

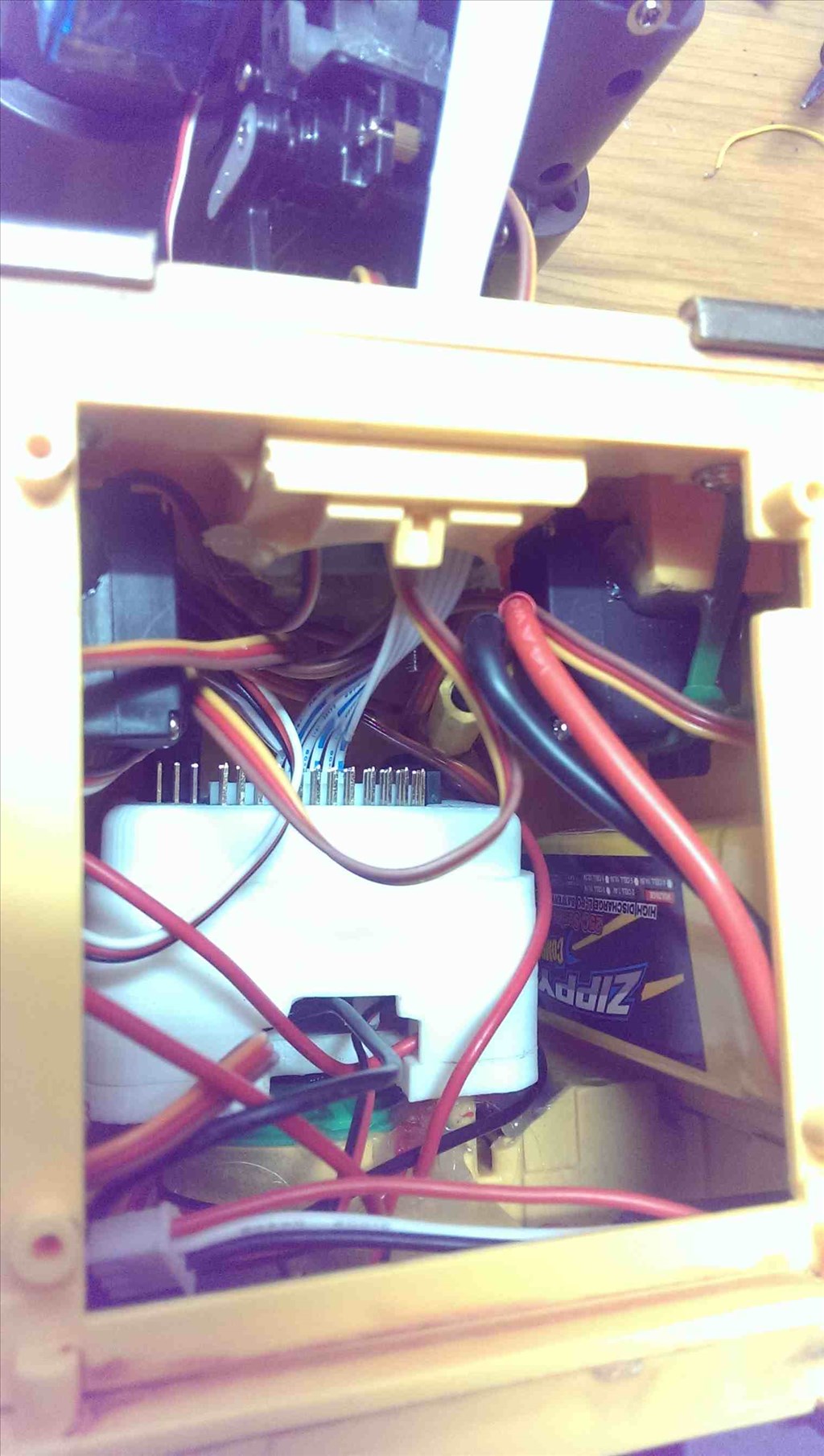
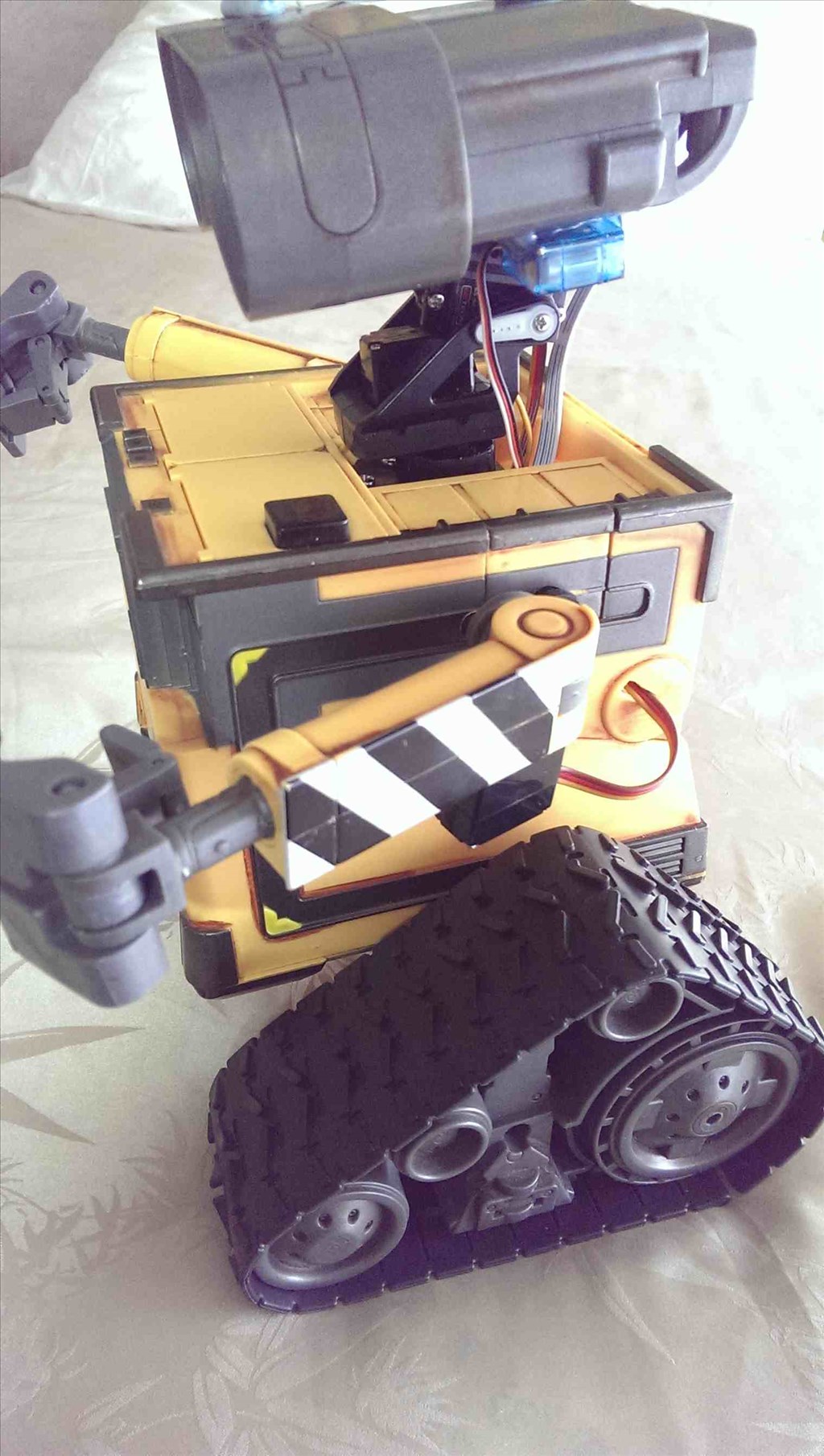
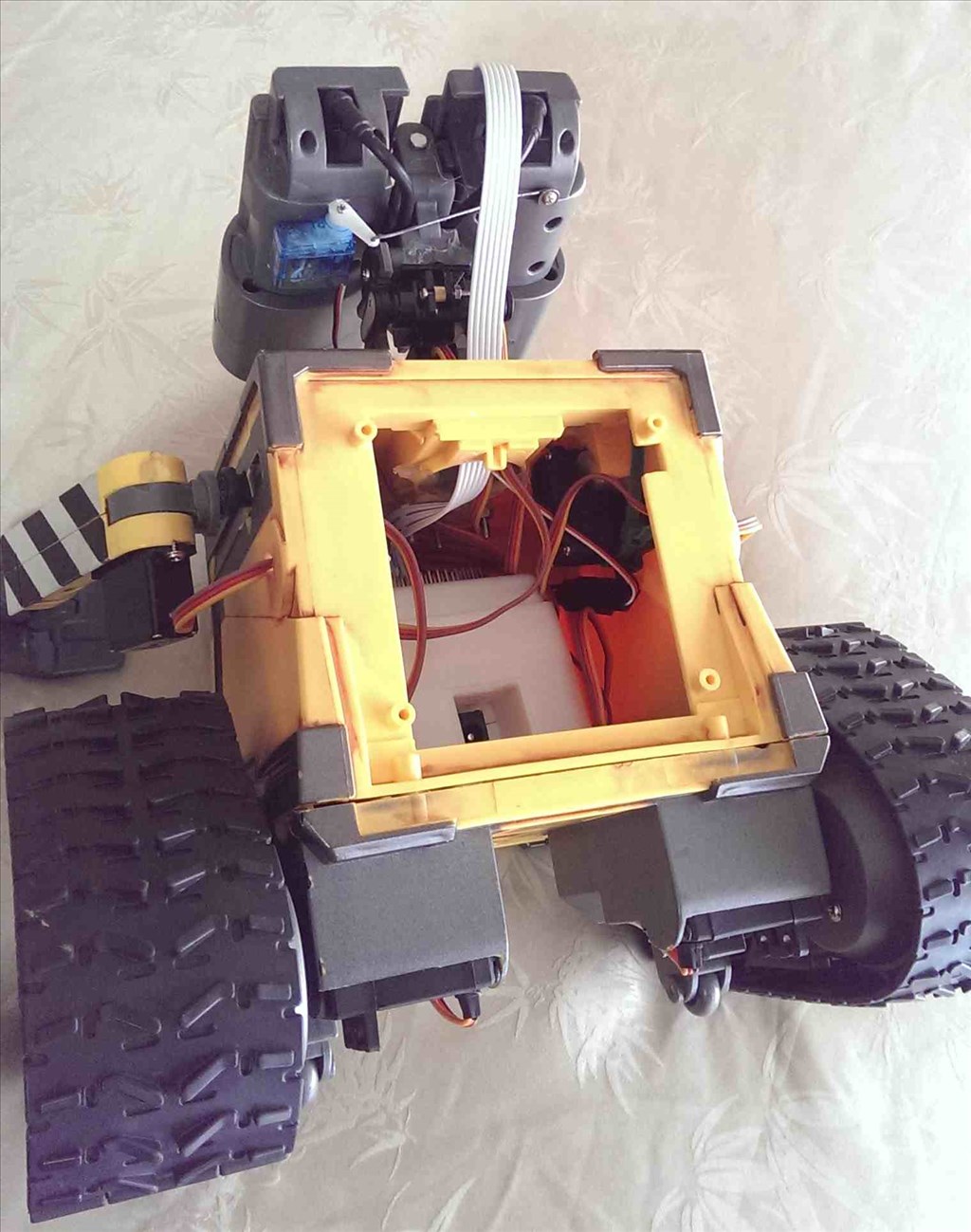
After receiving the Ez-B V4 development kit I was able to advance the build of my Wall-E with the insertion of the supplied continuous rotation servos and attachment of the the two tracks to the body. I'd spent a few months earlier gutting Wall-E and fitting servos for head rotation & tilt, eye twitch and two-way arm movement. I took a shortcut with the head movement by using a tilt/pan servo assembly that I got off ebay - https://www.ebay.com.au/itm/PTZ-Pan-Tilt-Camera-Platform-Anti-Vibration-Camera-Mount-RC-1-2G-2-4G-5-8G-FPV-/161176233437?pt=AU_Toys_Hobbies_Radio_Controlled_Vehicles&hash=item2586da25dd
Once I attached the tracks I could not wait any longer and connected all servos to the Ez-B and powered it up with a 4 x AA power pack to bring Wall-E to life!. I was greeted with the now very familiar "my battery is low" greeting but eventually got around that after connecting Ez Builder via WiFi.
I've been toying with Wall-E & the Ez-B for over a week now, with some success but also faced many frustrating problems. The main ones I think are being caused by power supply. The Ez-B goes into Birko mode for no reason, moving servos to extreme positions & even reversing them. I also get Unhandled Exceptions in the software with a reference to a non-existent D:/directory. This could be Windows 8? I will elaborate more after further testing and list somewhere.
My first aim is to replicate some DJ's Wall-E by studying and adapting scripts from the Legacy Wall-E robots. This will take some time as I'm new to Ez-Builder. I've had success with auto positioning, voice recognition, simple start up scripts and even some face tracking using the camera blue-tacked to the top of Wall-E's head! I've also been able to use the mobile Interface on my Android phone.
I'm having problems slowing down the servos. The worst are the continuous rotation servos supplied in the Development Kit. Their speed is not adjustable by the ARC software, so Wall-E spins his tracks and travels at virtual "break neck" speed making him pretty unmanageable. It's also almost impossible to smooth out the movement of Wall-E's other servos via the software, It's either full speed or very jerky movements.
There are quirks in the software which I would like to list somewhere without getting flamed by the Elite in this forum. One example is the Voice Type. All 3 voices installed in my version of windows get listed in the Speech Settings Panel but the Voice type can't be changed from 'Hazel" even if changed by Windows, ARC insists on using "Hazel"
The Ez-B speaker is very muted inside the Wall-E body. I might try to re-connect the original speaker, although Its ohm rating is not displayed on the case
So, overall, I'm pretty happy and satisfied with the Ez-B V4 and the ARC software. I'm surprised how far I've come in a week of tinkering. If I can do it, anyone can!


Discover more robots
Cardboardhacker's M2d2-The Diy Miniture R2d2 By...

DJ's Imperial AT-AT Walker Robot - The Force Is With Me!


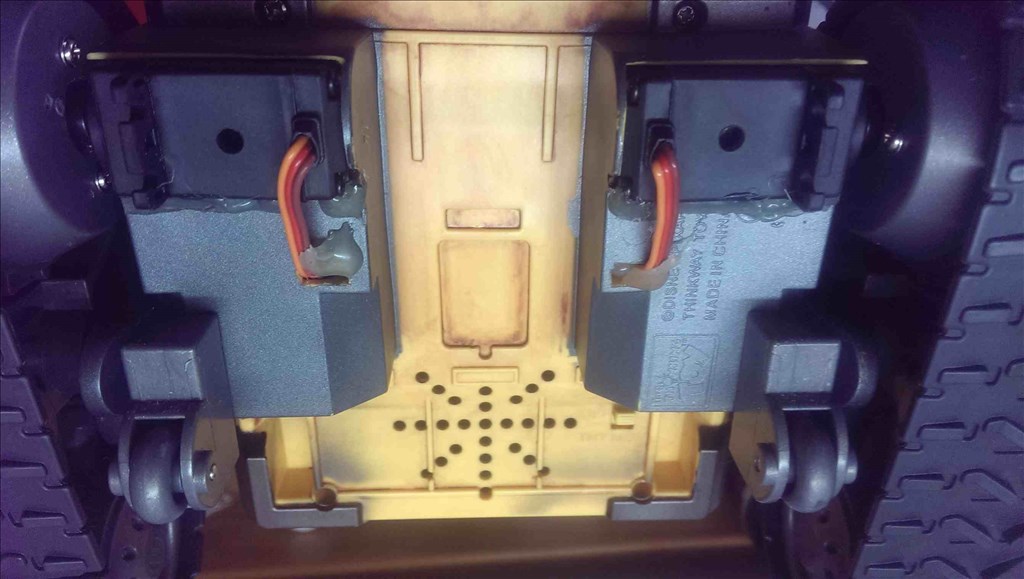
I wish I had known about the adjustment screw before I glued down my servos with no room to access the bottom. Oh well, adjuring the max/min settings let me equalize them pretry well.
I may be rebuilding this Bot when I get my v4 boards anyway.
Alan
@thetechguru I first noticed the holes when gluing the servos in from the bottom! It's fortunate that I had positioned the servos this way, otherwise they would not have been accessible.
@Tony1952,
I know your having problems with your sound. I posted this in another thread but I thought I'd add it to this thread also incase you miss it:
<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
I've been thinking about your sound problem and have a few ideas to throw your way.
First, I noticed a few things when I was struggling with the poor sound issue I was having when first setting up an external amp and speakers on my new V4. Sound quality varied greatly between different sound files and also types of files. I think this was because some of my files were not sampled lower than others. Also in my case I found that my .WAV files played much better than .MP3 files. Try to find higher quality files and see how they sound. Perhaps you can resample your sound files using a sound editor like Sound Forge (at $200 it costs a lot but there are other free programs that will do the same thing. Sound Forge
Second; If that won't fix it maybe you can add a small external amp and use the breakout hole before V4's built in amp and an external speaker. I did did a tutorial on how to do this here:
Breaking Out The Sound From The V4 Ezb
If you don't use the power base, remove the little deans connector and solder wire in for a pigtail power connector you will have lots of extra room in your bot. If you're concerned about a fuse you can use a inline fuse in the positive wire. Here are a few examples of hardware you could use:
In-line AGC Fuse Holder
Mini 5V Audio Ampli Digital Amplifier Board
Hope this solves your problems. Let us know.
@Tony1952- I too am a use and re-use kind of guy. People are familiar with DIY but not many are aware of DYK, as in "Do You Know, what that's going to cost?" I commend you good sir.
I once ruined an HD servo and the one I ordered to replace it was defective. They told me to just keep it and refunded my money. I then used it's good parts to fix the servo I ruined. So, I got to fix it for free. So, you should be able to get parts for your servo and fix it.
So, you should be able to get parts for your servo and fix it. It was actually really easy. I hope this helps you out some.
It was actually really easy. I hope this helps you out some.
@Antron007 thank you for your commendation and encouragement! I commend you too mate! I will have a go at fixing that servo, or keep it for repair of others
I prefer to fix things rather than throw away. If it can't be fixed it is kept for spare parts for future repairs, unless it's bulky and the wife insists on disposal! I'm sure most people in this forum keep screws, connectors, wires and all sorts of oddities for future use - I've seen it in the background in their videos!
@Dave Schulpius, many thanks for your ideas regarding my sound problems and the Amazon links. I have also read through the thread "Breaking Out The Sound From The V4 Ezb" and watched the video tutorial. I did see the original tutorial and find the sound improvement significant (using the ext Amp)
I'll convert all my Wall-E sounds to WAV to check out the difference Also I'll remove the power base, get the In-line AGC Fuse Holder and direct-wire to the Ez-B board. This will give me the extra room I need inside Wall-E. By the way, the last time I saw one of those in-line fuse holders was when I installed a radio into my first car many decades ago! I did not know they (and the glass tube fuses) still existed till I checked your Amazon link. I also didn't know those tiny amps existed! I've ordered one off ebay as postage from Amazon is highway robbery, but it will take a month to get here.
At this early stage I'm really not that unhappy with the sound output via the external speaker that I installed in Wall-E. I find that the sliding volume control on the Soundboard V4 panel gets distortion at either end, otherwise its good in mid range.
My key issue is the static sound I get when I start the camera. It's always there when the camera is on and gets very annoying. I tell family it's Wall-E thinking. I've tried putting foil shield around the cable, moving the camera, etc etc but nothing stops it except the camera stop button. I will try the external amp to see if that is the cure.
Do you have a V4 camera? Do you get any static sounds when the camera is on? I've attached a poorly made video (with my phone) demonstrating the sound using Wall-E's original inbuilt speaker and using WAV files with the Soundboard set at mid vol. Not bad
for a Wall-E in my opinion and significantly better than the Ez-B inbuilt speaker muffled by the base and by being inside Wall-E's body. You'll see in the video my inability to give Wall-E a male voice. Also at the end is the static sound I get from the camera
Humm, Yes, I can hear the static sound in your vid. I sounds like electronic noise. I do have a V4 camera but haven't even hooked it up yet. I'm going to have to give it a try now to see I can hear it in my setup.
I've found that noise like this usually travels through the ground connections. Make sure you don't have any ground loops built into your setup. They are kinda hard to find and understand but simply put you may have two devices at different ground potential fighting over one ground connection. Here's a Youtube vid that explains it:
There are also many internet articles on this problem. Here's a good one to read:
www.epanorama.net/documents/groundloop/
The easiest way I've found to eliminate this problem is to run two different power supplies and keep the noisy electronics on a different power supply then the sound amp. However in the case of a small robot that may be hard to do because of size constraints.
@Dave Schulpius, thanks for the video and the web link which I have watched/read. Some is over my head but I do get the drift and it explains what I have heard and experienced in audio and PA systems over many years. I would not know where to start looking! My setup is very basic - 9 servos & a camera connected to the Ez-B, powered by a 7.4v LiPo battery. I've used a different 7.4v LiPo battery from the one supplied by Ez-Robot. I've unplugged all the servos. I've even put back the original micro speaker. All with no improvement .
The Ez-B by itself is dead quiet until you push the volume to the max with scripting - SetVolume(200). I did that before connecting to the external speaker. It was the only way I could hear the std speaker from inside Wall-E (with his back door open). Every sound got distorted and there was crackling at idle.
The culprit definitely is the camera. When started via the camera console the sound is what you heard and gets worse as the volume is turned up.
The only other thing I am capable of doing is check the camera cable by trying to get another one from somewhere
I'd be interested to know if you hear anything from your camera
.
The Ez-B by itself is dead quiet until you push the volume to the max with scripting - SetVolume(200). I did that before connecting to the external speaker. It was the only way I could hear the std speaker from inside Wall-E (with his back door open). Every sound got distorted and there was crackling at idle.
The culprit definitely is the camera. When started via the camera console the sound is what you heard and gets worse as the volume is turned up.
The only other thing I am capable of doing is check the camera cable by trying to get another one from somewhere
I'd be interested to know if you hear anything from your camera