



Discover more robots

Ezang's Mr. Conehead Video For You To Watch In 2019
Mr. ConeHead 2019 video to watch, hope it's not too long

Dunning-Kruger's My Inmoov Bartender
Autonomous inMoov bartender using Luis Vazquez TTS jaw movement, inspired by Bob Houston; showcases full autonomy and...
Ezang's Roman The Robot
Roman the Robot using Synthiam ARC with EZ-B v4, Arduino and servos for articulated arms, grippers, camera pan,...

really nice moves - the mannequin is alive :-) I love it - good work
That's great! She sure has powerful limbs. Karate chop!
What's your plan with eve?
Department Stores. Replace every mannequin in the world.
I need a spring counterbalance in every tilt and pan to prevent holding burn, hum and jitter. Gravity is the enemy. Any ideas? I'm thinking either one Torsion spring per motor shaft (like in a mouse trap) or two parallel extension springs. In both cases, the motor will always fight against the springs that are trying to keep it in the center, but gravity will be less of a problem.
Also, I would like to work with Microsoft to compete with Amazon Alexa and Google Home, basically replacing the desktop computer with a talking robot - in conjunction with a screen of course.
What servos are you using? Or did u invent something?
Ps - I like your initiative. Focus combined with a visible goal are the most important ingredients to success
Smart retail Mannequin is priority 1 Retail is doing what they can these days to stay alive.
Retail is doing what they can these days to stay alive.
Sounds great! Thanks
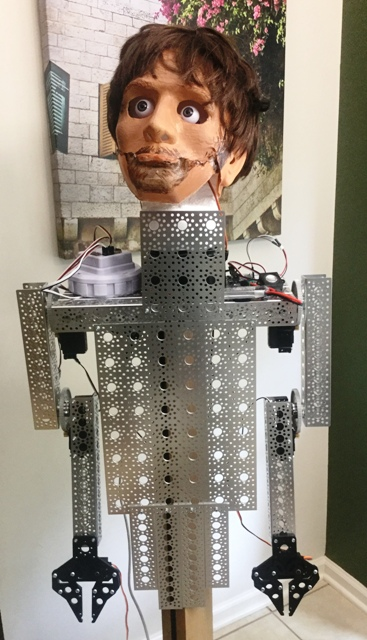
I have spent a lot of money on servos. I'm now using Hitec 9380TH and Hitec 7950TH servos. I have melted a LOT of them. I had to center the shafts which has taken a lot of money - new brass cogs needed to be manufactured, and the best thrust bearings needed to be sourced so the arms could be tightened and still rotate smoothly. The screws are good. The wiring needs refinement. I have restarted this project from scratch many times. The arms used to simply plug in using caravan connectors but now they are bolted to a central core. The legs won't be too difficult because I know how to make them but my 3D printer cannot print what I need, and no existing mannequins allow for proper articulation of the hips so she can dance properly. I may have to start again, simply build a skeleton, then cover her with foam or similar. I intend for her to be suspended by the back of the neck - easily removable to change her clothes.