Struggling With Autoposition
Not a fan of the autoposition, but I had to tackle it for the drink robot because unlike servo recorder, I needed the robot to precisely grab a cup and repeat positions over and over. Which he does.
First of all I have read every "?" by every button and slider and I still dont get most of whats happening.
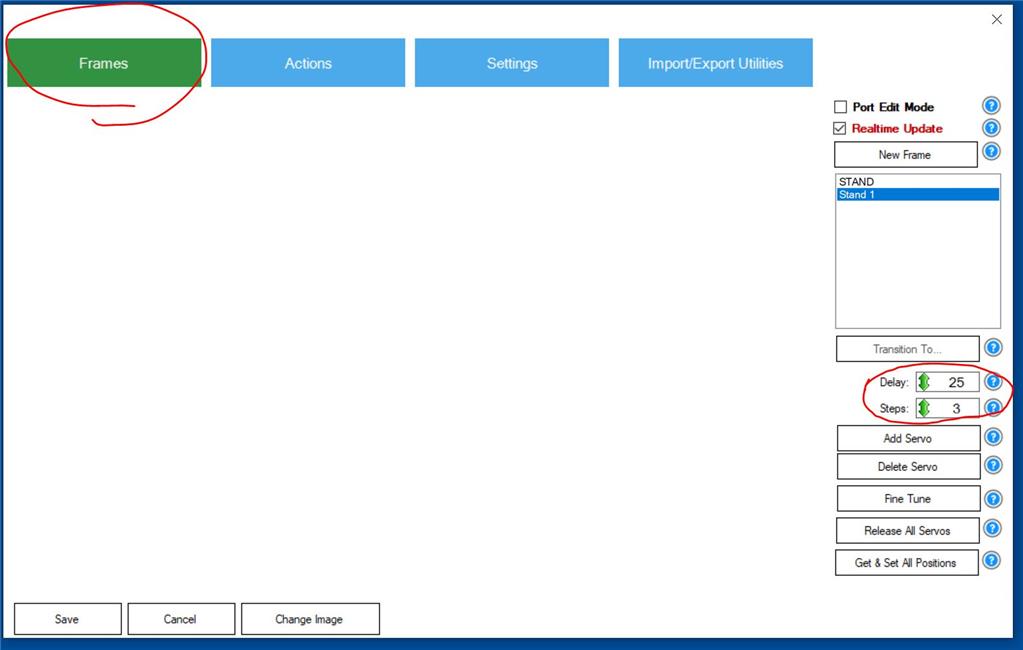
My issue is understanding the redundancy of different speeds and steps in all the windows and how that affects the servos in each one. Of the three windows I understand "Frames" window the best as this is where you begin and can see the effects on the servos.
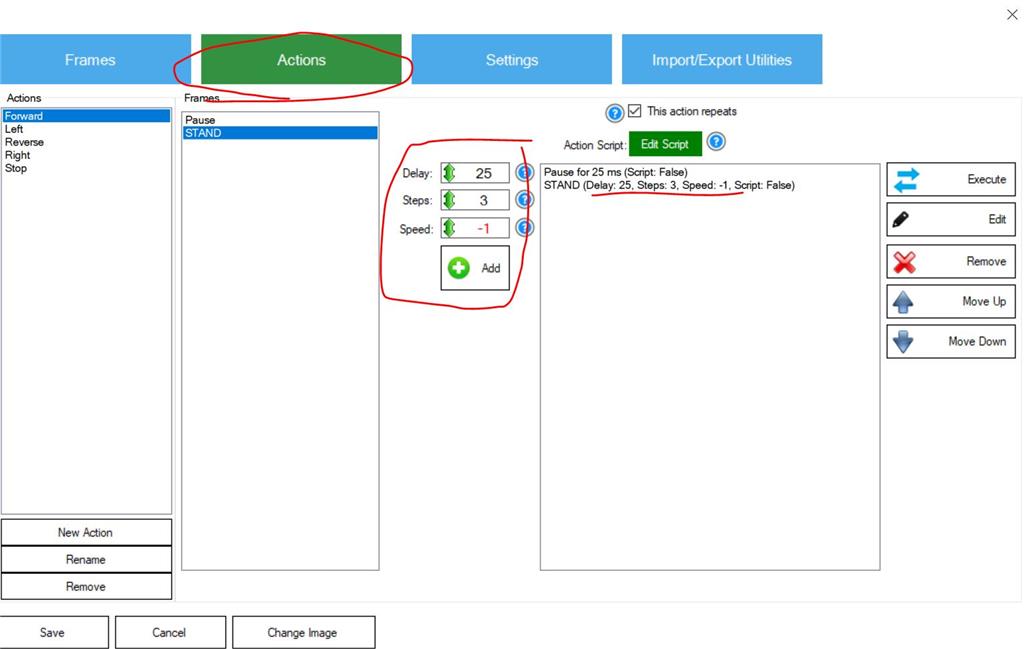
But as I move on to the "Actions" tab I am again shown delay and steps and now speed. The speed here goes from -1 to 20. I understand I can change this for each frame, but after I set the motions and then decide to go back and edit the speed button on the right, there is no noticeable speed change to my animation ( i also understand that the higher the number the slower the motion)
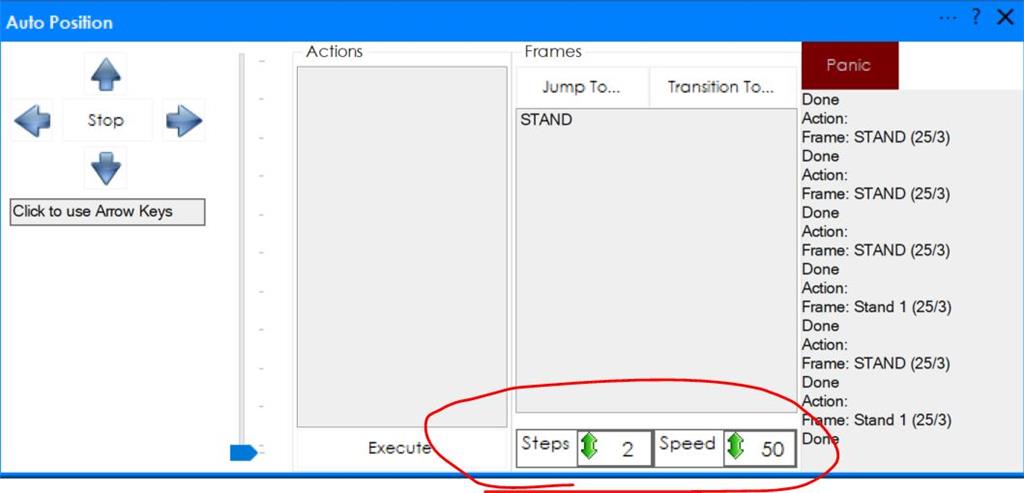
Finally, when actions are set up and you go to the main window for Auto Position I am again presented with another STEP and SPEED, this time the speed goes to 0-50. Why?
Yesterday I broke part of the drink robot because I am struggling with this animation system. Its ok if you are playing with a toy sized robot, but when programming a lifesized robot, things can go expensively wrong, when disaster strikes or worse someone gets hurt.
Please take the time to explain to me how this redundancy is supposed to work.
Related Hardware (view all EZB hardware)

Related Robot Skill (view all robot skills)


Yes you can. Just setup a button that creates a frame. So every time you’re in a frame, press the button to create the frame and add it to the specified action
I am so looking forward now to making animations for the B9 robot arms that I'm building.
Disaster aversion question.
When running a script with an Auto Position action in it, will command control wait until that action is complete before moving onto another action?
Too late. Went ahead and tried with wife holding the plug ready to pull it if all went wrong which it did. He pushed over the table and I caught it with one finger before she pulled the plug.
Is there a command for Auto Position equivalent to servo recorders $isservorecorderrunning = false command ?
Hi Will, Sorry to hear you are fighting this issue. I don't know what your project looks like or how it's set up However there is a variable you can use to let the CommandControl know to wait till the AutoPosition Control has stopped running. Here it is:
You can also add a script to run when a frame or action runs. create and edit them from inside the Auto Position control. Maybe you can write a code here that will pause till your AutoPosition control action completes?:
Thanks Dave that is exactly what I was looking for.... but could not find any documentation on it..at least where I was looking! Do you have a link to where that code is? Or specifically in the manual?
Hi Will.
Open the link below and scroll down in the middle under ContorlCommand. "What If I Want To Wait?" https://synthiam.com/Support/Programming/control-command
BTY. You and Dave make awesome robots!