

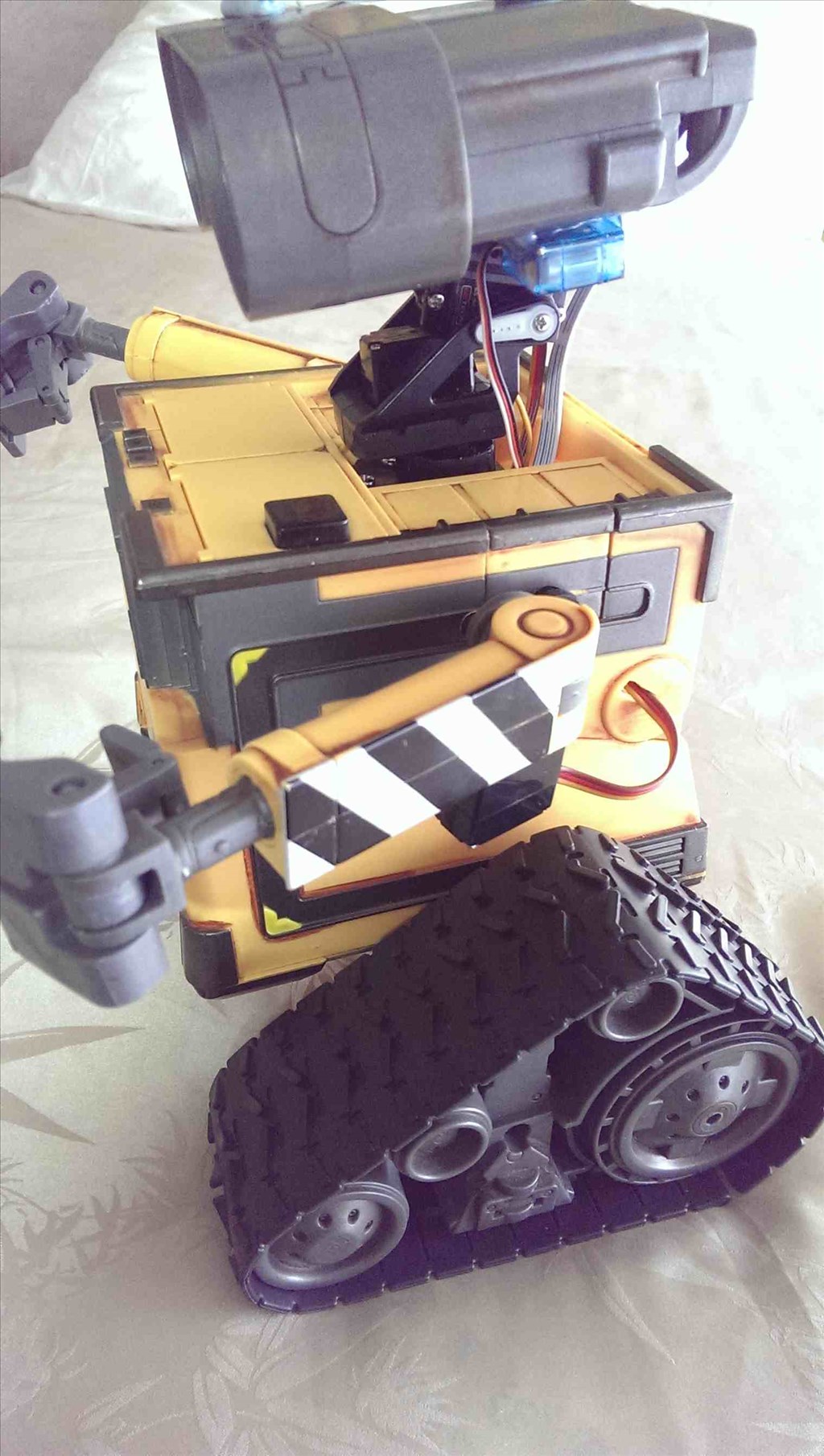
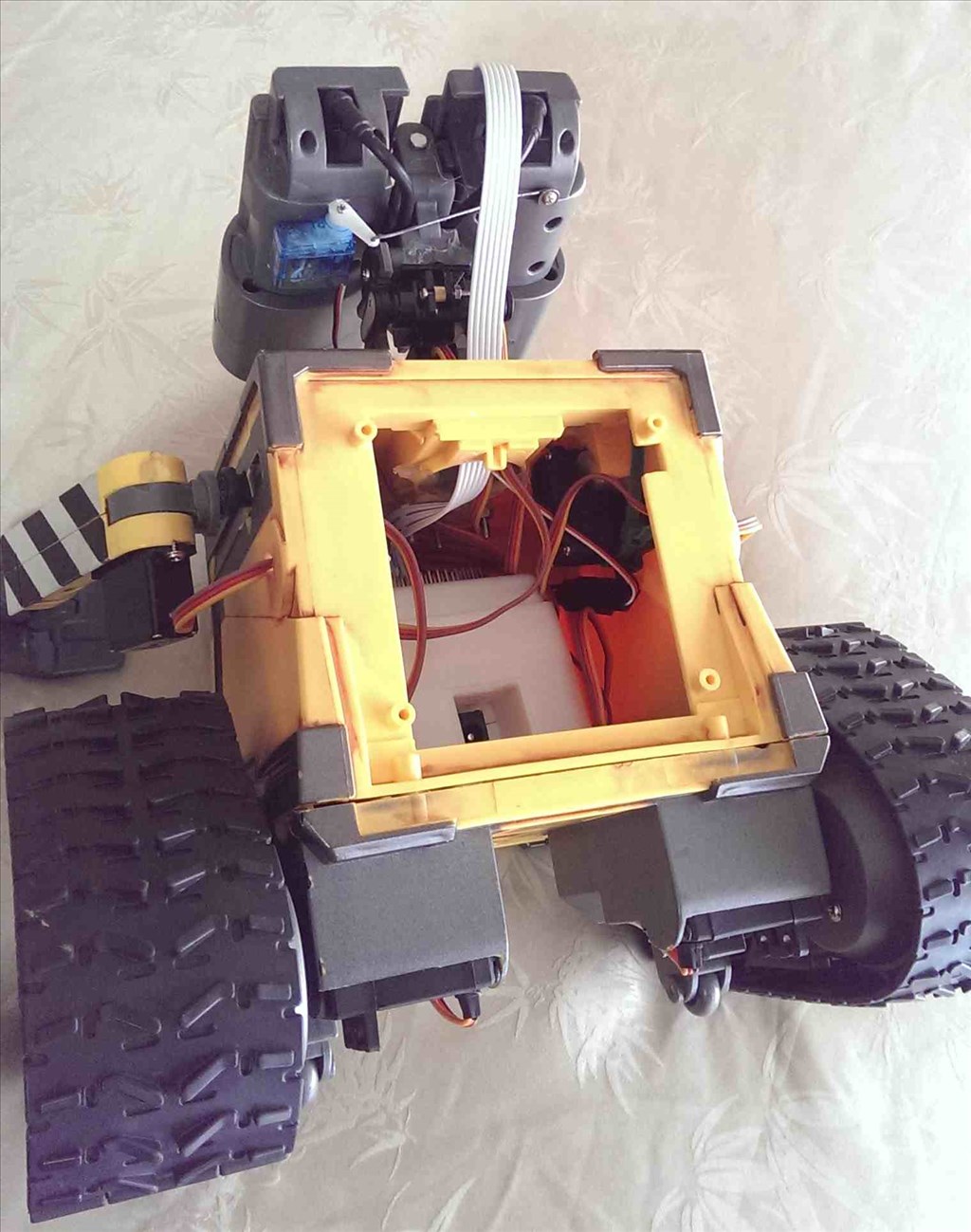
After receiving the Ez-B V4 development kit I was able to advance the build of my Wall-E with the insertion of the supplied continuous rotation servos and attachment of the the two tracks to the body. I'd spent a few months earlier gutting Wall-E and fitting servos for head rotation & tilt, eye twitch and two-way arm movement. I took a shortcut with the head movement by using a tilt/pan servo assembly that I got off ebay - https://www.ebay.com.au/itm/PTZ-Pan-Tilt-Camera-Platform-Anti-Vibration-Camera-Mount-RC-1-2G-2-4G-5-8G-FPV-/161176233437?pt=AU_Toys_Hobbies_Radio_Controlled_Vehicles&hash=item2586da25dd
Once I attached the tracks I could not wait any longer and connected all servos to the Ez-B and powered it up with a 4 x AA power pack to bring Wall-E to life!. I was greeted with the now very familiar "my battery is low" greeting but eventually got around that after connecting Ez Builder via WiFi.
I've been toying with Wall-E & the Ez-B for over a week now, with some success but also faced many frustrating problems. The main ones I think are being caused by power supply. The Ez-B goes into Birko mode for no reason, moving servos to extreme positions & even reversing them. I also get Unhandled Exceptions in the software with a reference to a non-existent D:/directory. This could be Windows 8? I will elaborate more after further testing and list somewhere.
My first aim is to replicate some DJ's Wall-E by studying and adapting scripts from the Legacy Wall-E robots. This will take some time as I'm new to Ez-Builder. I've had success with auto positioning, voice recognition, simple start up scripts and even some face tracking using the camera blue-tacked to the top of Wall-E's head! I've also been able to use the mobile Interface on my Android phone.
I'm having problems slowing down the servos. The worst are the continuous rotation servos supplied in the Development Kit. Their speed is not adjustable by the ARC software, so Wall-E spins his tracks and travels at virtual "break neck" speed making him pretty unmanageable. It's also almost impossible to smooth out the movement of Wall-E's other servos via the software, It's either full speed or very jerky movements.
There are quirks in the software which I would like to list somewhere without getting flamed by the Elite in this forum. One example is the Voice Type. All 3 voices installed in my version of windows get listed in the Speech Settings Panel but the Voice type can't be changed from 'Hazel" even if changed by Windows, ARC insists on using "Hazel"
The Ez-B speaker is very muted inside the Wall-E body. I might try to re-connect the original speaker, although Its ohm rating is not displayed on the case
So, overall, I'm pretty happy and satisfied with the Ez-B V4 and the ARC software. I'm surprised how far I've come in a week of tinkering. If I can do it, anyone can!


Discover more robots

Rb550f's Romnibot
Jstarne1's Diy Awesome Project Case Made From Netgear...


Tony1952, Try the box bot servo movement panel. You can find the file for box bot, it allows changes to the values. Steve S
Nice build. My Wall-E is in pieces at the moment waiting to be converted but then it's been like that for months now...
As for speech... I know I had issues with Windows 8 and voices in the fact that I needed to try different settings to get the voice to work. It was trial and error in the end and I just checked all combinations of Gender, Age and Emphasis, eventually I found the right combination which worked for the voice I was using. Try that, once you know what it needs to be on use the controlcommands to set it during it's init. sequence.
The servo speeds for the modified servo Movement Panel may give you an issue as you cannot change the speed of a modified servo drive train using this panel, you either have forward or reverse for each servo.
You could use a custom Movement Panel and script the controls though but it would require a fair amount of scripting to add speed control since in order to modify the speed of a modified servo (as far as I am aware, someone else may correct me though) you basically need to use the Servo() command and ask it to move to a specific servo position. Position 1 is full speed forward, 49 is stop and 100 is full reverse. So take that, and use the Servo(port,$speed) command to produce scripts which allow speed control. I don't have such a script written nor do I have the time to write one before next week but if you think logically it should be pretty easy to figure out.
That said, modified servos are slow so I personally wouldn't want speed control. If I did then I would change the servos to motors and use a H-Bridge.
Thanks Mohamed.r I intend to put the camera into Wall-E's eye one day. It's a very big exercise. For the moment the camera is blue-tacked to his head for testing and learning. I was a bit worried that the wide ribbon cable would obstruct head movement, but it's OK
Thanks Jason Z. It's still fairly quiet days in this forum but once the orders get sent our In July it will get BUSY! Exciting days ahead for all
Thanks for the suggestions Steve's and Rich! I'll give them a try when I get back home on Tuesday Queen's Birthday long weekend here - God save the Queen! (and thanks for the holiday!)
The modified servos on my Wall-E are much too fast and have too much torque. He actually spins his tracks on tackoff on a smooth surface like tiles and on carpet he flips and nearly falls in his back The speed of travel means I need a large room for testing.as it's not long before he crashes into a wall. Testing any routines is too dangerous on a desktop!
Rich is correct on the 1,(49),100 positions. I've done this and this is the method I'm going to use to make keyboard controls for my cameras pan and tilt. I put 49 in () because servos very. For some reason my mod servos stop at 52.
In this example, they are moving very slow. The closer to center the slower the servos will move.
Like Rich also said, there are better ways of doing what you want to do. I'm using this out of necessity. I came up with this because I have to make due with the parts I have/will have.
Hope it helps.
Wait, what? You get a day off for the Queen's birthday? The Queen of the country I live in? I don't get a day off!..
Hey Rich, we do (Canada) too... 24th of May is a long weekend here to Celebrate the Queens birthday....
Rich, that's because we love our/your queen so much! Although there are lots of "republicans" here that want to ditch her. I bet they don't go to work on Monday to demonstrate their belief! I'm sure you get random holidays for other things. You have to break up the working year somehow. It's much too long.
Here's an interesting fact I just googled - "The Queen celebrates two birthdays each year: her actual birthday on 21 April and her official birthday on a Saturday in June"
.....and the colonial peasants celebrate with a holiday at random times of the year!