

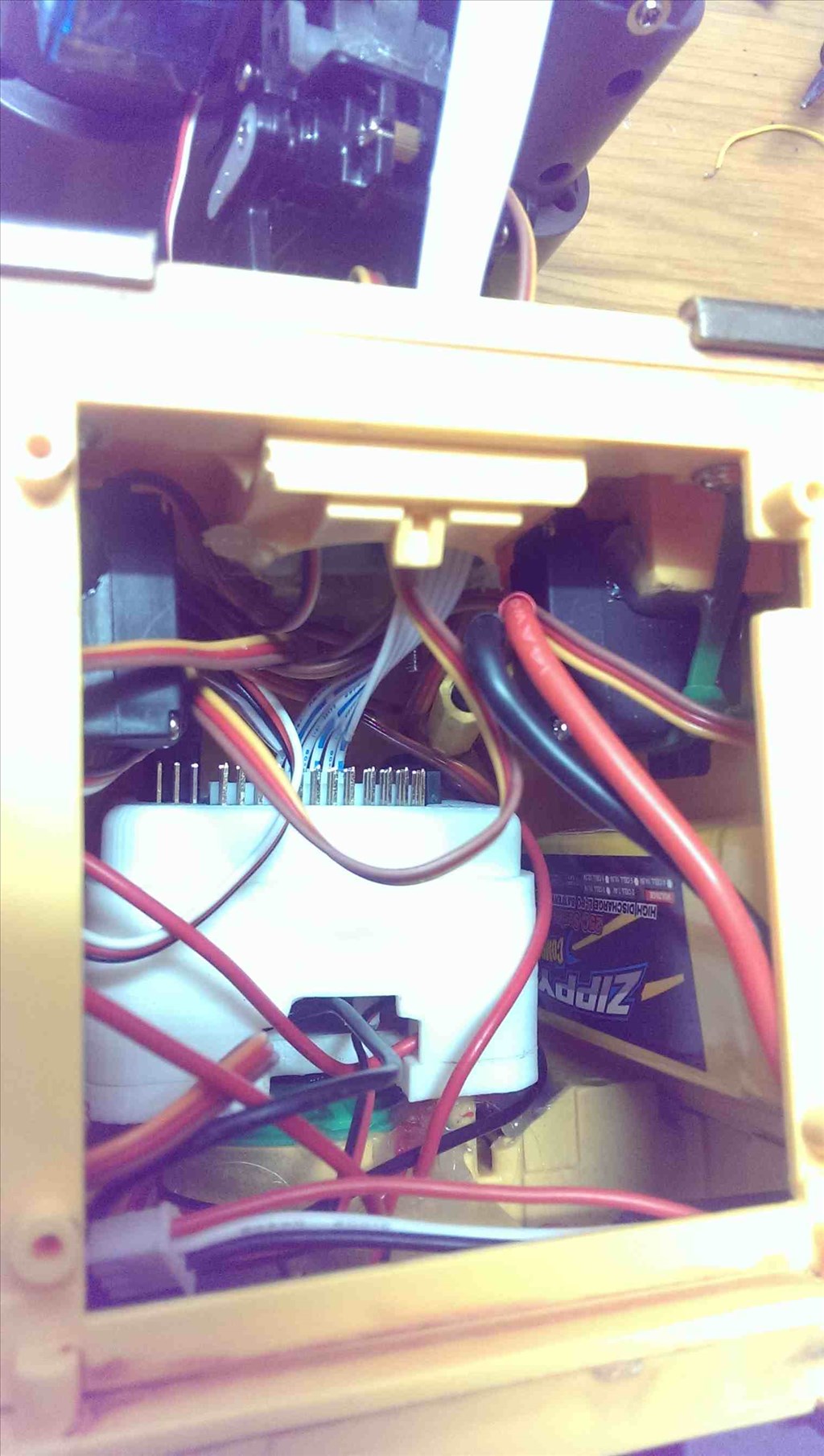
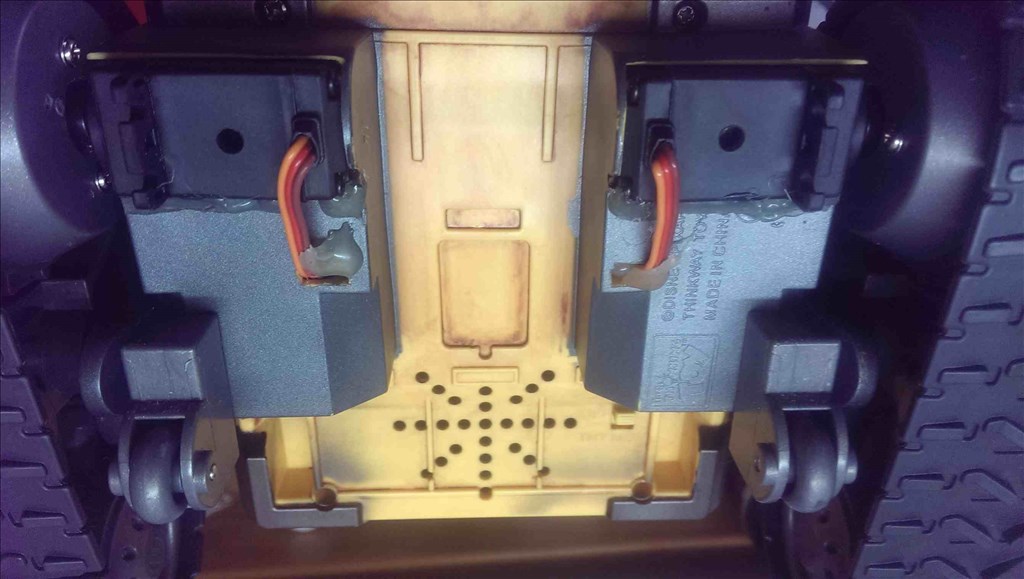
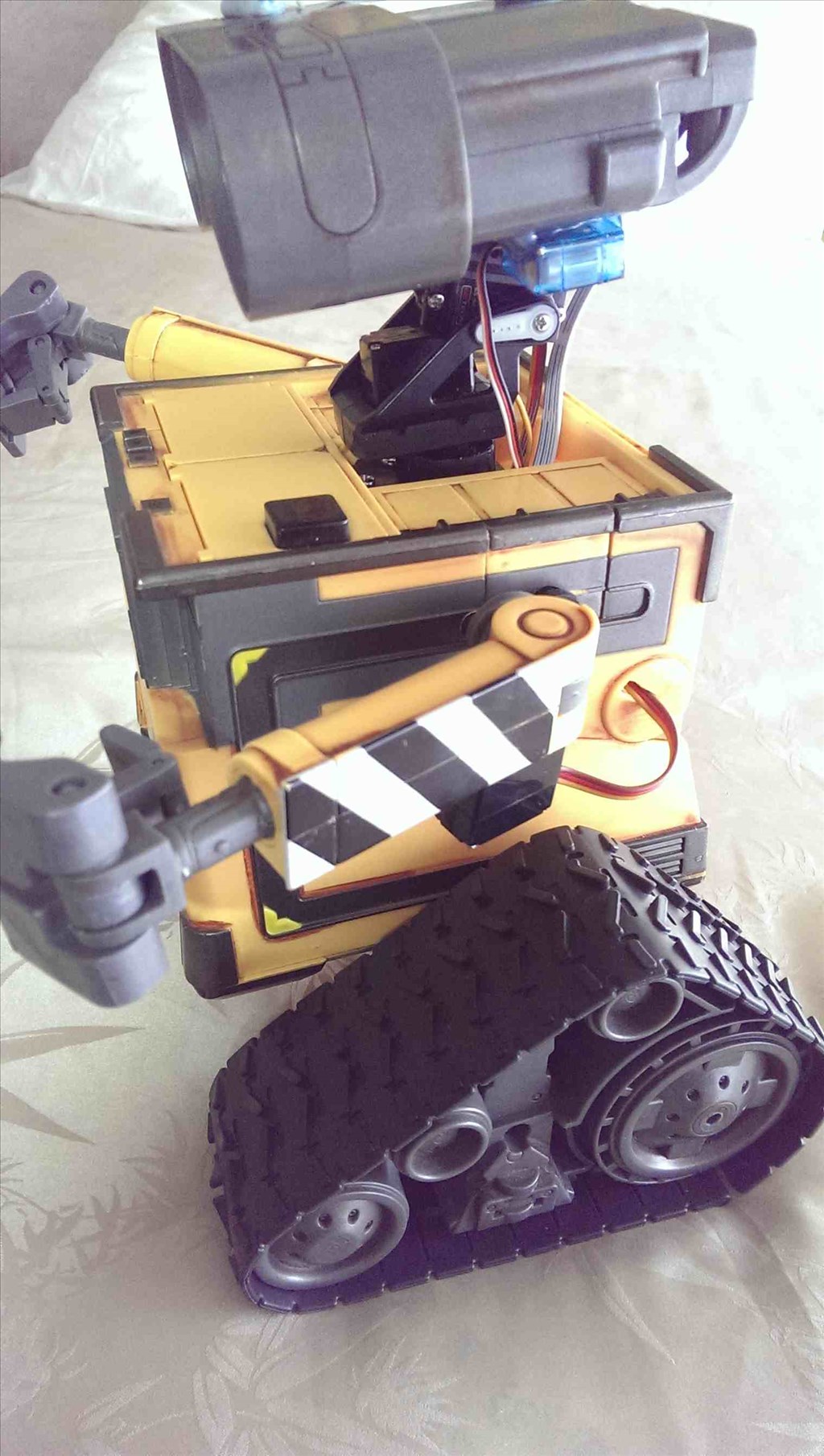
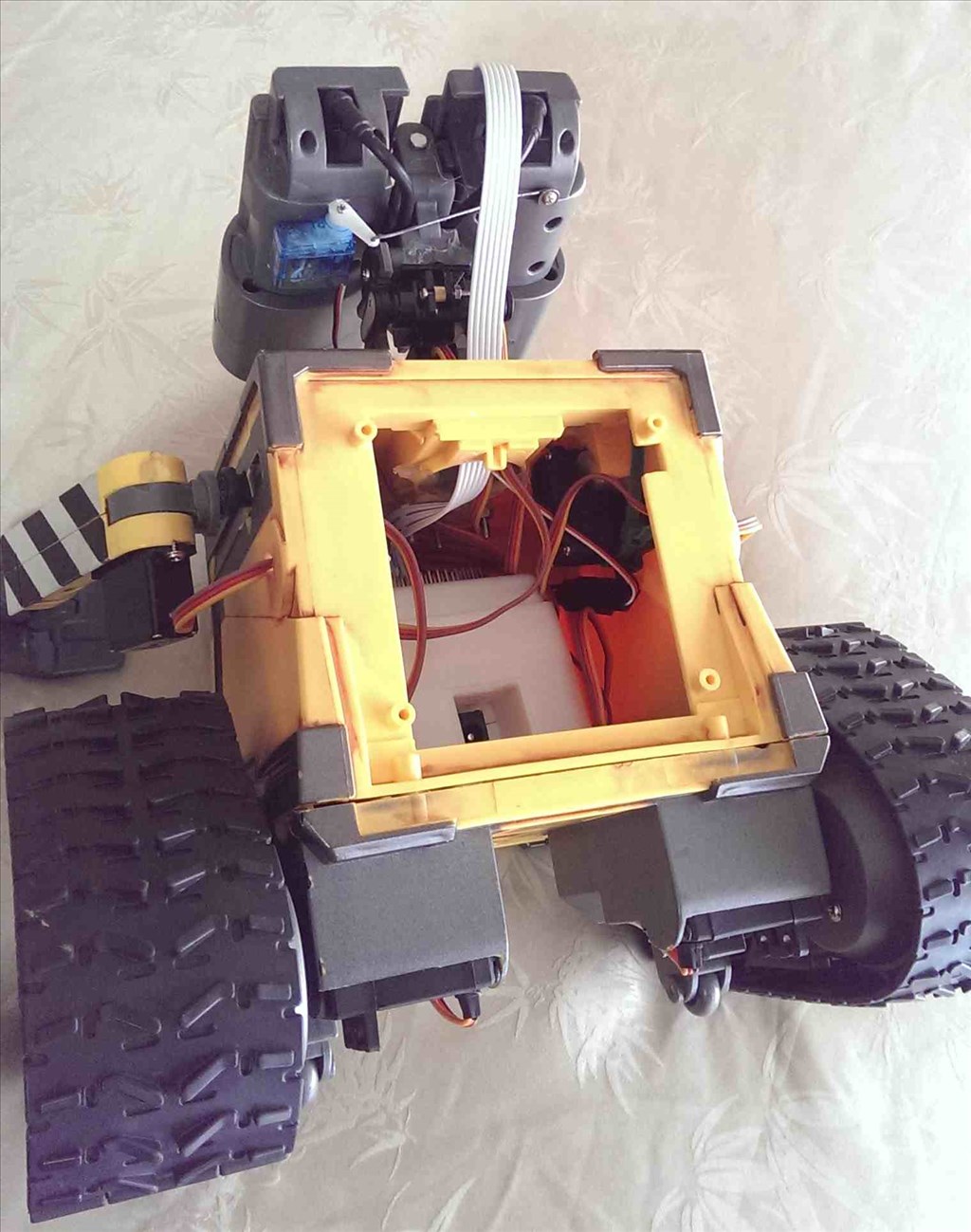
After receiving the Ez-B V4 development kit I was able to advance the build of my Wall-E with the insertion of the supplied continuous rotation servos and attachment of the the two tracks to the body. I'd spent a few months earlier gutting Wall-E and fitting servos for head rotation & tilt, eye twitch and two-way arm movement. I took a shortcut with the head movement by using a tilt/pan servo assembly that I got off ebay - https://www.ebay.com.au/itm/PTZ-Pan-Tilt-Camera-Platform-Anti-Vibration-Camera-Mount-RC-1-2G-2-4G-5-8G-FPV-/161176233437?pt=AU_Toys_Hobbies_Radio_Controlled_Vehicles&hash=item2586da25dd
Once I attached the tracks I could not wait any longer and connected all servos to the Ez-B and powered it up with a 4 x AA power pack to bring Wall-E to life!. I was greeted with the now very familiar "my battery is low" greeting but eventually got around that after connecting Ez Builder via WiFi.
I've been toying with Wall-E & the Ez-B for over a week now, with some success but also faced many frustrating problems. The main ones I think are being caused by power supply. The Ez-B goes into Birko mode for no reason, moving servos to extreme positions & even reversing them. I also get Unhandled Exceptions in the software with a reference to a non-existent D:/directory. This could be Windows 8? I will elaborate more after further testing and list somewhere.
My first aim is to replicate some DJ's Wall-E by studying and adapting scripts from the Legacy Wall-E robots. This will take some time as I'm new to Ez-Builder. I've had success with auto positioning, voice recognition, simple start up scripts and even some face tracking using the camera blue-tacked to the top of Wall-E's head! I've also been able to use the mobile Interface on my Android phone.
I'm having problems slowing down the servos. The worst are the continuous rotation servos supplied in the Development Kit. Their speed is not adjustable by the ARC software, so Wall-E spins his tracks and travels at virtual "break neck" speed making him pretty unmanageable. It's also almost impossible to smooth out the movement of Wall-E's other servos via the software, It's either full speed or very jerky movements.
There are quirks in the software which I would like to list somewhere without getting flamed by the Elite in this forum. One example is the Voice Type. All 3 voices installed in my version of windows get listed in the Speech Settings Panel but the Voice type can't be changed from 'Hazel" even if changed by Windows, ARC insists on using "Hazel"
The Ez-B speaker is very muted inside the Wall-E body. I might try to re-connect the original speaker, although Its ohm rating is not displayed on the case
So, overall, I'm pretty happy and satisfied with the Ez-B V4 and the ARC software. I'm surprised how far I've come in a week of tinkering. If I can do it, anyone can!


Discover more robots

David's Ai Dino Robot
Ezang's My New Crane Robot Video Below

Where I live I think we have the most public holidays in the world so far I can think of ten but they are many more
@Tony1952, Why would you be afraid of being flamed by the "elite" if you ask a question or find a problem with a function in ARC? Have you experienced that problem on this forum yet? Interesting that you would want to insult someone or "your perceived" group of people and then ask for help. Then you Flam Republicans. I guess your "Grumpy" nickname is well deserved.
Hey @Tony1952
The continuous rotation servos in the developers kit are quite fast, we're quite pleased that we were able to find some servos that could be 7.4V compatible and faster (higher rpm) than others on the market.
Generally 360 degree servos are quite slow and most people building robots discount them because of their speed, we wanted to change that paradigm.
The nice thing about these servos, specifically teamed up with ARC, is that you can adjust their speed to however slow you want by using the settings in the servo Movement panel:
Just change the forward and reverse values to somewhere closer to the stop value (89) and you can slow the servos down as much as you'd like. The closer the values are to the center value the slower the servos will move.
As @Jeremie pointed out, you can set the speed in the Movement Panel settings. What you can't do (at least without scripting) is change speed on the fly, but you can set a "permanent" speed. I had to do this with the continuous rotation servers from my V3 developers kit because one spun a little faster than the other, so my robot couldn't go in a straight line. Worked fine having one set to 180 and the other set to 3 instead of 1 (and vis/versa for reverse).
@Dave Schulpius I am not sure if you were joking, but just so you are aware, Republican means something different in Australia then it does in the USA. See: https://en.wikipedia.org/wiki/Republican_Party_of_Australia
Alan
@Dave based on your reaction you must consider yourself one of the "elite"? My fear of flaming is based on observations of this forum for the past 18 months After July when the Revolution robots are released, this forum will be inundated with newbies, making comments, criticism and asking lots of questions. Much patience and tolerance will be required by all.
FYI, outside of the USA, "republican" has different meanings. Here in Australia it's a group of people who are lobbying to make this country a Republic & ditch the British Monarchy.. Absolutely no relationship with the political party in the USA!
@Jeremie & @thetechguru, thanks very much for providing me with the facts on the continuous rotation servos. I'd be quite happy to be able to reduce the speed of the servos which I think would make my Wall-E more stable in his short tracks and more controllable in a confined space I'll give it a try when I get home and report back!
@Tony1952, I am so sorry to hear that you have felt like people were flaming each other on this forum. I agree that there will be a lot of new people on this forum and that a lot of these people will need a lot of help and you make a great point.
I work with people from all around the world. This has given me a slightly different perspective now than I had say 20 years ago. People from different parts of the world carry on conversations differently. Some cultures are very abrupt and to the point, while others are far more "caring" in the delivery of the message that they are trying to convey. This community is made up of people from all around the world with different skill sets in robotics. I have been following this forum for the past few months and have seen that the help that is provided by this community is extremely helpful and I really haven't seen or perceived that anyone is trying to make anyone else feel negative about themselves or anything like that,
Again, you do make a very valid point that there will be much younger and less skilled robot builders on this site very soon, and that they need to be handled a little differently with the responses that are given. Thank you for sharing your perspective.
@Tony1952... What flaming? I haven't seen any flaming on this site since I joined 11 months ago... Sorry, not seeing what your seeing...