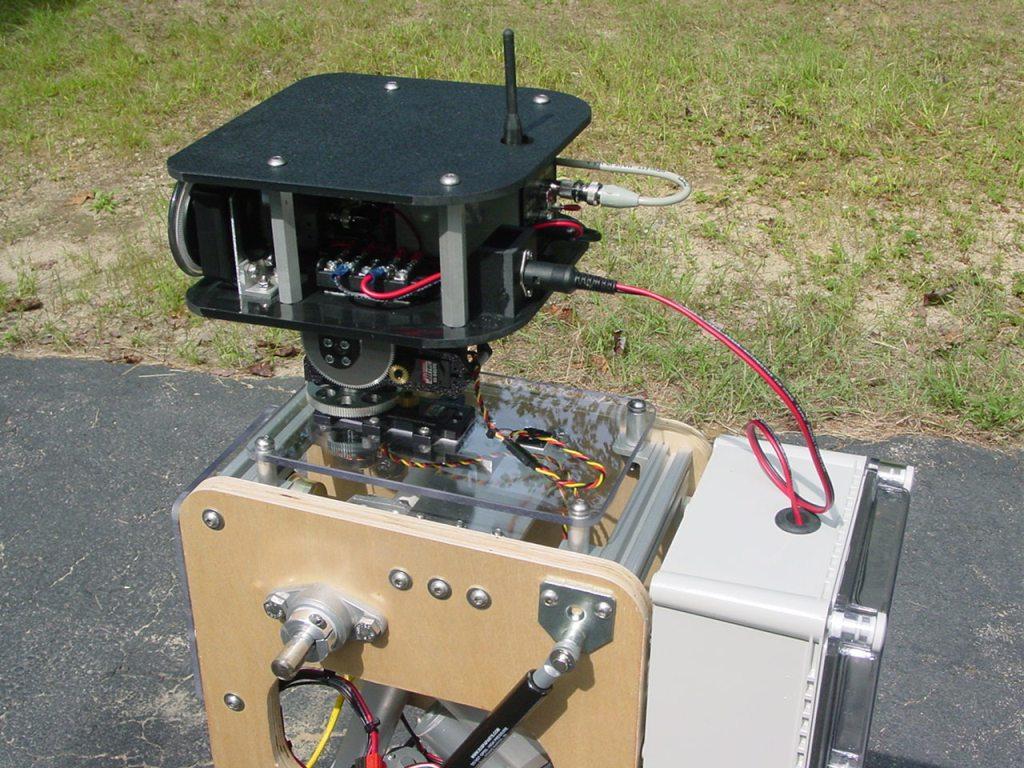
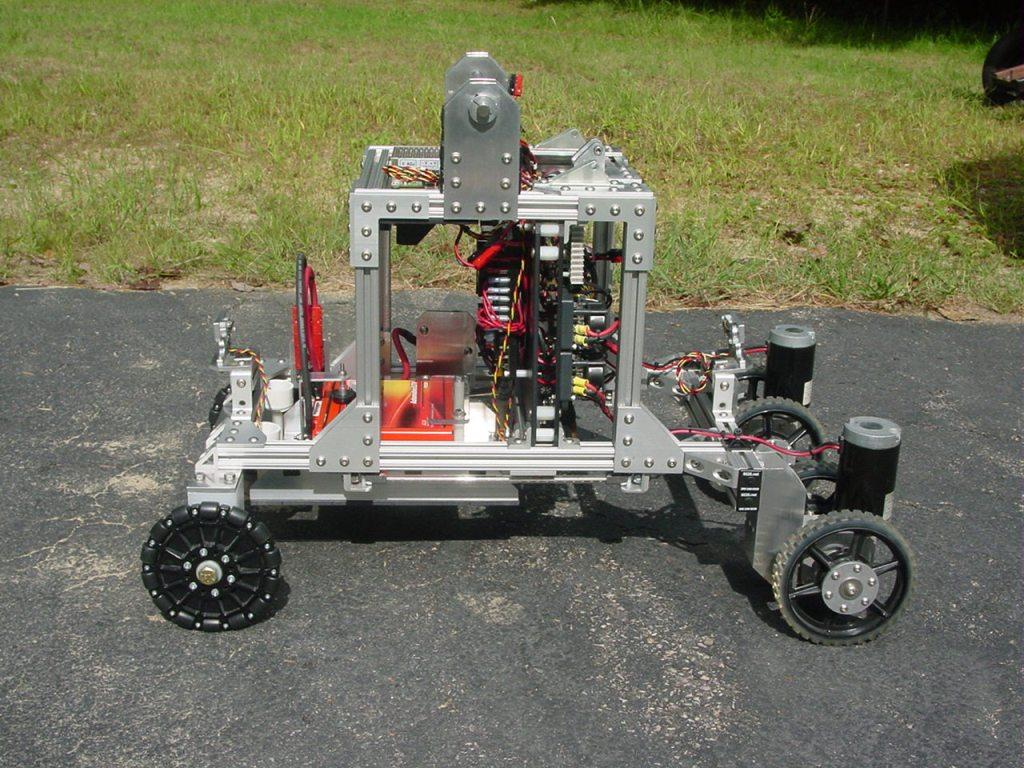
For the last decade or more I've been working on a series of large robots with articulated arms. I just finished the latest version, ARMadeus Mk7. Considered mid-size compared to some of its descendents, it measures 48" tall and weighs 112 pounds. Some of the main components include:
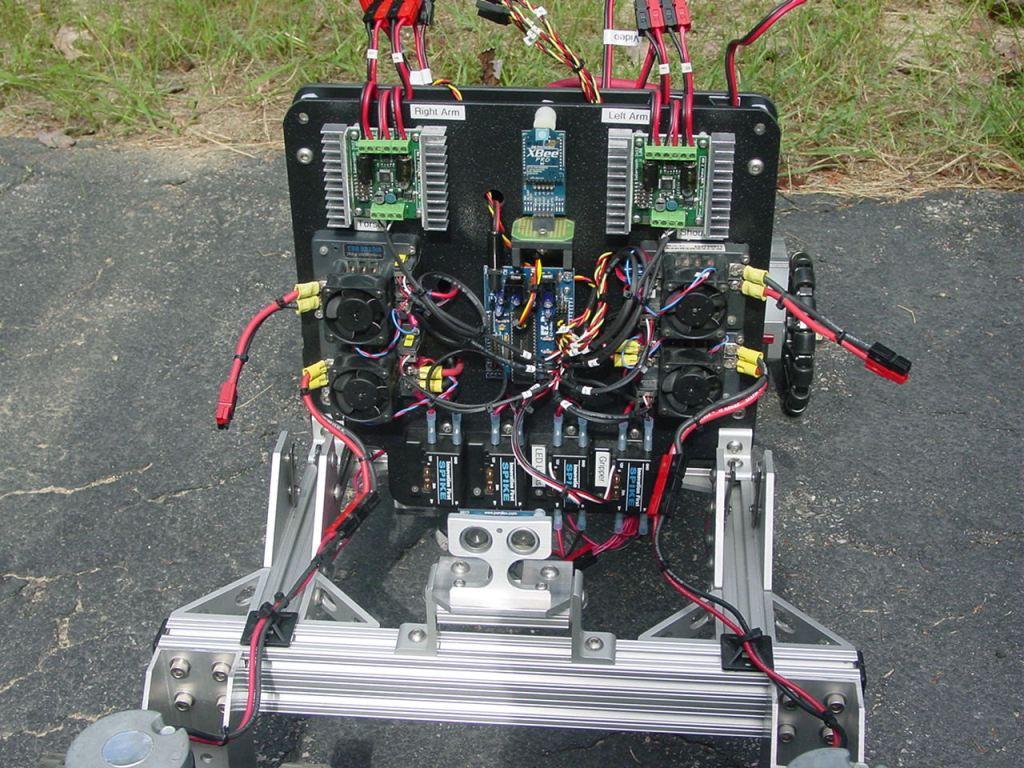
(3) 12V DC gear motors (4) Servos (6) 12V linear actuators (4) IFI Victor 12V speed controllers (2) Sabertooth 2x12 speed controllers (2) IFI Spike H-Bridge relay modules (1) Audio player (1) video camera w/ 2.4GHz transmitter
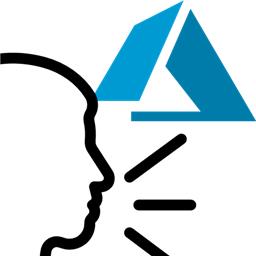
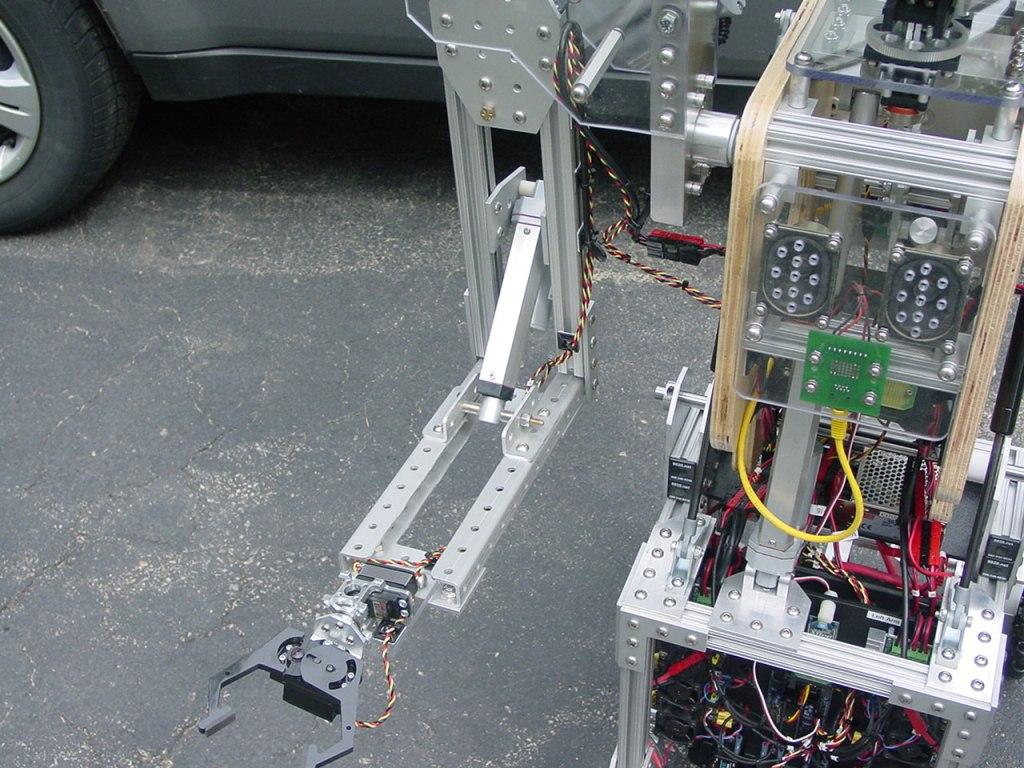
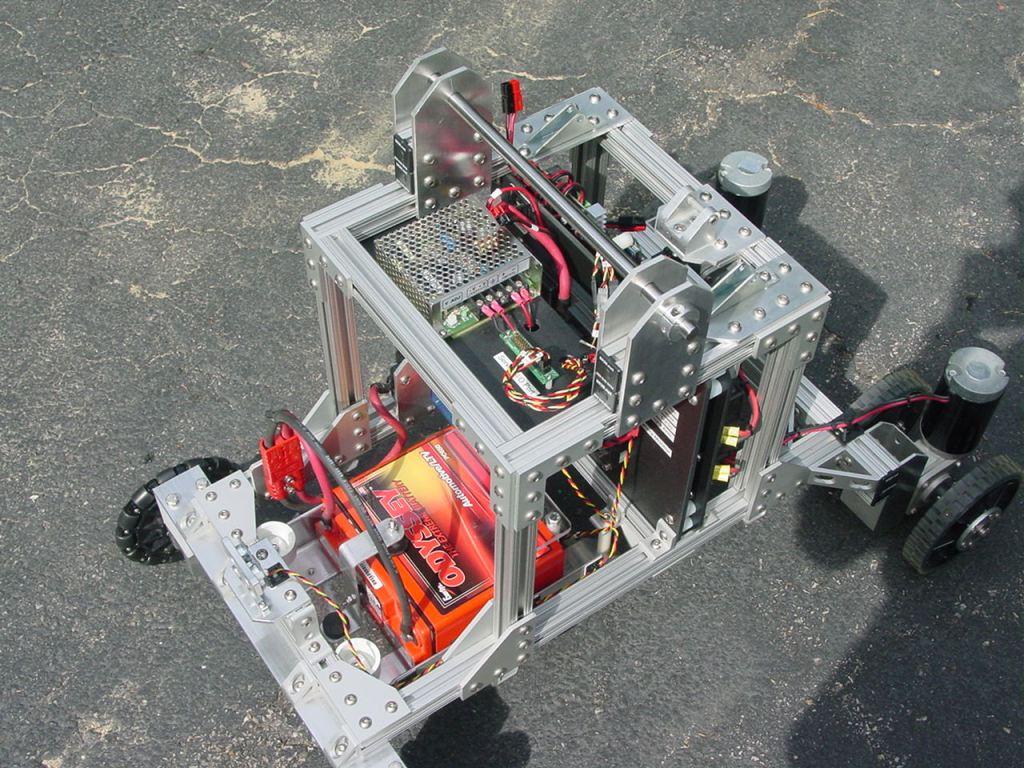
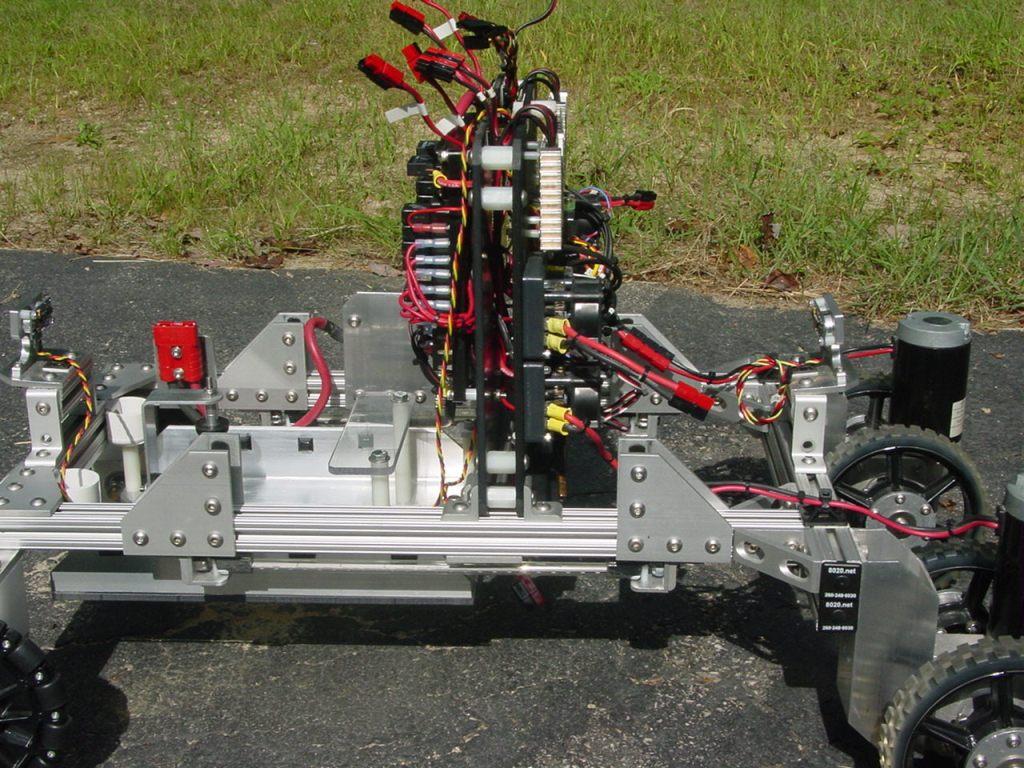
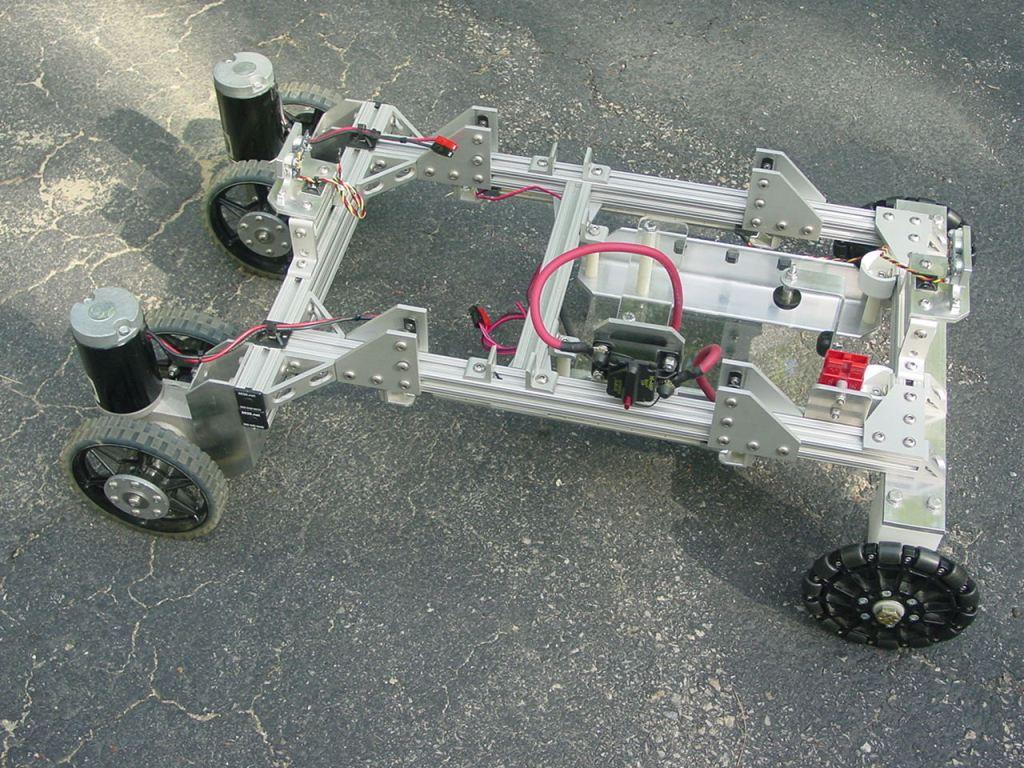
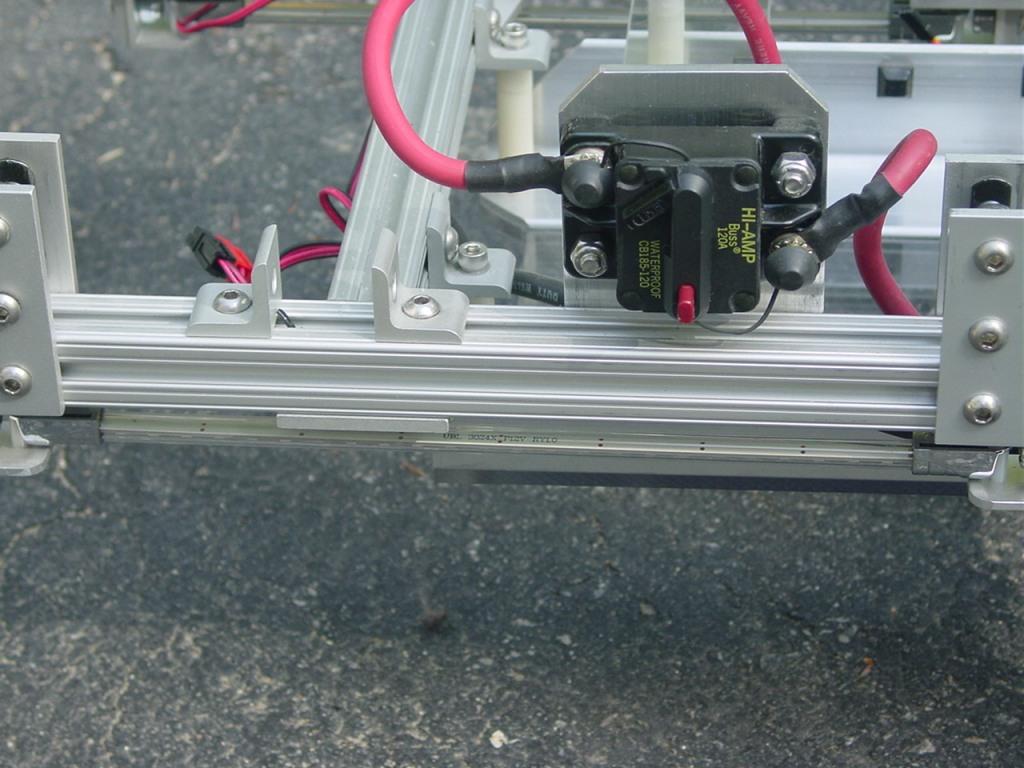
There are two common features that I consider essential when designing large-scale robots, adjustability and modularity. All of the ARMadeus robots have been built using 80/20 aluminum t-slotted extrusions and joining plates. It allows for flexibility in repositioning parts without having to drill holes. The first picture shows the lower 21" wide x 32" long lower chassis and drive train.
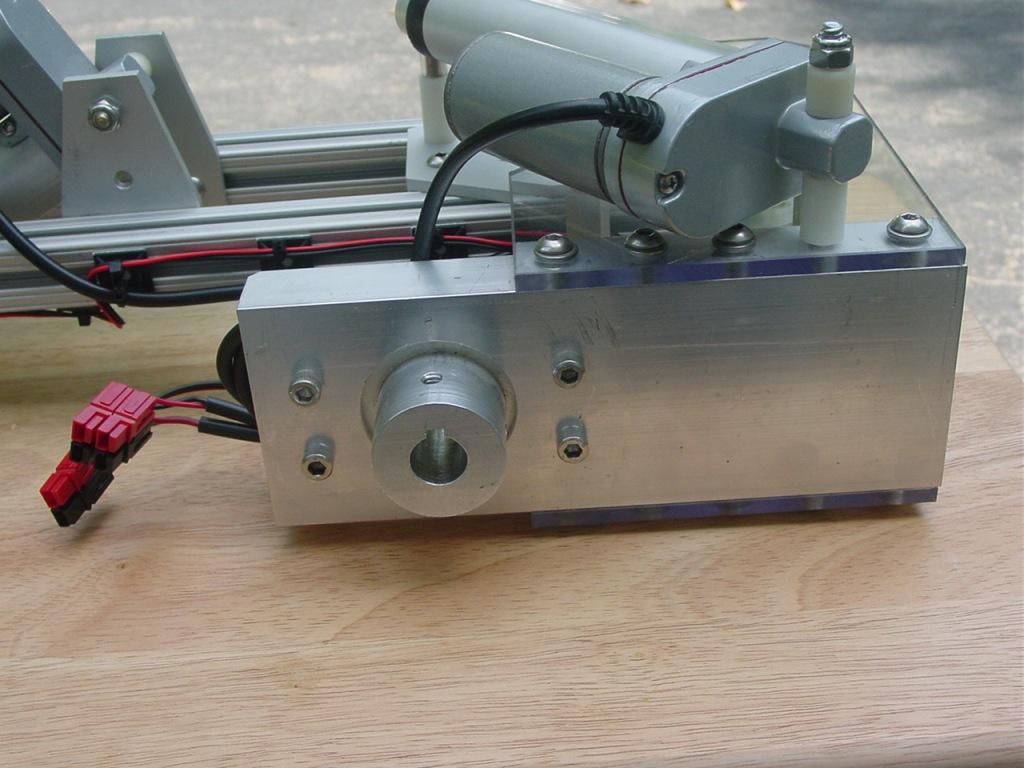
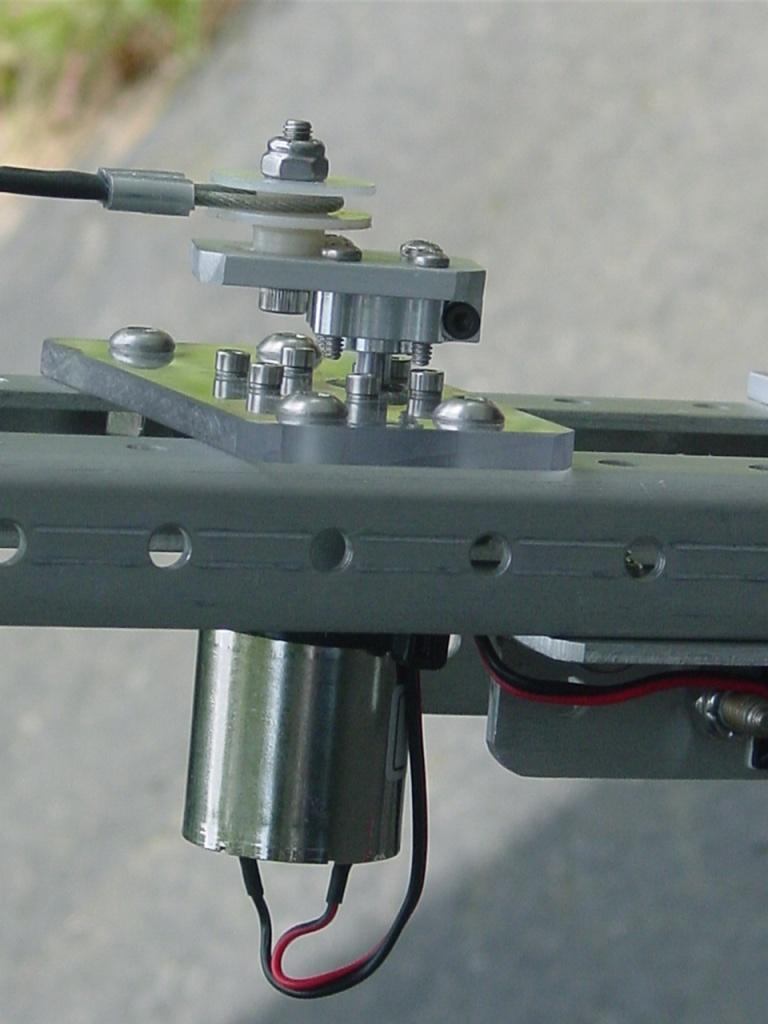
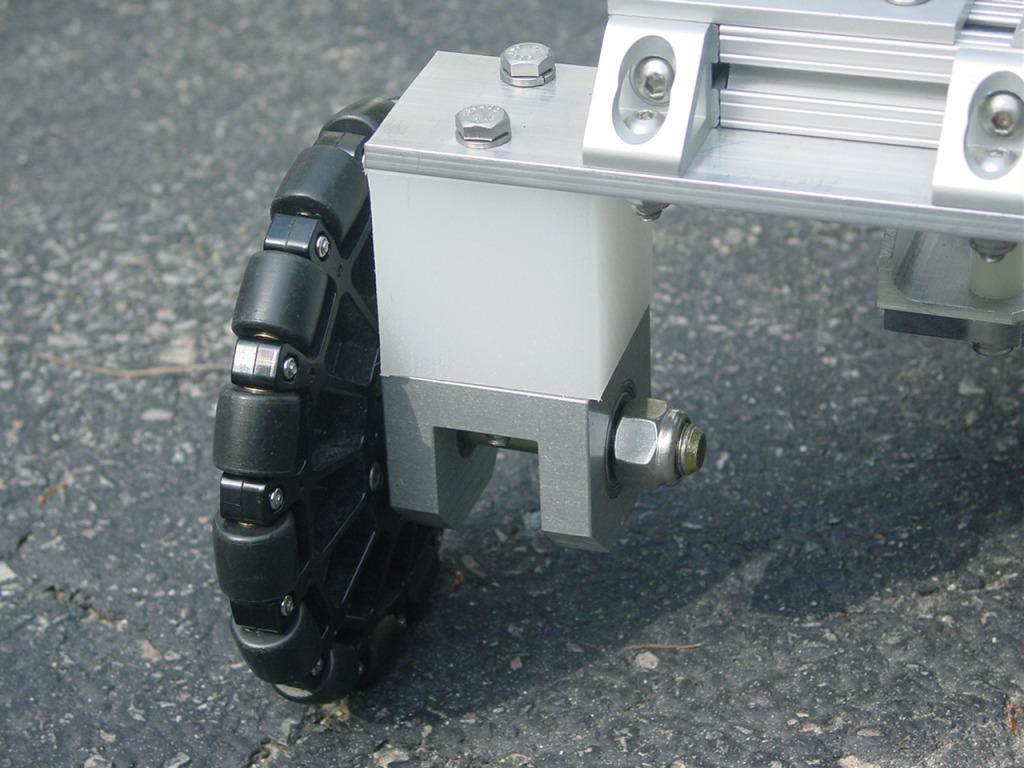
Here's a closeup of one of the drive units, consisting of an NPC 2212 12V 285 rpm gear motor and 2 AndyMark 6" HiGrip wheels.

The rear wheel assembly uses an AndyMark 6" Omni wheel.
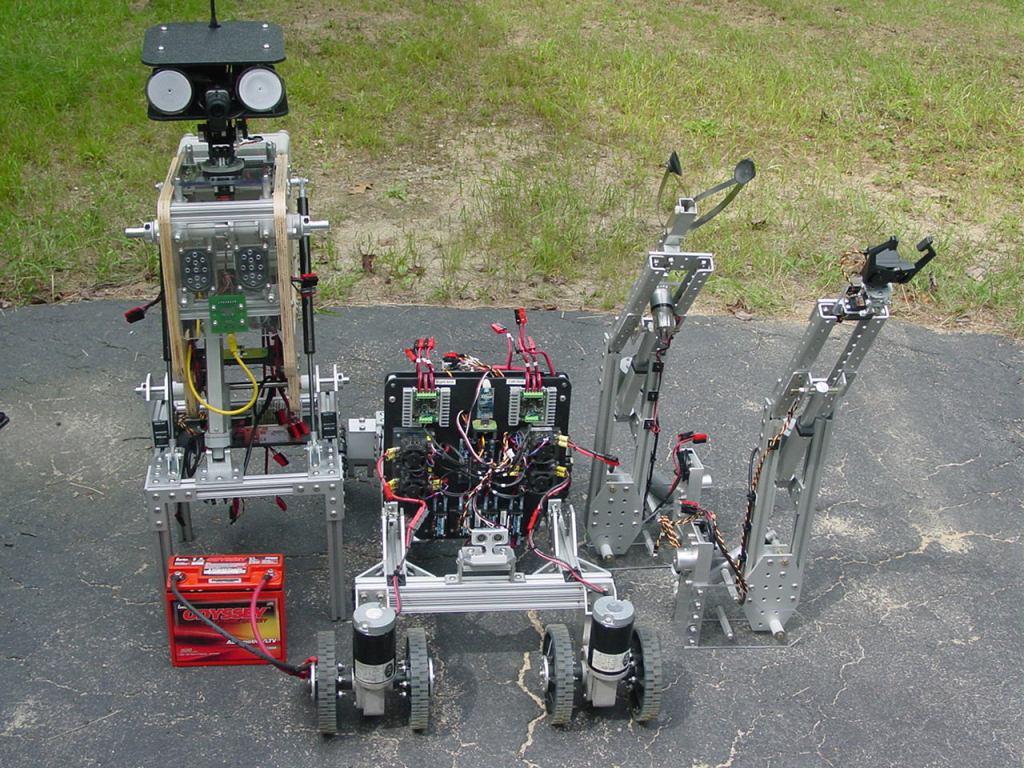
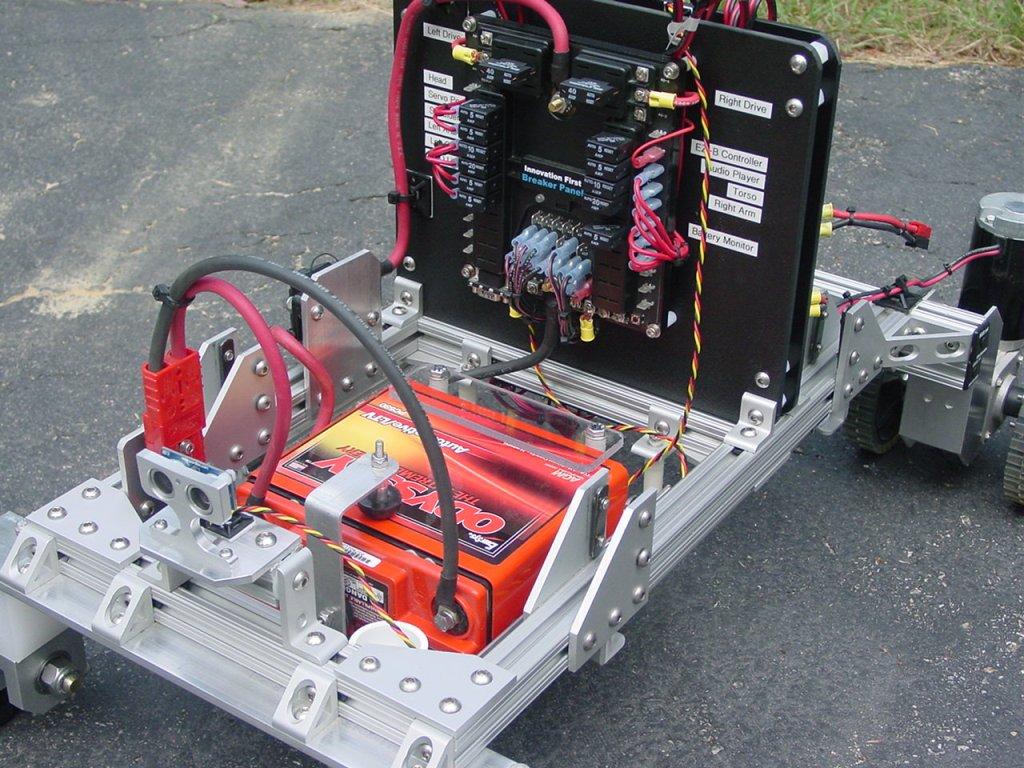
On one side of the chassis is the main power switch/120 Amp circuit breaker. A blue LED light tube for effect lighting can be seen just under the chassis rail.
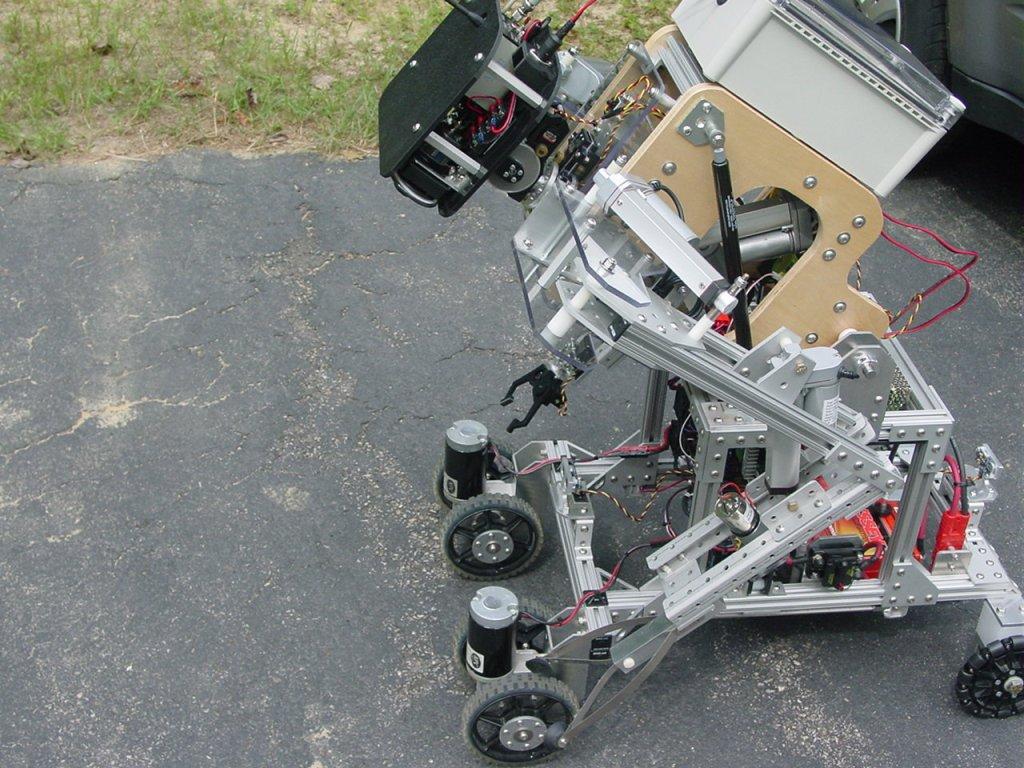
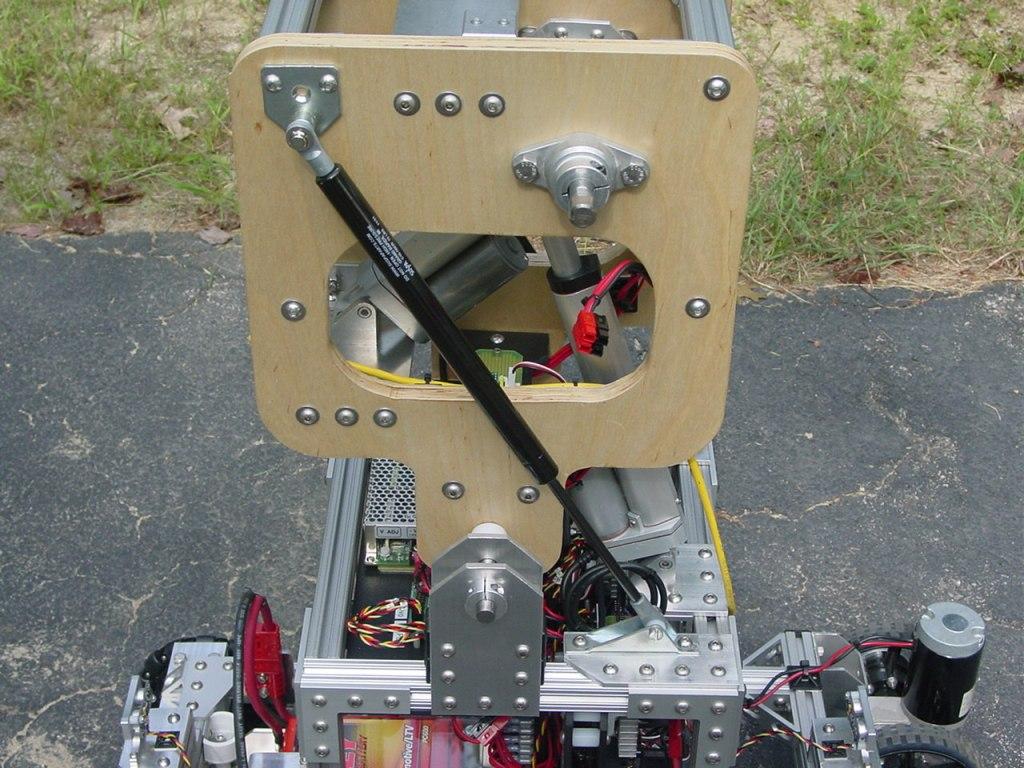
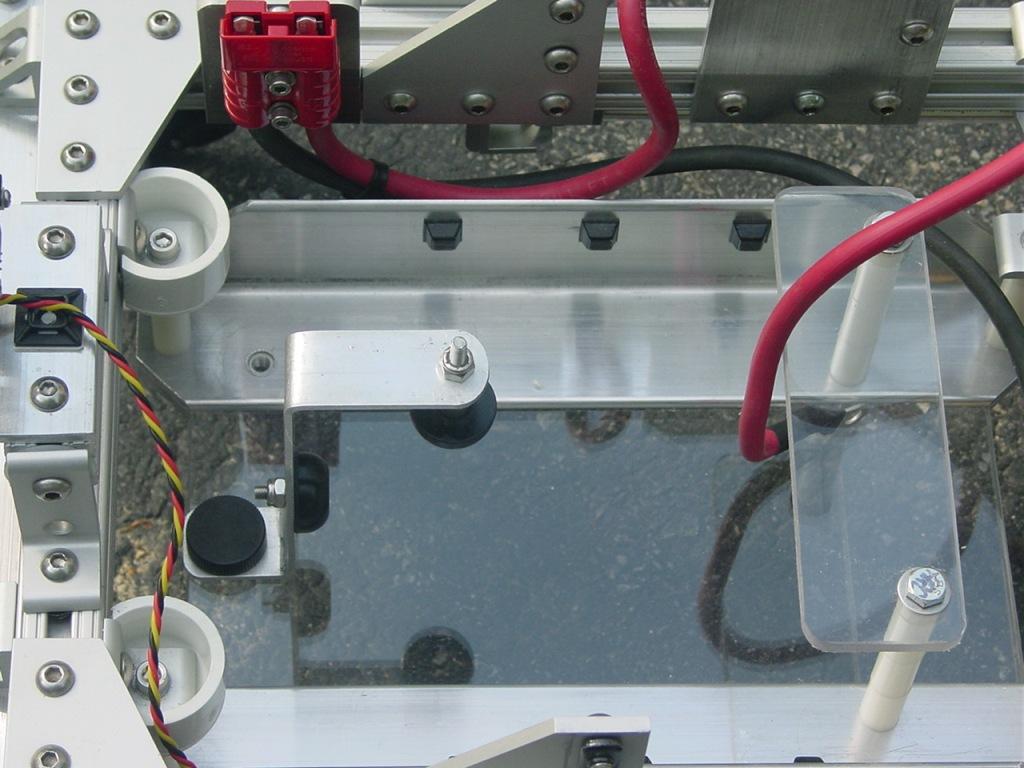
The robot is powered by 12V 17AH Sealed Lead Acid battery. The 15 lb battery is mounted horizontally on a tray near the back of the robot and acts a counterweight when the robot arms and torso are fully extended.
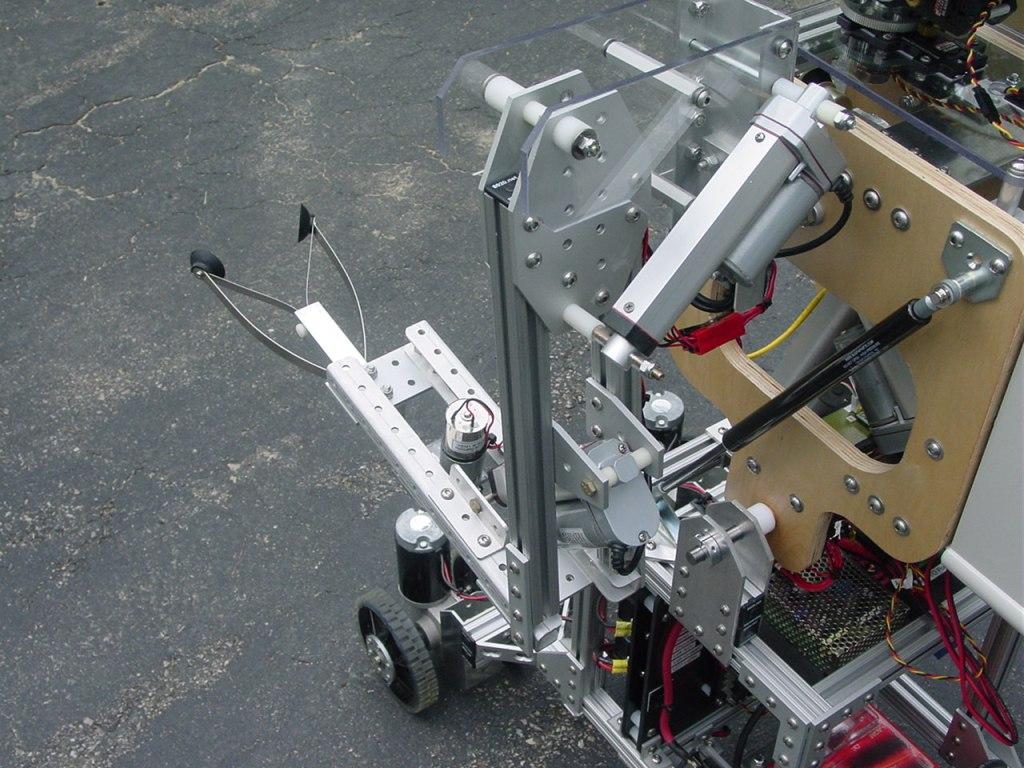
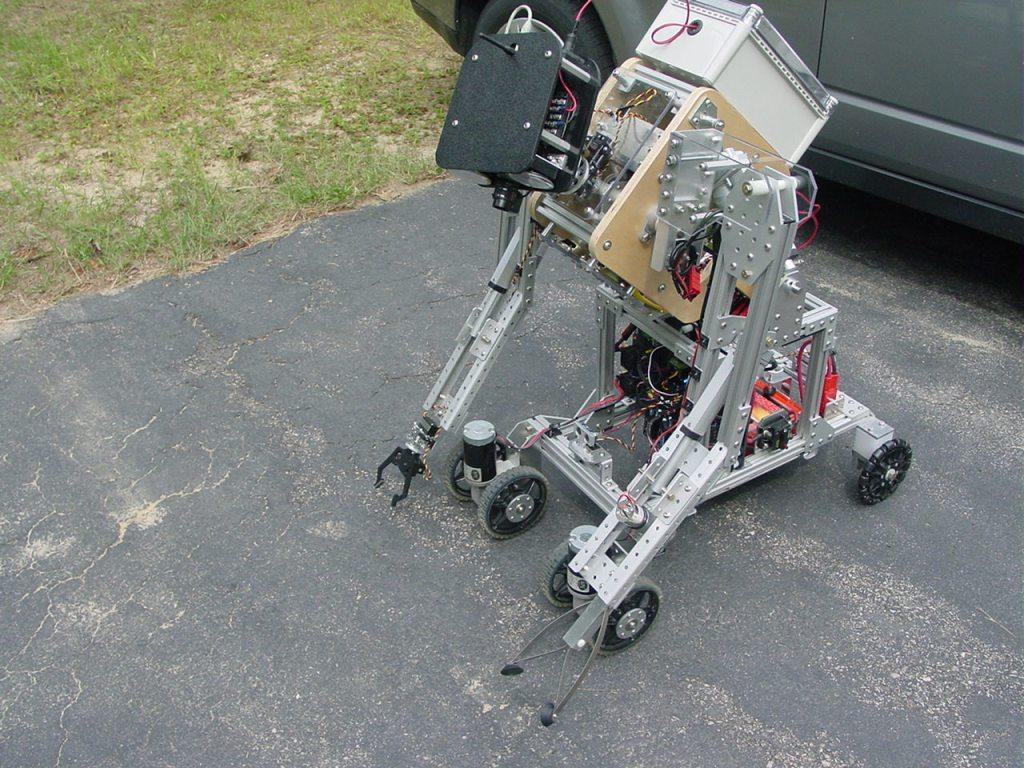
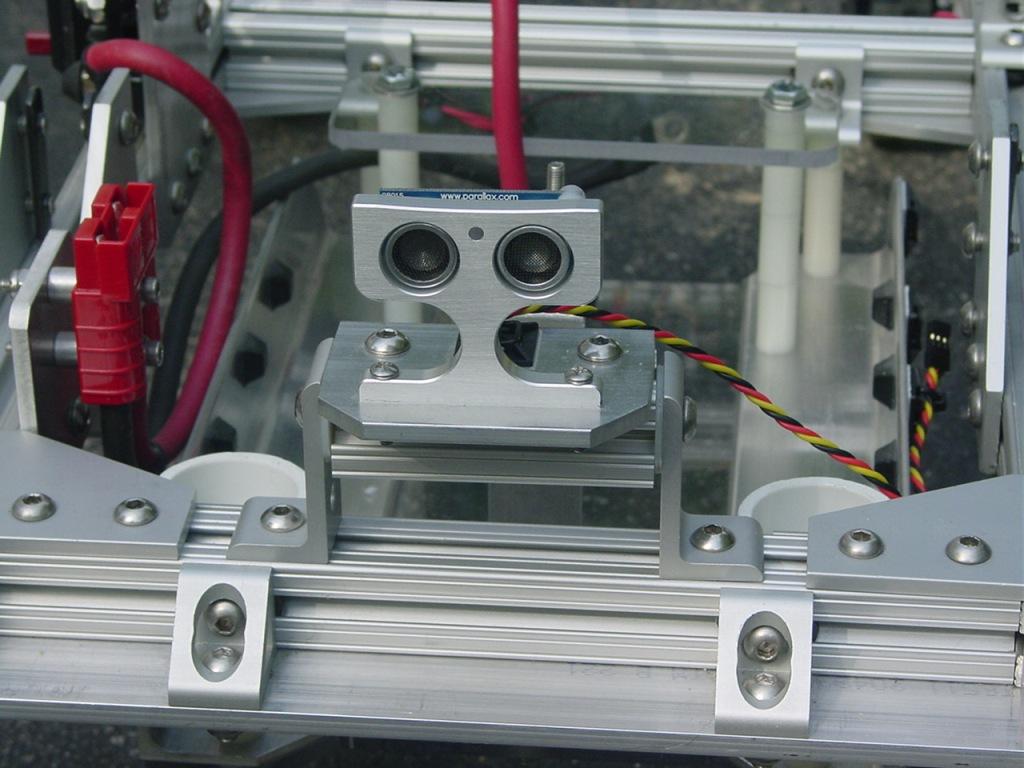
Front and rear Parallax PING sensors are mounted on tilting brackets as shown below.
I will post pictures of the remaining subsystems and the completed robot during the next few days.
Discover more robots

Itsmeintorre's 3D Printed Adventurebot

Fxrtst's Mecha Morphix Robot Platform


Hello, I wanted to know how you did to connect the module xbee on controller ez-b. And on computer ? How to program ?
Kalinox,
Replacing the Bluetooth with an XBee Pro was relatively simple. On the EZ_B side I used a Parallax XBee SIP Adapter (#32402) with one of the XBee Pro modules. I made a simple 4 conductor cable for interfacing the SIP adapter to the Bluetooth module connector on the EZ-B board. The Parallax Adapter can handle the extra power required when using the 60mW XBee pro modules.
Connect V+ on the EZ-B to the +5V pin of the SIP adapter Connect Gnd on the EZ-B to the GND of the SIP adapter Connect Tx on the EZ-B to the DOUT pin of the SIP adapter Connect Rx on the EZ-B to the DIN pin of the Sip adapter
On the PC side (Windows 7) I used a Sparkfun XBee USB Explorer board with the other XBee Pro module. The Sparkfun site has links for the USB drivers and the X-CTU Configuration & Test Utility Software from Digi. Install the USB drivers first, then run the X-CTU software. I followed the instructions in the X-CTU user guide and things went smoothly. If you change any of the default parameters you need to make identical changes to both modules, with one module at a time connected to the PC side. I did change one of the ID parameters. The documentation from Digi is excellent.
The only problem I had with the XBee setup was when I needed to update the EZ-B firmware from V15 to V16. I had to temporarily reinstall the Bluetooth module to update the firmware, then replace the Bluetooth with the XBee and reconnect. I also had to change the channel on my 2.4GHz video transmitter to the highest frequency to avoid interference with the XBee.
Good luck with the conversion.
Jim
Thanks for the explication :-) I see things more clearly. Can you recommend me a xbee pro module particularly ?
Kalinox,
I'm using the 60mW XBee Pro with the chip antenna at the EZ-B end on my robot and a 60mW XBee Pro with a wire antenna on the PC side. I have not tried any other module configurations. This combination works well for me.
Jim
@Jim Milan
What range do you get with the XBee? Thanks.
@rgordon
I haven't really tested the range anywhere near the theoretical limit. So far it has worked fine over a distance of several hundred feet with the PC indoors and the robot outside.
Jim
motors you are using look like ones i bought for full size R2-D2 using ,i know they take a lot of power\
NICE job on your design too