
Robot Building Questions



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
"I build robots" Hoodie

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

PCA9685 Servo Driver
Drive 16 servos over EZB I2C with a PCA9685 PWM controller, using ARC servo commands and...

Telepresence and remote control for any ARC-compatible robot from phone/tablet, combining AI and human operators to perform tasks and train autonomy

Synthiam ARC mapping/nav and Roomba movement panels power Mini-Move: a .64-scale inmoov on Create 2 with scaled servos and eyepod head
ARC On Unplugged Mode
I can use the robot JD only at school and for this I want to prepare at home the code with ARC first and then use it with JD at school. I installed the SW on PC and on Tablet. I was wondering: Is it possible to use ARC in unplugged mode? Thank you Claudio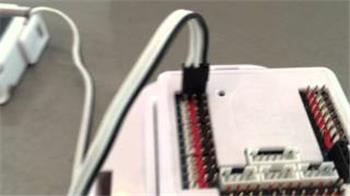
Jd Set Up/Connection
So I feel like I am missing something and that the issue is quite simple however I have yet to correct it. I've been following the online tutorials step by step. I cannot get past...
Mp1584en Dc-Dc Buck Converter
Hi, I am working on Roomba and InMoov projects. I needed something to step down power from 12VDC for sensors on InMoov and Step down power from Roomba to EZ B....
Is This Iotiny Used?
Question for those of you that have bought an IOTiny recently. I ordered mine and it arrived very quickly to the US. Shipping cost was high but delivery time was great Thing is...Proxy Authentication Required (407)
Hi, I work at a school and we use a proxy server. I am not able to successfully authenticate to EZ-Cloud. Here is the error that I am receiving: Error: The remote server returned an error (407) proxy authentication required. I receive this error after I try to login to EZ-Cloud Account Settings email address & password. I have looked through...
Question On Size Of Target Window Camera Control
Is it possible to change the size of the capture red box (80x80)? If i change the size from 320 to 640 camera resolution,...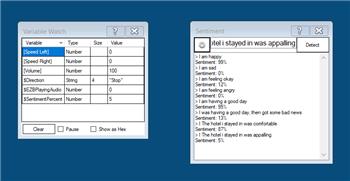
Usage Ideas For Cognitive Sentiment Control
Hey guys. So, I've had a quick play with the new Cognitive Sentiment Control today... Found in ARC under... Project, Add, Artificial...The Robot Does Not Speak
I changed the settings so that the robot spoke through another port. At first everything worked fine but then the robot stopped talking even when i put it on charge . Why did this happen ?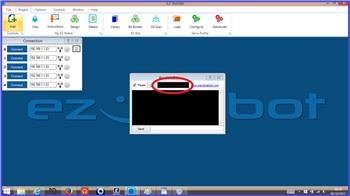
Pandorasbot [Roblem
Hello EZ-B Team & forum..., Ithink tha i have a problem with PandorasBot control. I can't "see" the Speech Recognition Visualizer and pause control ... Any help...
Ez-Robot Lidar?
So I have been waiting somewhat patiently for the LIDAR system to come out. It was posted on EZRobot's website that it will be available February of 2018. It is now March and not even a word...