



































Hello all, I wanted to start my own thread to discuss my Inmoov and my conversion to EZ Robot. I appreciate all the work by the MRL guys but I struggle with it. I am indebted to the help they gave me but I needed something a little more along in development with some documentation.
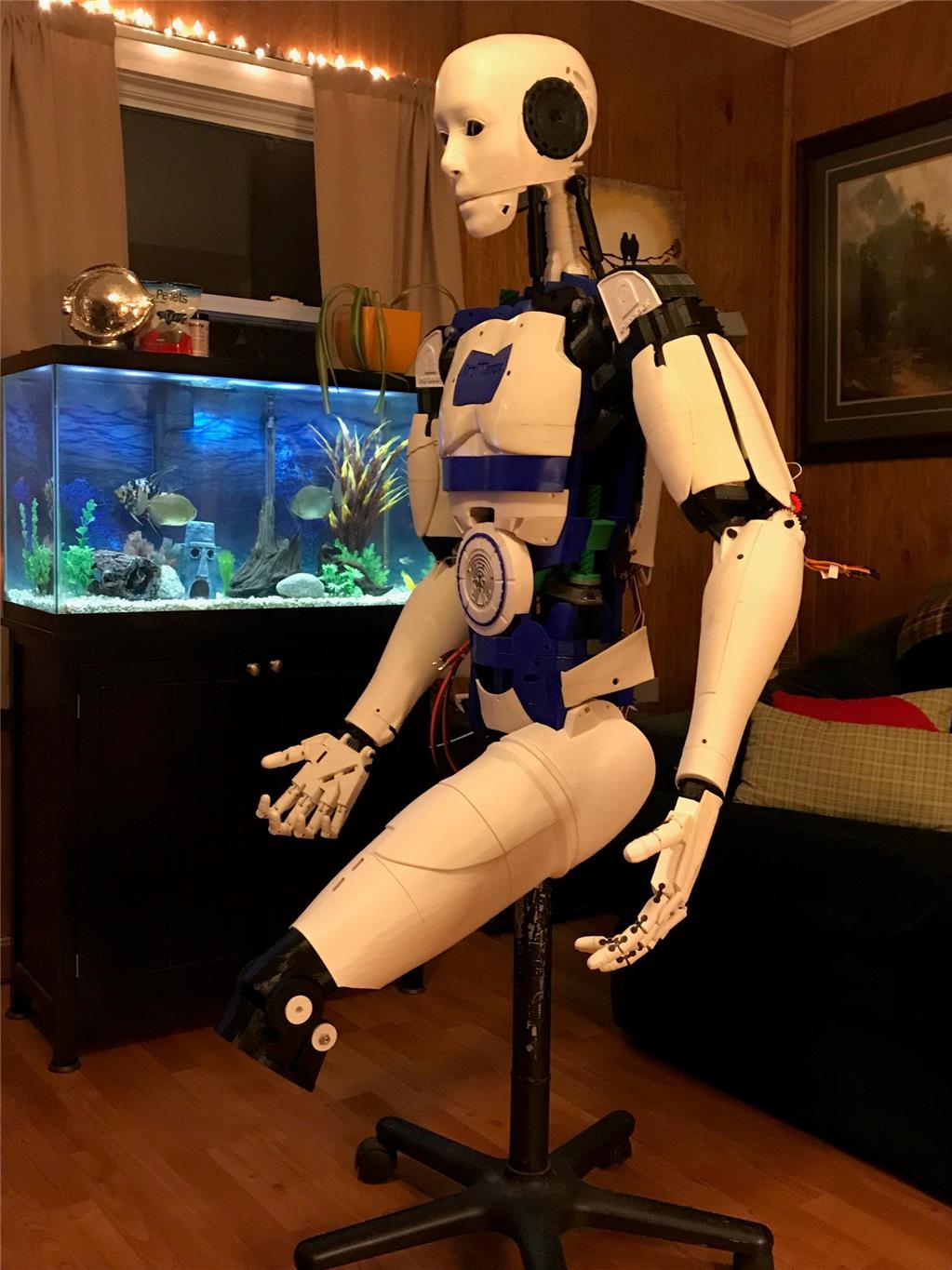
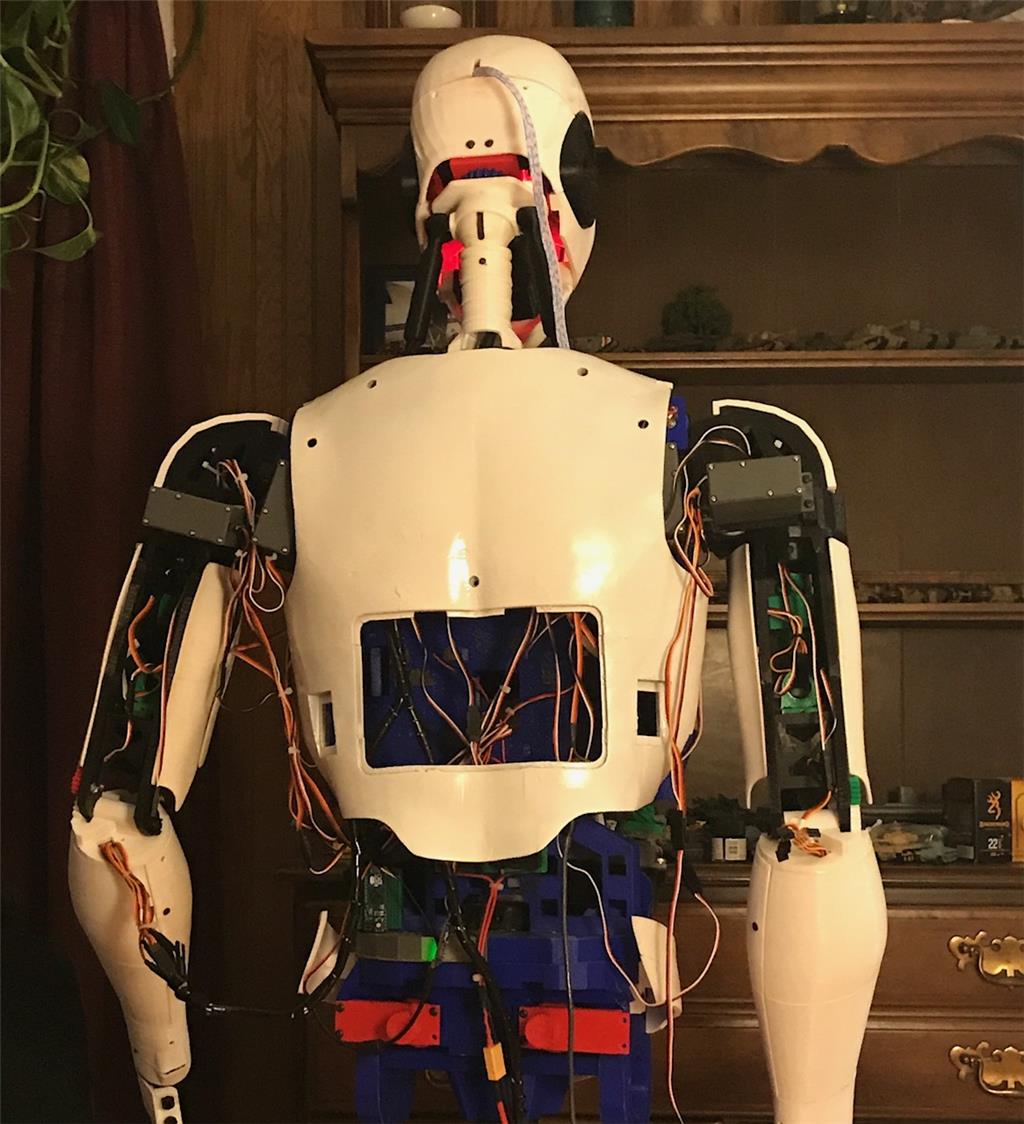
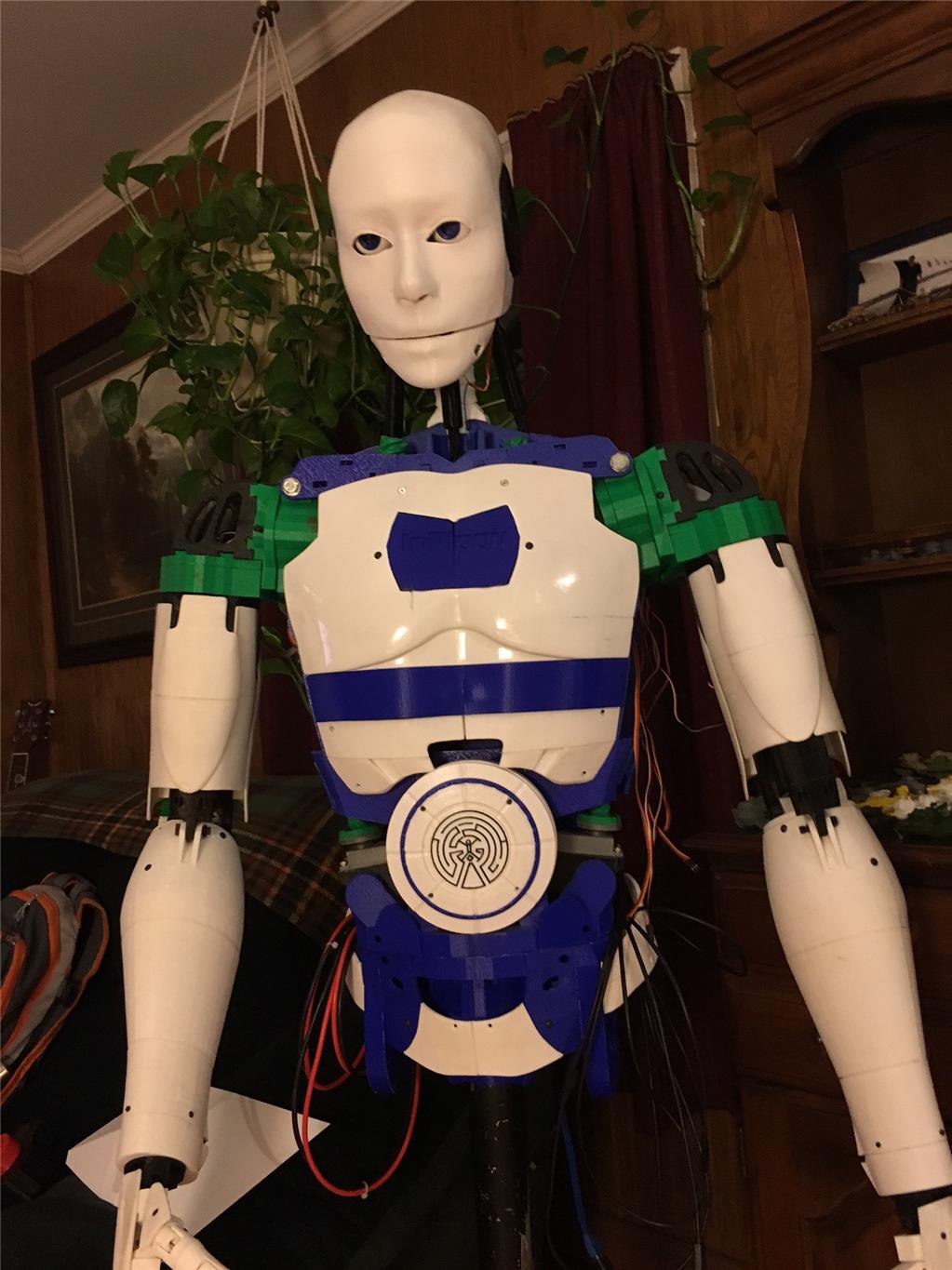
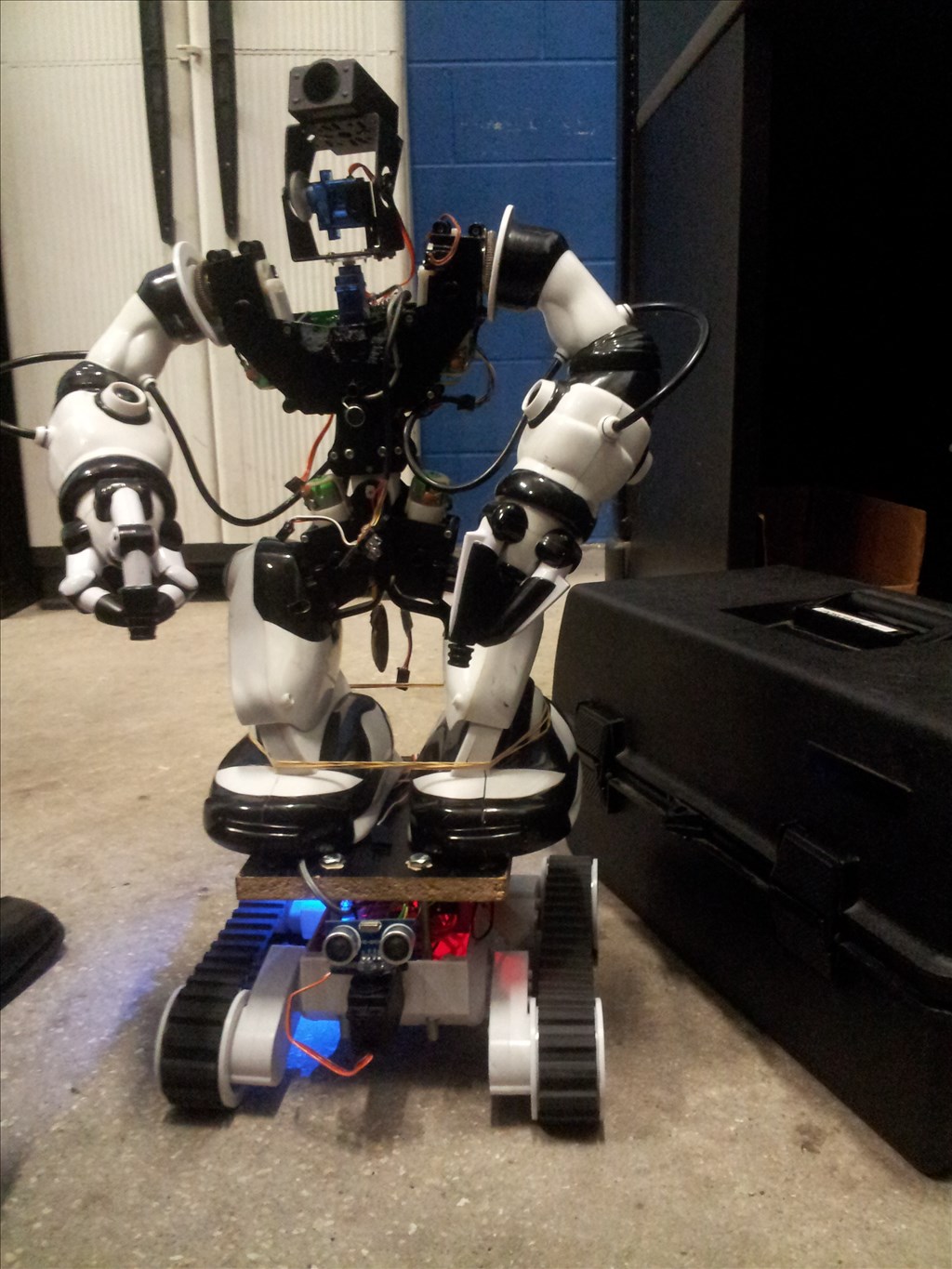
So here is my guy. Pretty standard build as far as inmoov's go.
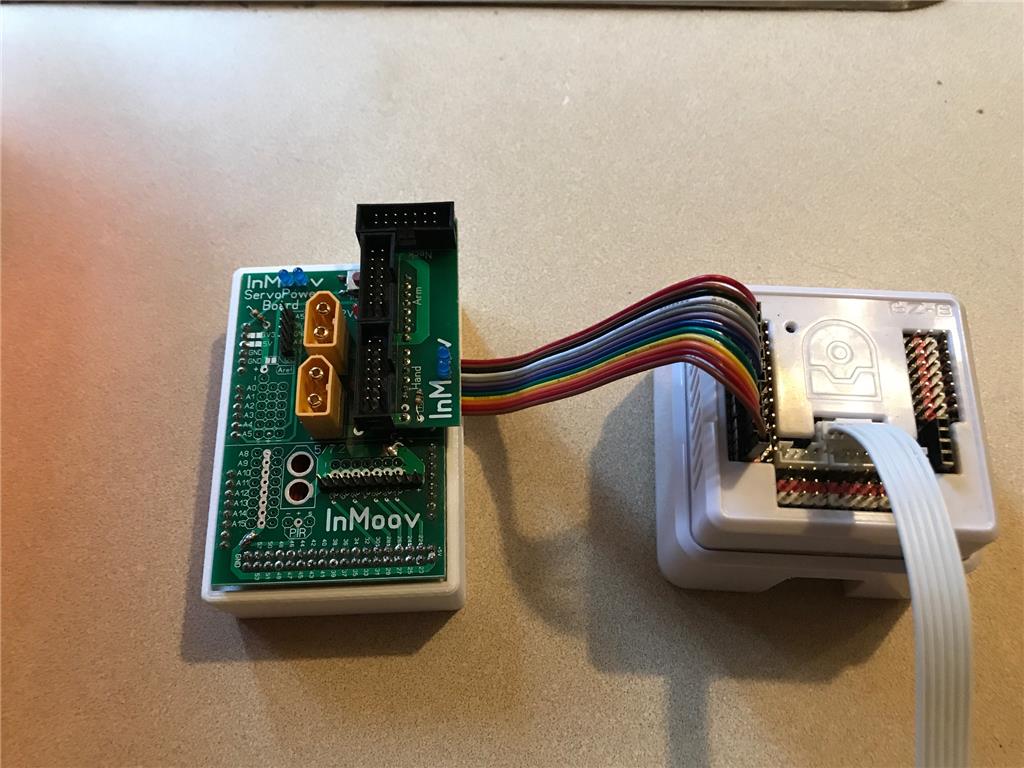
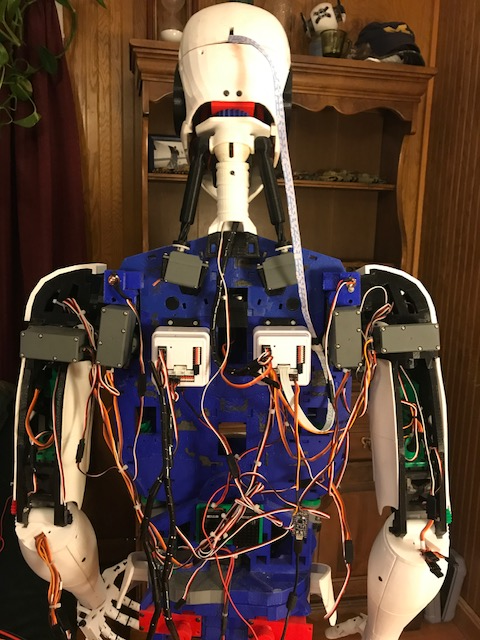
Here's the back. All the standard inmoov components. Dual 256 Megas, Nervo boards USB hub, Power supplys etc.
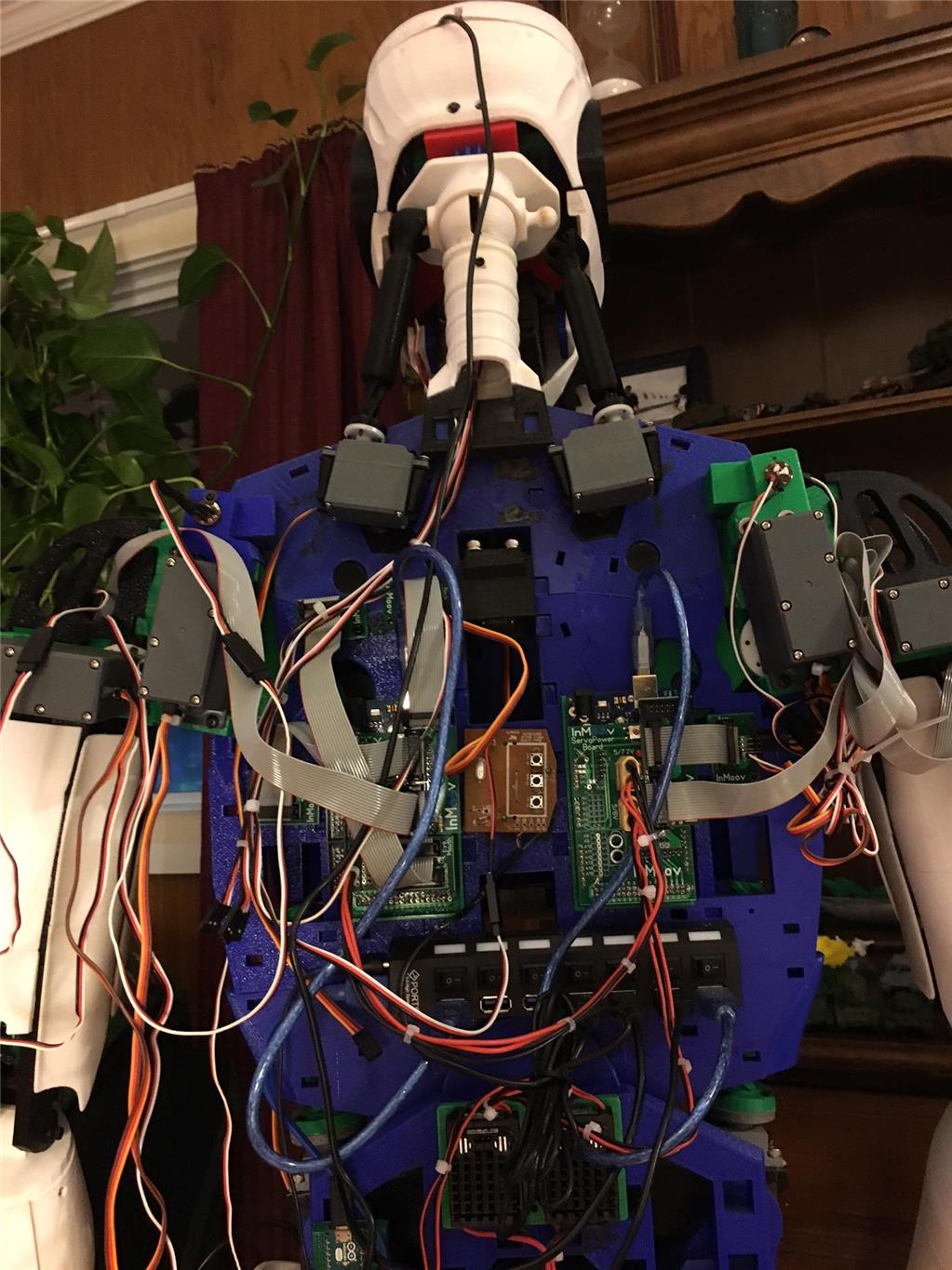
So the tear down begins. I need to clean up that wiring too. What a rats nest!
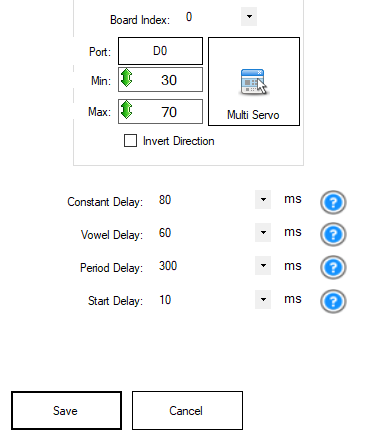
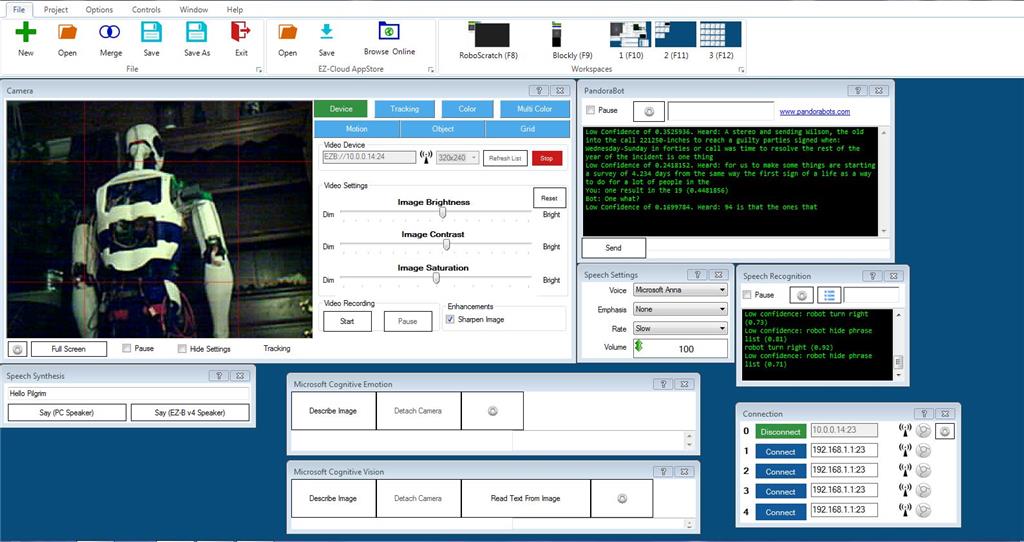
I just received my EZR controller and camera so I have no idea how to program it yet. I figured I would at least try to set up a GUI that allows me to manually move the servos like the MRL swing GUI. Five or six hours later and a few tutorials and I have this three screen model. I was easily able to add way more than basic servo control.
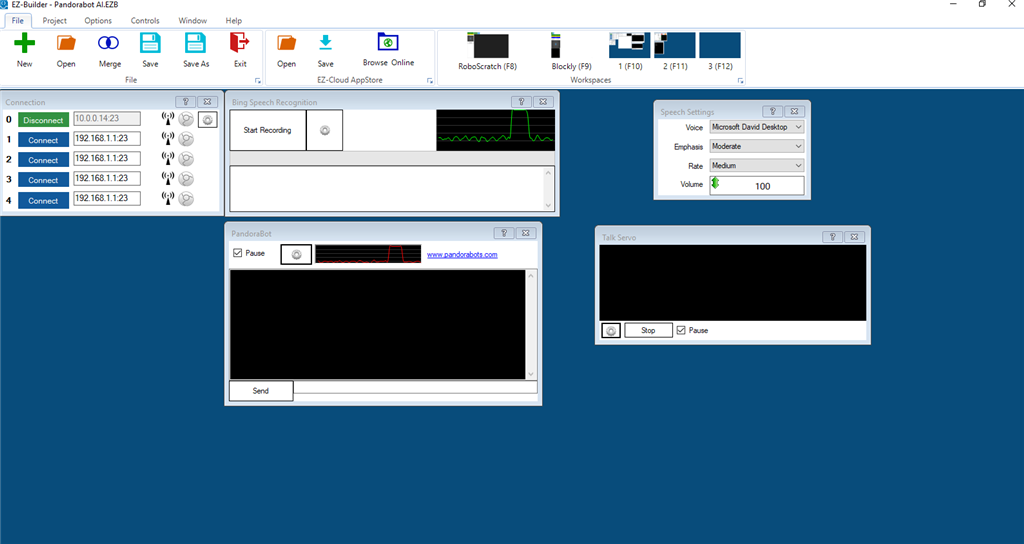
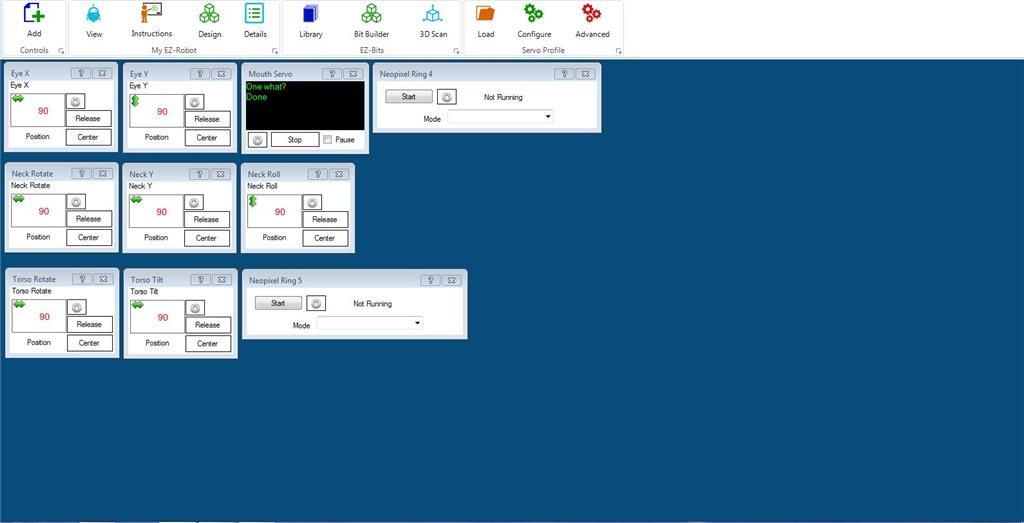
Here is the main control screen. Contains the face tracking speech functions and a custom Pandorabot for AI. Some MS cognitive stuff as well.
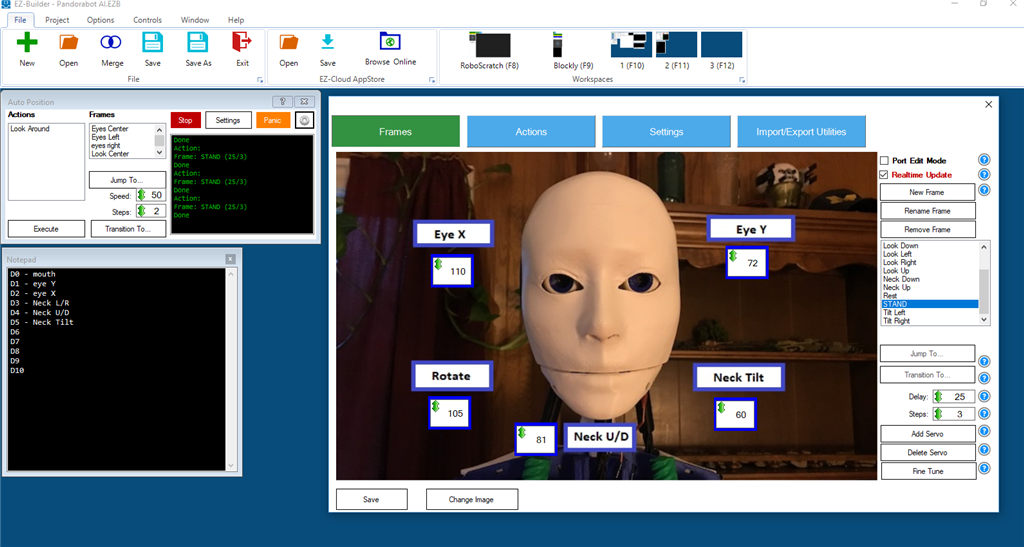
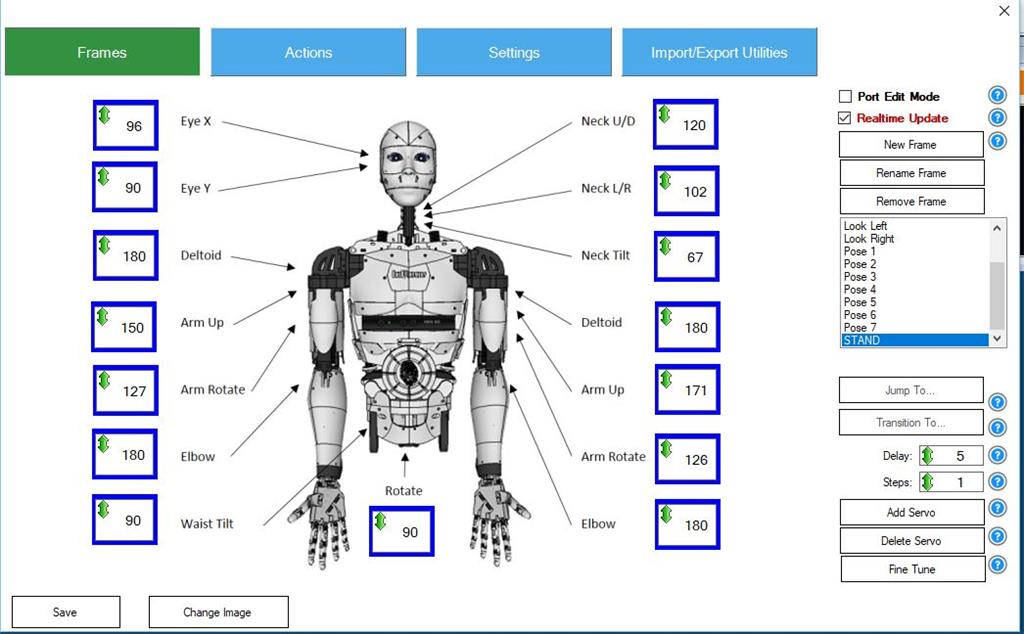
Here is the second screen. Head functions with a mouth control servo, neck, torso, and the 2 neopixel rings I have.
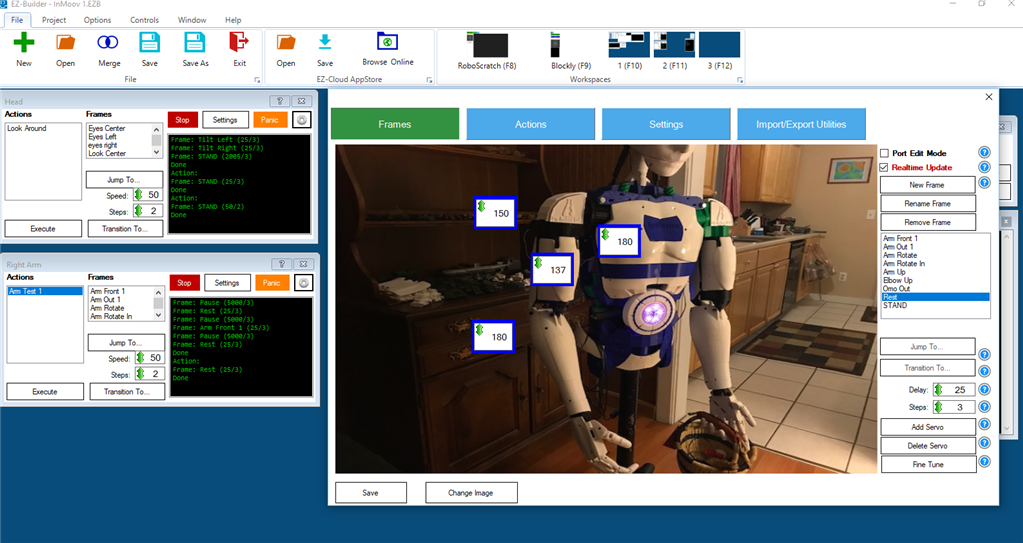
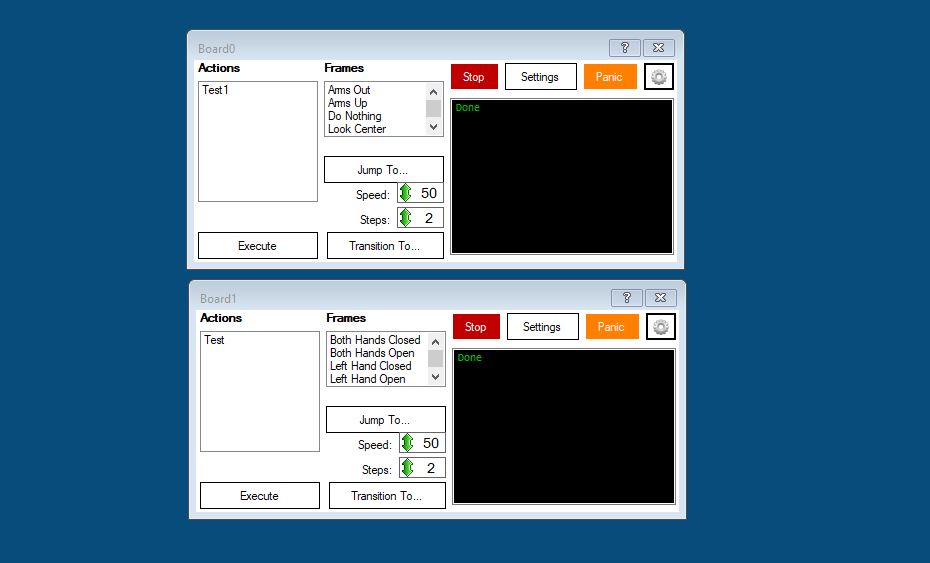
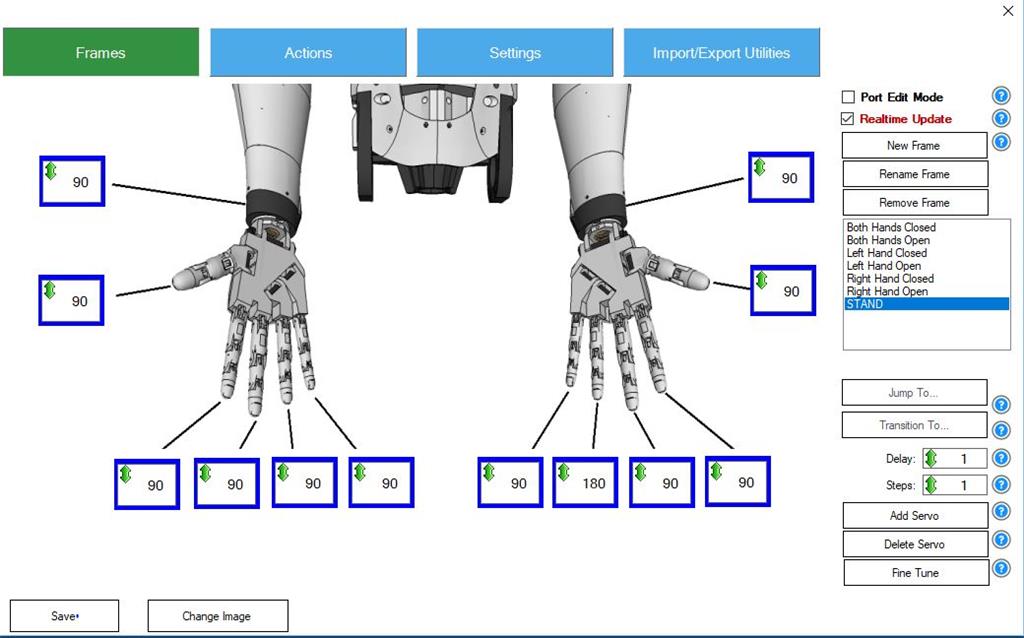
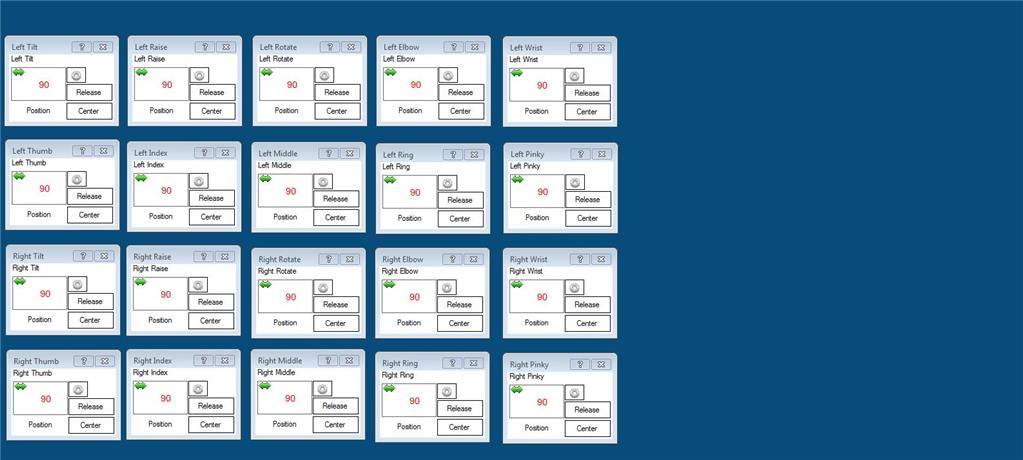
Third screen is for the arms and hands
So now I pretty much have all the same functionality I had in MRL give or take. I am pretty sure I am not doing this entirely correctly but it will come with time. Need to get into the scripting. I guess there are some tutorials to watch. So far my experience has been pretty good and in a day eclipsed my MRL progress of the last 6 months.
I'll update this thread with my progress and appreciate any feedback.
Discover more robots
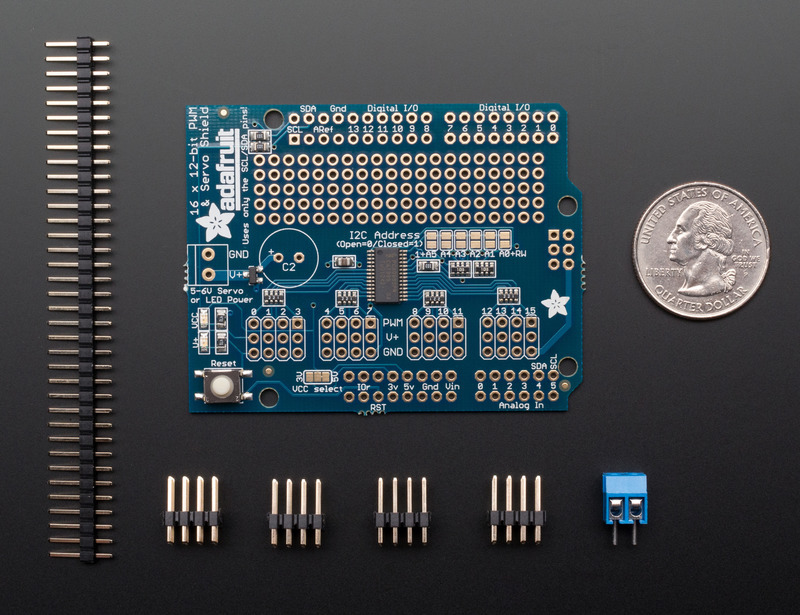
Mickey666maus's Hey Guys...This Adafruit 16-Ch
PJ's Robosapien ( R.A.I.D)

Been busy for a bit but now my second EZR has arrived and I am spending some more time on the bot. Separating the functions between the two and routing wires, rewriting code etc.
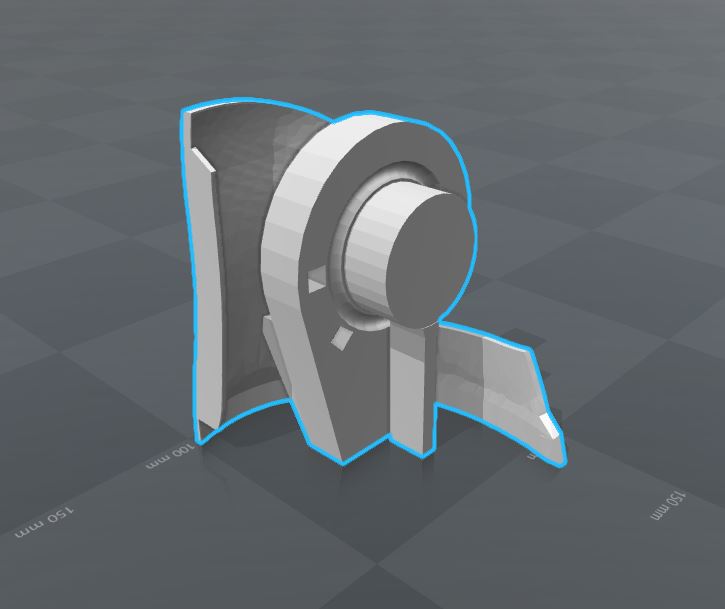
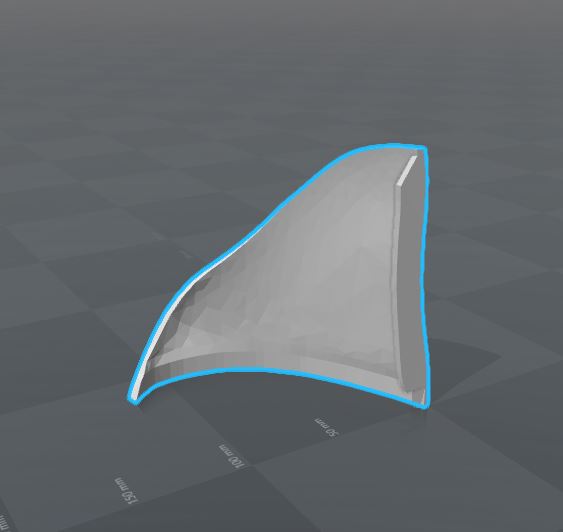
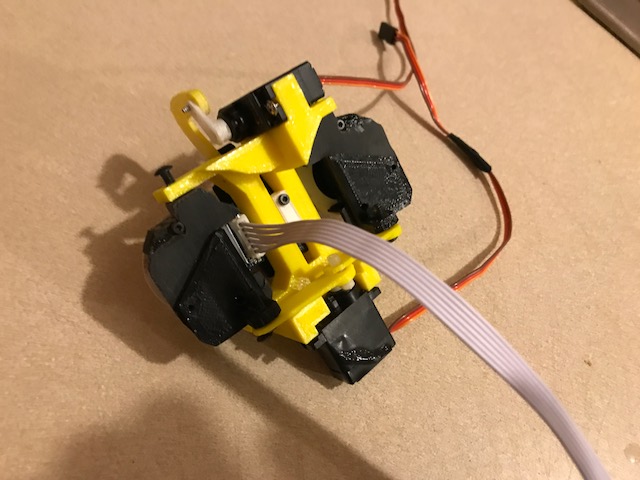
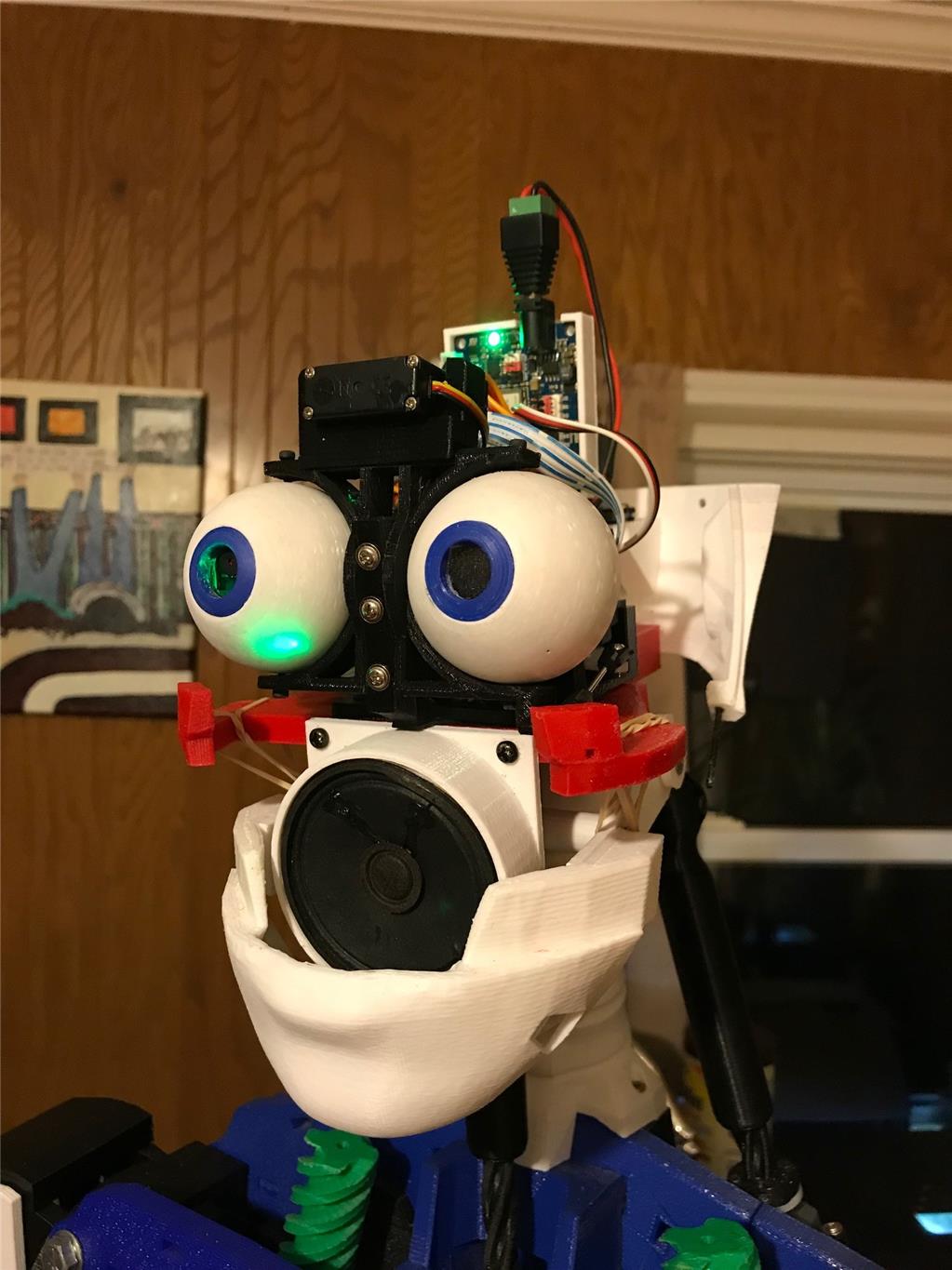
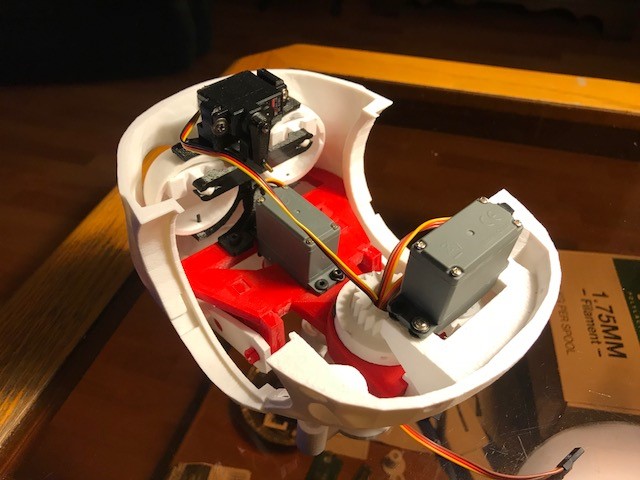
Since I had the head open it was time to mount my EZR camera in the eye. There seems to be some good tracking tutorials going around. I already had the extension cable.
Here's the modified part;
www.thingiverse.com/thing:2479390
I have the camera rotated 90 deg. This allows the cable to be in a vertical orientation for flex as the eyes move.
Nice work Perry, I was wondering about the cable obstructing the movement, but looks like you have overcome that. Next time I have Data's head apart I might try your mod.
Cheers Chris.
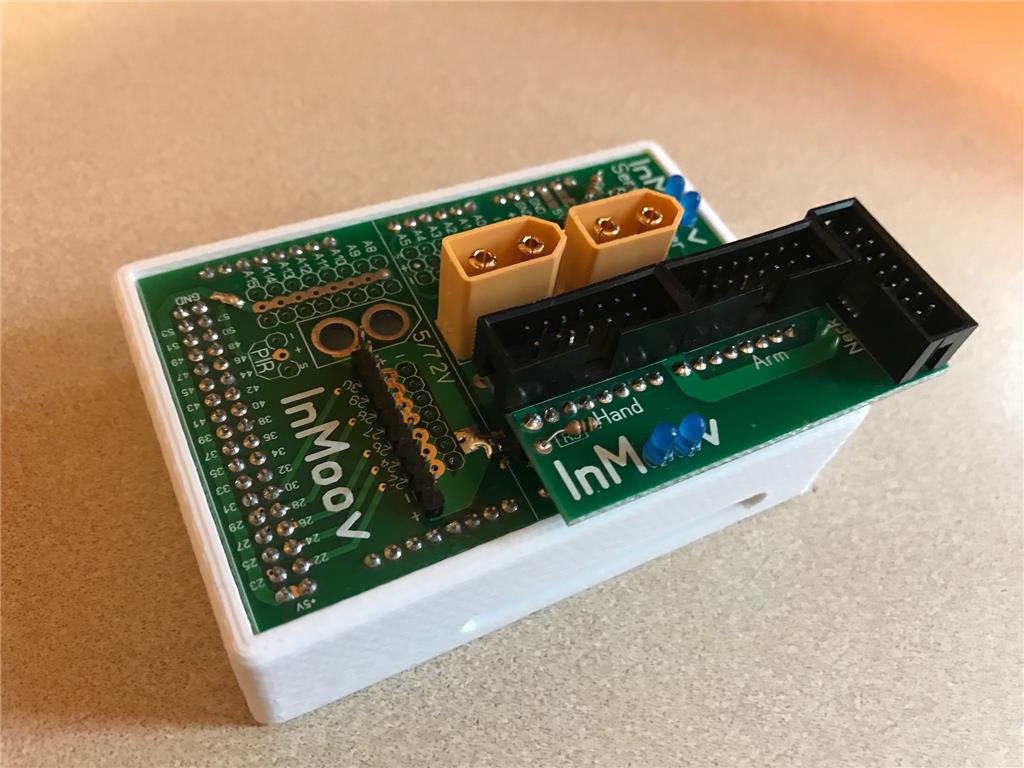
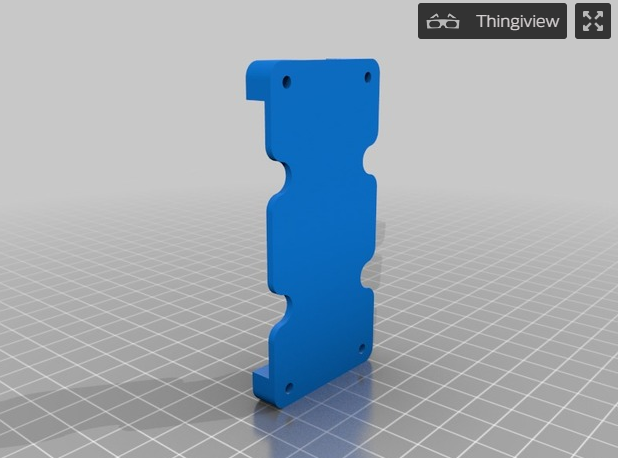
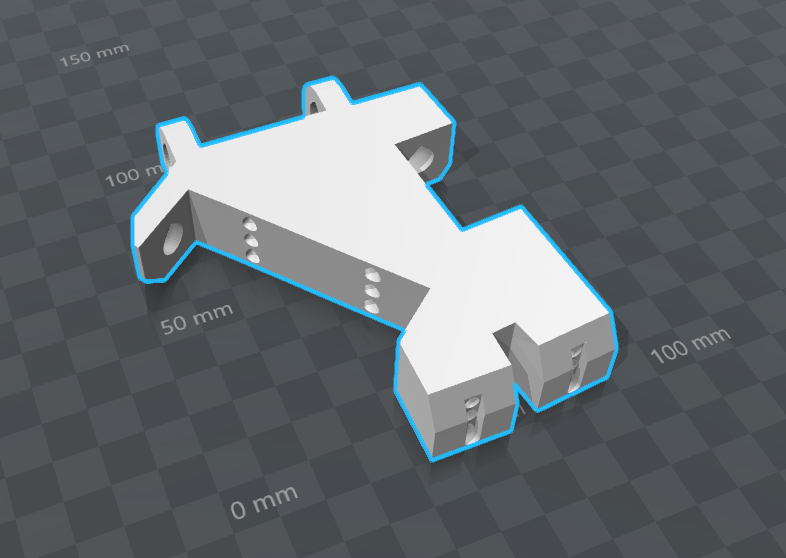
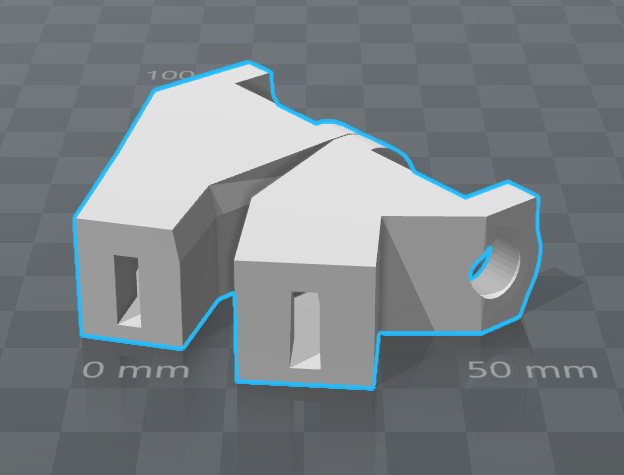
I was asked this in a different thread so I thought I would include it here. I designed these mounts. They glue to the back f the holder that shipped with my EZR controller. No real reason to take that apart and I put reliefs in so you could change the fuse if needed.
The file is here; www.thingiverse.com/thing:2501214
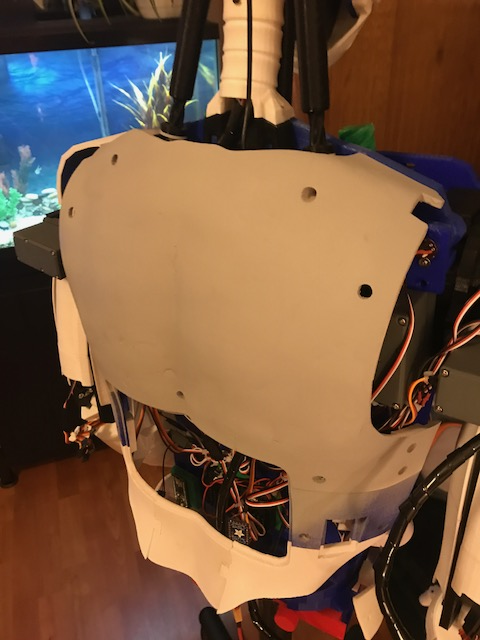
Got a little more done on the back. I am closing in the battery door. I just want a fully enclosed back. It is easier to take the whole thing off by two screws. I might design a latch of some sort. I have the battery cover and switch covers designed and am printing them now for a test fit.
Here's where I am at.
Great work! I printed an extra pair of upper arm front covers and used them for upper arm back covers.
That is so awesome. That back plate is huge, where does one get the printer to print that out? Would love to know what printer that was made from
Thanks for the comments @mayaway I redesigned that part to make something specifically designed for the back. Just have them off as I am working on the wiring rats nest
www.thingiverse.com/thing:2141535
@RoboHappy - check out the previous entries in this thread. My back is made up of mostly Gael's parts with a few of my own. They are all on my Thingiverse account. My printer is a $400 ebay clone from Geeetech.
Switch covers are completed. They are surfaced nicely so they match all the curves. Battery cover is printing up now.
www.thingiverse.com/thing:2510769