
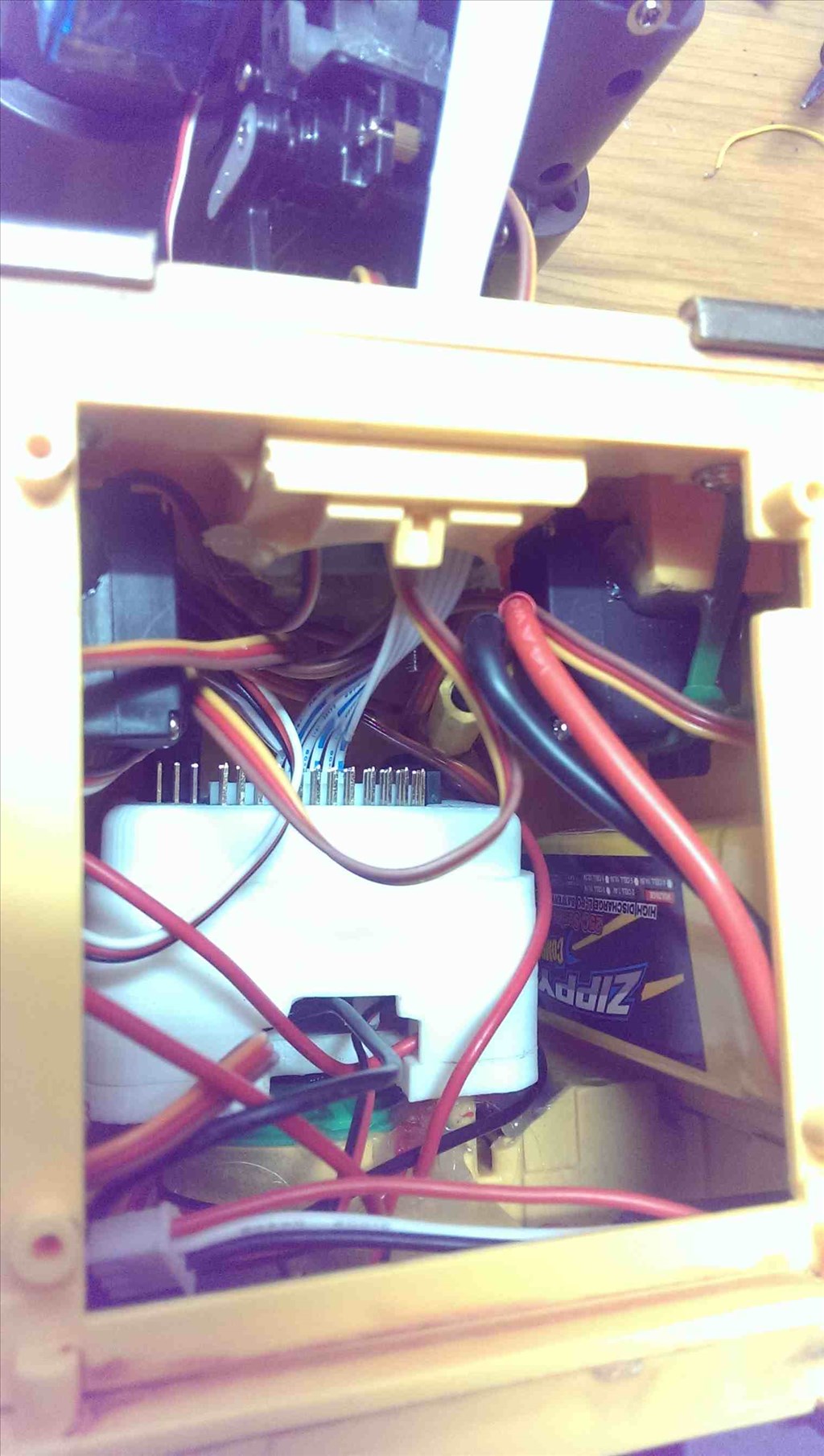
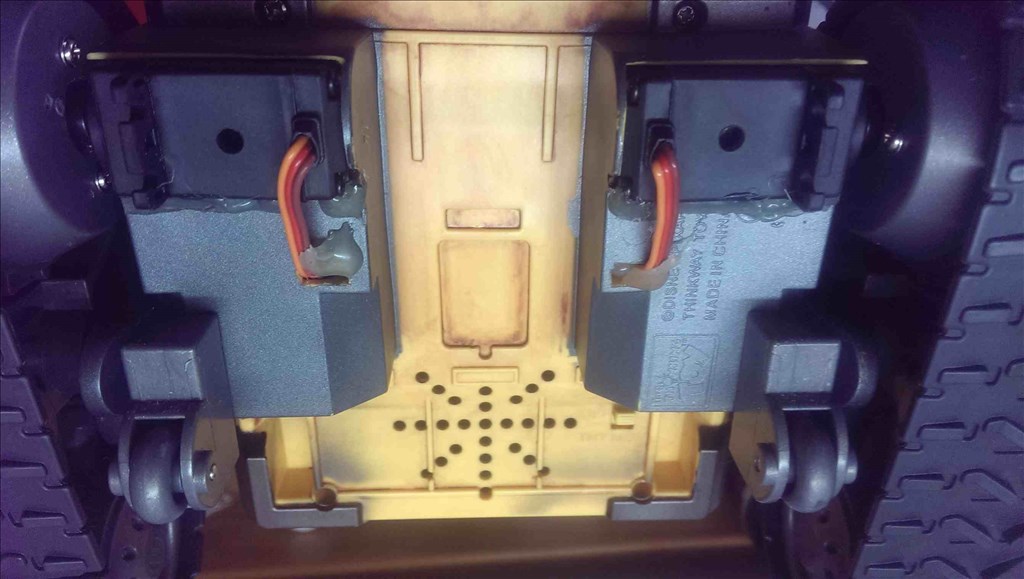
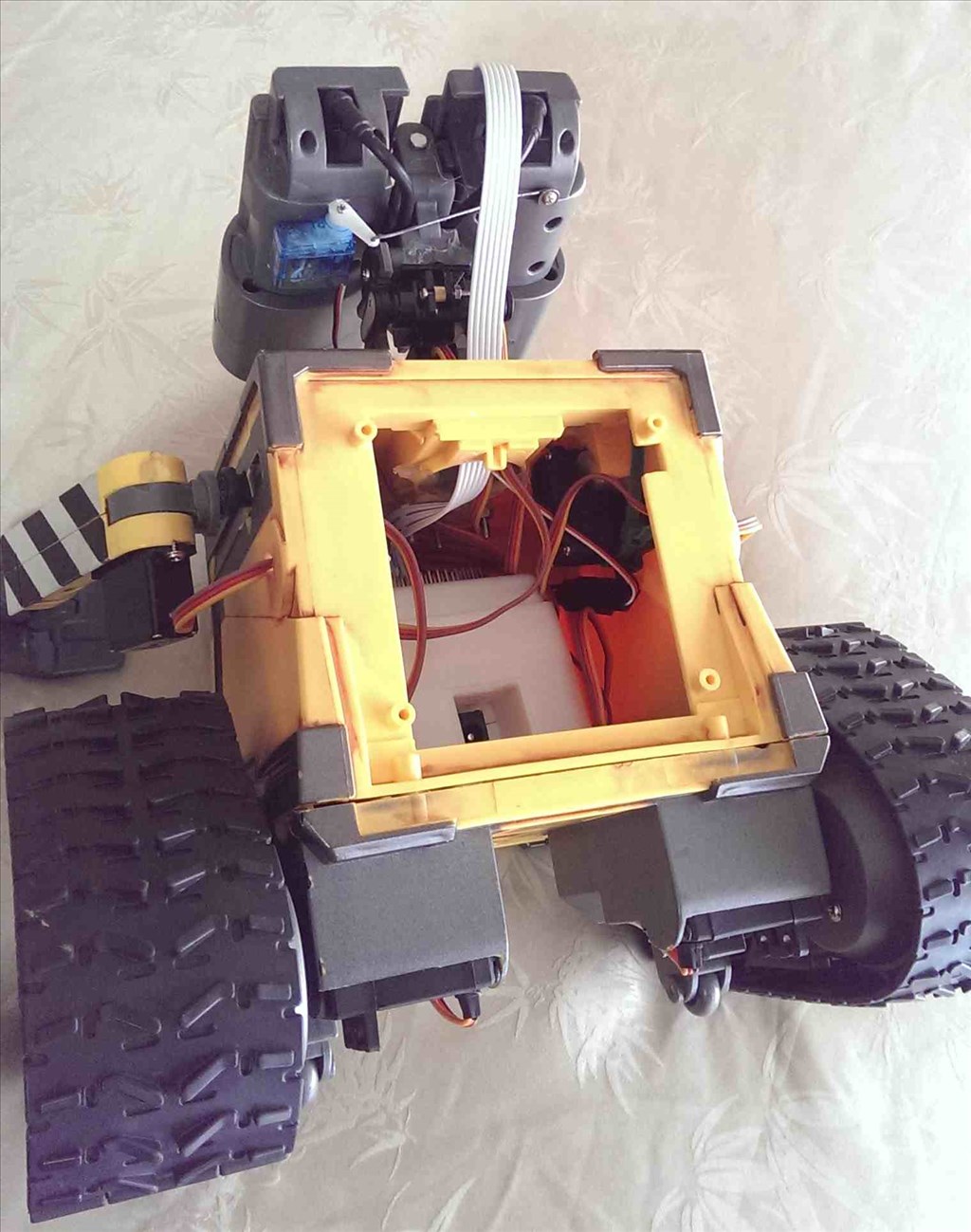
After receiving the Ez-B V4 development kit I was able to advance the build of my Wall-E with the insertion of the supplied continuous rotation servos and attachment of the the two tracks to the body. I'd spent a few months earlier gutting Wall-E and fitting servos for head rotation & tilt, eye twitch and two-way arm movement. I took a shortcut with the head movement by using a tilt/pan servo assembly that I got off ebay - https://www.ebay.com.au/itm/PTZ-Pan-Tilt-Camera-Platform-Anti-Vibration-Camera-Mount-RC-1-2G-2-4G-5-8G-FPV-/161176233437?pt=AU_Toys_Hobbies_Radio_Controlled_Vehicles&hash=item2586da25dd
Once I attached the tracks I could not wait any longer and connected all servos to the Ez-B and powered it up with a 4 x AA power pack to bring Wall-E to life!. I was greeted with the now very familiar "my battery is low" greeting but eventually got around that after connecting Ez Builder via WiFi.
I've been toying with Wall-E & the Ez-B for over a week now, with some success but also faced many frustrating problems. The main ones I think are being caused by power supply. The Ez-B goes into Birko mode for no reason, moving servos to extreme positions & even reversing them. I also get Unhandled Exceptions in the software with a reference to a non-existent D:/directory. This could be Windows 8? I will elaborate more after further testing and list somewhere.
My first aim is to replicate some DJ's Wall-E by studying and adapting scripts from the Legacy Wall-E robots. This will take some time as I'm new to Ez-Builder. I've had success with auto positioning, voice recognition, simple start up scripts and even some face tracking using the camera blue-tacked to the top of Wall-E's head! I've also been able to use the mobile Interface on my Android phone.
I'm having problems slowing down the servos. The worst are the continuous rotation servos supplied in the Development Kit. Their speed is not adjustable by the ARC software, so Wall-E spins his tracks and travels at virtual "break neck" speed making him pretty unmanageable. It's also almost impossible to smooth out the movement of Wall-E's other servos via the software, It's either full speed or very jerky movements.
There are quirks in the software which I would like to list somewhere without getting flamed by the Elite in this forum. One example is the Voice Type. All 3 voices installed in my version of windows get listed in the Speech Settings Panel but the Voice type can't be changed from 'Hazel" even if changed by Windows, ARC insists on using "Hazel"
The Ez-B speaker is very muted inside the Wall-E body. I might try to re-connect the original speaker, although Its ohm rating is not displayed on the case
So, overall, I'm pretty happy and satisfied with the Ez-B V4 and the ARC software. I'm surprised how far I've come in a week of tinkering. If I can do it, anyone can!


Discover more robots

DJ's Multiple Robots With One Joystick

Andy's Antonn


First, congrats on the build. I am doing a similar build.
What I have found is that the community is very helpful. If you post questions, they get answered by either those at Ez-Robot or by others who have faced similar issues. Please post any questions or issues that your are facing. Others will face the same issues and your questions will help others by providing answers.
As far as changing the voice, I am going to try to use this bit of script in my startup script.
I would be interested in knowing if it works for your build or if the same default voice is used. I know Rich is changing his voice for his Jarvis project. He might be able to provide a solution.
As far as your servo issue, someone else with the V4 would probably be much better at answering that.
The speaker muting issue, I know that the EZ-Robot kits use part of the case to amplify the sound. This is done by porting the speaker. There is a hole in the plastic bodies that is used to direct the sound from the speaker. I don't have one of these, but have seen a video that DJ talks about this. I am thinking about doing a similar thing in my build. If that doesn't work, I will be using the speaker that is in the wall-e. I am pretty sure it is an 8 ohm speaker and can be wired to the speaker connectors on the bottom of the EZ-B v4. This would require you to modify your design some by removing the case, wiring the speaker, and then providing a means for the wires from the external speaker to leave the EZ-B case. There may already be a hole but I dont think there is. I too will be facing this if the porting idea doesn't work out.
Tony1952, Nice robot. I have a stock Wall-E. I just tried and was able to change (slow) the speed of my grandsons robot continuous rotation servos by changing the values in the servo movement panel. It uses EZB3. I am not sure about changing it in script? You will get things adjusted. Steve S
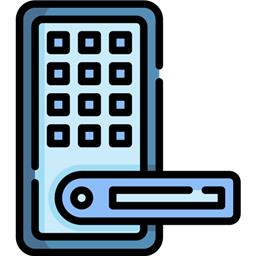
@ d.cochran, thanks for your rapid responses! Unfortunately I'll be away from home for a few days so I won't be able to test your script right now. I am able to change the speed of speech with the control panel but not change to any of the other 2 voices installed in my Windows 8. They get listed in the ARC speech control panel but don't change when selected. I'll try your script when I get back. The Ez-B V4 plugs into a base which houses a fuse and std power socket. I think this base already mutes the speaker a bit and once inserted into Wall-E's body, most of the sound is lost, even when set at the "turbo 200" volume. The base also increases the overall size of the unit dramatically and it barely squeezes inside of my Wall-E which I thought had tons of room. I might do away with the base and wire in a micro deans connector via a fuse and switch in the base of Wall-E, so I can turn him off quickly when he gets out of control! I've literally caught him several times racing off the benchtop when his track servos are mysteriously triggered and the Ez-B is frozen. confused
Thanks @Steve S! When I first got my Wall-E off eBay and opened him up I was so impressed by the build quality that I became reluctant to convert him into a robot. I put him back together and left him intact for a couple of months
My servo Movement Panel does not have a drop-diwn box for speed control. I have tried using the separate speed control boxes with sliders, assigning one to each continuous servo, but servos don't move when set away from the max level. The manual does say that some continuous servos can't be adjusted. I suspect mine fall I to this category, I hope not though!
Great build I think you are the first person to build a robot with the v4 but If you want to make your wall e look like djs then take apart the eyes and put the camera inside the eyes
Great work so far Tony! There will be many new Wall-E's being built with the V4, which will bring alot of support from the various users. We are really excited to see what everyone comes up with
I didnt think about the power base. My plan was to do like you are contemplating and not use the power base. I have an ubec that is wired to the power switch. This will power the EZ-B. My servos and sensors are all 3.3 or 5V so I will be listening to the "low power" message at bootup and powering everything from 5v and wire the power into the ez-b itself instead of using the base.
Space seems much roomier in these until you start packing in the board and sensors. My goal is to totally populate the board with every sensor that I can put it it. Using it to demo some of the capabilities of the EZ-B to schools.